

Vaizdo įraše galite pamatyti, kaip veikia robotas. Veikimo metu jis palaipsniui keičia spalvą.

Medžiagos ir įrankiai robotui surinkti:
- U formos tvirtinimo laikikliai;
- keturios 1,5 V LR44 baterijos;
- daugiaspalvis RGB-LED su perjungimo funkcija;
- izoliaciniai vamzdžiai;
- plieninis kaištis;
- žemos įtampos variklis, RF-300CA;
- mygtukas robotui įjungti (dviem laidais);
- laidai variklio prijungimui;
- mirksi aliarmo šviesos diodas.
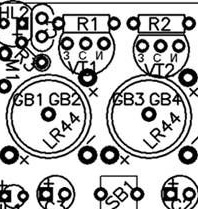

Dėl būtino elektroninis elementai, jie parodyti paveiksle. Spausdintinė plokštė pagaminta iš PCB folijos lapo, jos matmenys yra tik 30X30 mm. Autorius taip pat rekomenduoja montavimui naudoti mažus polinius kondensatorius.
Robotų gamybos procesas
Pirmasis žingsnis. Roboto schema
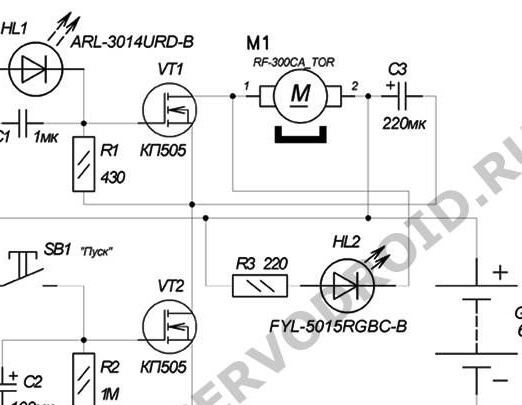
Roboto grandinę galima pamatyti paveikslėlyje. Įdėjęs akumuliatorių, robotas yra išjungtas, norėdami jį įjungti, paspauskite mygtuką SB1. Iškart po to kondensatorius C2 iškart įkraunamas. Teigiama plokštė iš kondensatoriaus yra prijungta prie lauko efekto tranzistoriaus VT2 vartų. Šiuo atžvilgiu, pasiekus perjungimo slenkstį, šio kanalo kanalizacijos šaltinio kanalo varža akimirksniu mažėja ir kanalizacijos metu susidaro neigiamas potencialus krūvis. Na, kas nutiks toliau, galima išsamiau pamatyti diagramoje.
Antras žingsnis Sumontuokite RGB LED
Šviesos diodas po numeriu 1 yra sumontuotas ant spausdintinės plokštės. Brėžinyje ši padėtis vadinama HL2. Įdiegus šviesos diodą, jo išvados turi būti sulenktos taip, kad šviesos diodas būtų nukreiptas į šoną. Taigi veikimo metu šviesos diodas šviečia ne į viršų, o į šoną, apšviesdamas sienas. Kuria šviesa šviečia, nurodoma juoda rodykle.

Trečias žingsnis Sumontuokite akumuliatoriaus tvirtinimo kronšteinus
Norint užmegzti kontaktą tarp akumuliatoriaus ir roboto, naudojami stūmokliai.Vienas mygtukas įmontuotas centre, diagramoje jis pažymėtas kaip GB1, GB2, o antrasis nustatytas į padėtį GB3, GB4. Norėdami saugiai pritvirtinti kontaktus, mygtukai yra lituojami dideliu kiekiu litavimo.


Baterijos yra sumontuotos ant metalinio mygtuko, esančio po numeriu 3. Baterijos yra pritvirtintos U formos užsegimu, ant kurio dėvimi vamzdžių izoliatoriai. Viršutinę laikiklio dalį reikia šiek tiek sulenkti lanku žemyn, tai leis baterijas prispausti prie apatinio kontakto. Izoliaciniai vamzdžiai reikalingi tam, kad vertikalūs akumuliatorių paviršiai nesiliestų su horizontaliaisiais.
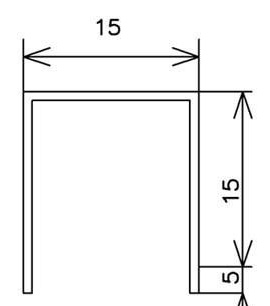
Norėdami pagaminti U formos tvirtinimo elementą, turite naudoti du popieriaus spaustukus. Juos reikia sulenkti į U formą, kaip nurodyta brėžinyje. Galima naudoti bet kokius mėgintuvėlius, čia naudojamas polivinilchloridas. Jų aukštis turėtų būti lygus baterijų aukščiui.
Laikiklį montuokite litavimo būdu, tam jums reikia išlyginti jo galus. Trinimui būtina naudoti neutralų, neplaunantį srautą.
Ketvirtas žingsnis Įdiekite variklį
Variklis sumontuotas toje lentos pusėje, kur praeina takeliai, jis yra su velenu žemyn. Norėdami pritvirtinti variklį, galite naudoti karštus klijus arba dvipusę juostą. Bet prieš tvirtai pritvirtindami variklį, turite jį prijungti ir patikrinti visos sistemos veikimą.

Penktas žingsnis Sąranka ir testavimas naminis
Surinkę robotą, galite išbandyti ir konfigūruoti. Norėdami tai padaryti, turite įdiegti baterijas į robotą, jos yra sumontuotos vietoje GB1, GB2 ir GB3, GB4. Tokiu atveju elektronika turi būti išjungta. Įdėjus baterijas, robotas gali būti įjungtas, tai daroma naudojant mygtuką SB1. Paspaudus jį, variklis turėtų pradėti veikti, mirksi HL1 šviesos diodas, taip pat įsižiebia RGB šviesos diodas.
Po kurio laiko robotas automatiškai išsijungs, sustos ir visi diodai užges. Tada jis įjungiamas taip pat, kaip pirmą kartą, paspaudžiant mygtuką.

Norėdami pakoreguoti roboto laiką, turite eksperimentuoti su rezistoriaus R2 ir kondensatoriaus C2 vertėmis, jie yra atsakingi už šią funkciją. Jei jums reikia nustatyti maksimalų roboto veikimą, tada kondensatoriaus talpa turėtų būti kuo didesnė. Tokiu paprastu būdu galite surinkti tokį įdomų robotą.