


Dalį savo projekto aš paėmiau iš „Lego Technic 42049“ ir „Lego Technic 42041“ surinkimo instrukcijų. Likusi dalis yra mano improvizacija. Valdymui naudosiu „Bluetooth“ modulį, susietą su „Android“ įrenginiu ar kompiuteriu. Taigi mums reikia:
- „Lego Technic 42029“
- „Lego Technic 42033“
- „Arduino Pro Mini 5v AT Mega 328“
- L9110S variklio vairuotojas
- 1 servo pavara SG-90
- „Bluetooth“ modulis HC-05 arba lygiavertis
- „USB-UART“, skirtas „arduino“ programinei įrangai
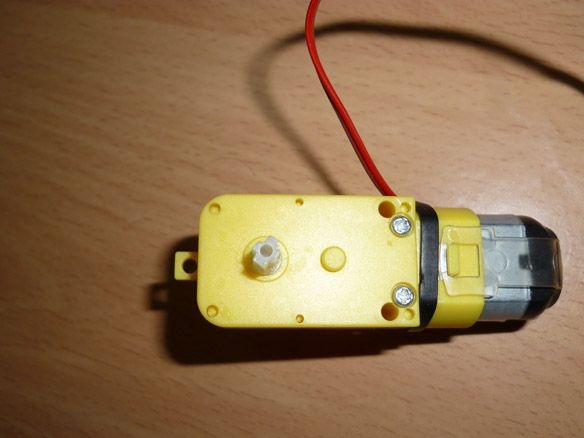
- Variklio pavarų dėžė 6v 1: 150 100 aps / min
- 2 šviesos diodai
- 2 varžai 150 omų
- kondensatorius 10v 1000uF
- 2 vienos eilės šukos PLS-40
- Induktorius 68mkGn
- 6 NI-Mn 1.2v 1000mA baterijos
- Tėčio ir mamos jungtis su dviem smeigtukais prie laido
- Homutikas
- Įvairių spalvų laidai
- litavimas
- Rosinas
- lituoklis
- 3x20 varžtai, veržlės ir poveržlės
- Varžtai 3x40
- Varžtai 3x60
1 žingsnis Galinės ašies mazgas
Judėjimą pirmyn - atgal vykdys reduktorius su 6 V varikliu, 1: 150 perdavimo santykis ir 100 apsisukimų per minutę laisvosios eigos greičiu. Galite išbandyti kitą pavarų skaičių, bet, mano manymu, tai yra optimaliausia. Pavarų dėžės ašis iš abiejų pusių turi būti įpjauta kryžiaus pavidalu ir uždėta lego detalių:
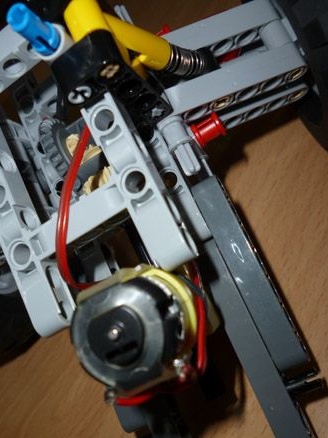
Toliau mes renkame galinės ašies pagrindą pagal „Lego 42029“ 1 dalies instrukcijas, pradedant nuo 3 puslapių iki 8 imtinai. Ir pridėkite keletą detalių, kad galėtumėte įdiegti variklį ir pavarų dėžę.
Peržiūrėti internetinį failą:
Peržiūrėti internetinį failą:



2 žingsnis Priekinės ašies surinkimas
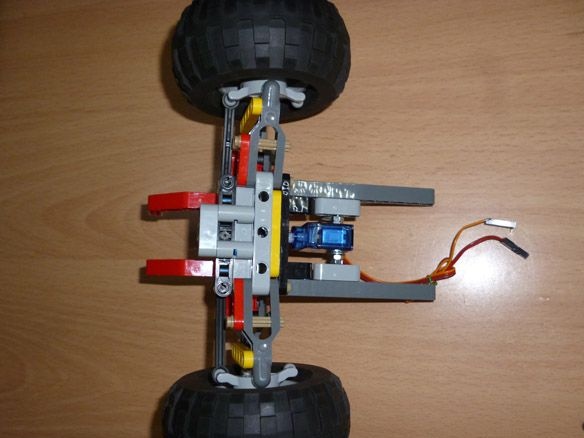
Priekinę pakabos dalį surenkame pagal „Lego 42029“ 1 dalies instrukcijas nuo 21 iki 23 puslapio. Mes imame trapecijos formą iš antrosios „Lego“ dalies nuo 6 iki 11 psl. „Servo SG-90“ puikiai tinka pasukti ratus. Norėdami jį pritvirtinti prie mūsų modelio, būtina kruopščiai išgręžti, kad neliestumėte vidinių servo dalių, 3,2 mm skersmens skylės ar tiesiog supjaustytų kanceliariniu peiliu. Taip pat nupjaukite kyšančias dalis (tvirtinimo „sparnus“). Mes įkišame varžtą į padarytą skylę ir pritvirtiname veržlėmis. Ant servo veleno mes uždėjome svirtį su atsukta dalimi iš lego:





3 žingsnis Pagrindo ir kabinos surinkimas
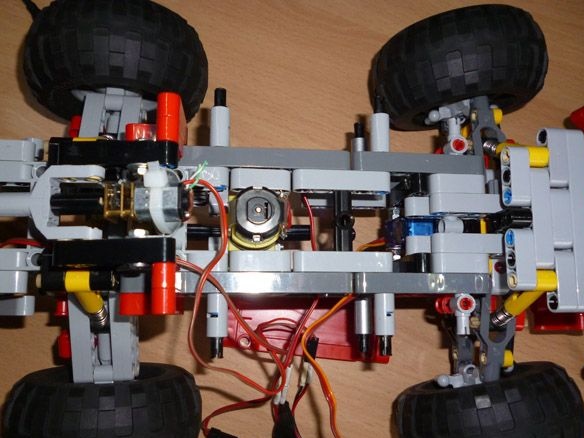
Mes sujungiame abu tiltus, kaip parodyta nuotraukoje:
Mes surenkame saloną pagal „Lego 42041“ instrukcijas. Pradedant nuo pirmosios dalies 39–47 puslapių. Toliau nuo antrosios dalies 5–28 puslapių. Taip pat buferis, nurodytas antrosios instrukcijos 38–43 puslapiuose.
Peržiūrėti internetinį failą:
Peržiūrėti internetinį failą:


Peržiūrėti internetinį failą:
Peržiūrėti internetinį failą:
4 žingsnis - elektra
Valdymui naudosime „Arduino Pro Mini“ ir „Bluetooth“ modulį. „Pro Mini“ galima pakeisti bet kuria kita „Arduino“ lenta. Aš pasirinkau „Pro Mini“, taigi jis yra mažiausias. Variklio vairuotojas reikalingas varikliui prijungti.
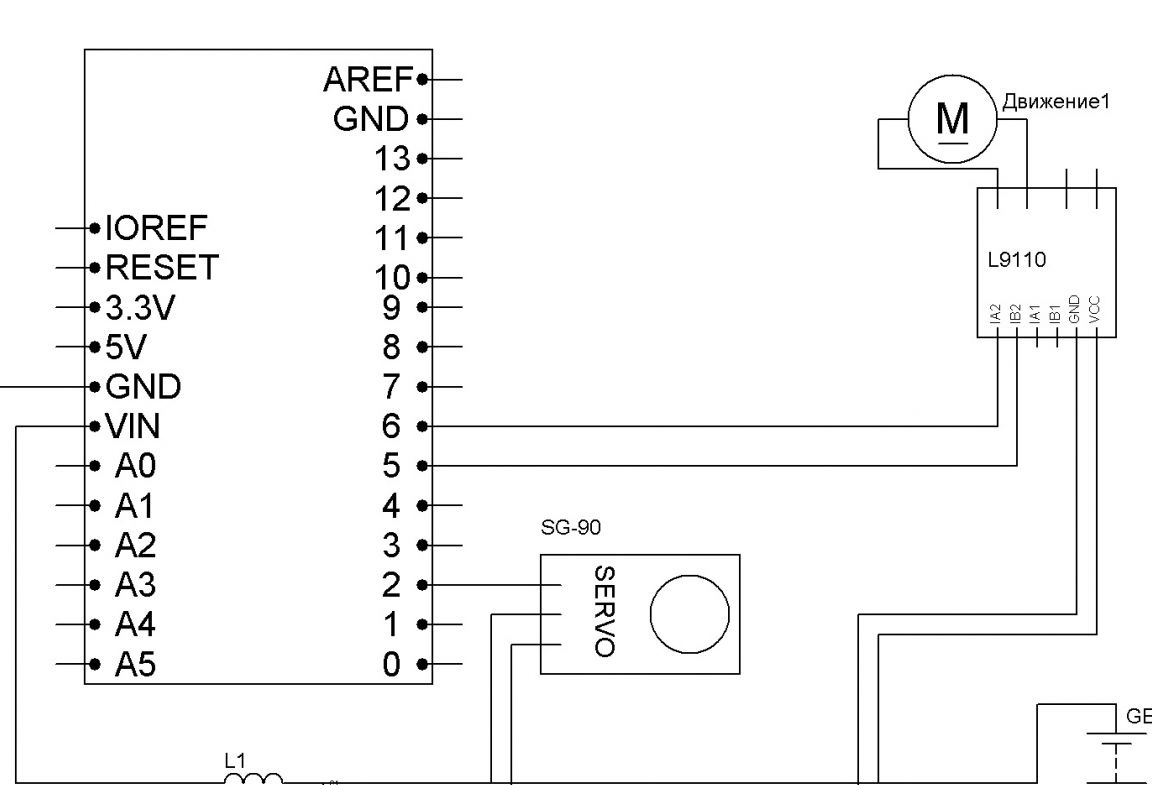
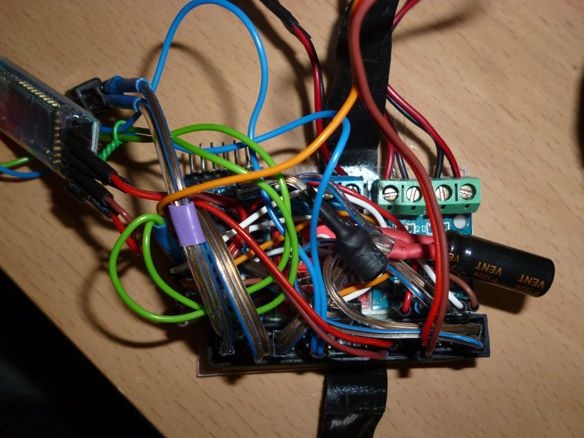
Visų komponentų sujungimas su „Dupont“ motinos ir motinos laidais. Maitinimas - 6 NI-Mn 1.2v 1000mA baterijos, sujungtos nuosekliai. Bet kokio mažos galios kondensatorių, taip pat induktorių, kurį rasite, jums reikia stabilizuoti mikrovaldiklio galią. Dviejų šviesos diodų anodai yra prijungti prie 4 kontaktų arduino, katodai - prie GND. Rezistoriai pasirenkami naudojamiems šviesos diodams. Patogumui akumuliatorius suvyniokite į juostelę.

Viską klijuojame ant dvipusės juostos, remdamiesi:
Mes statome elektriką tarp ratų ir uždarome:
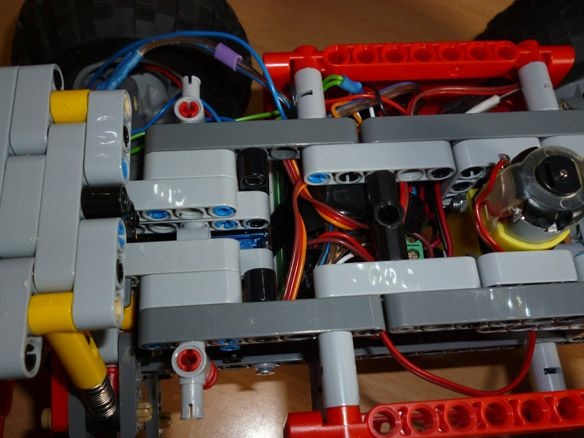
Pridėkite porą potėpių:


5 žingsnis „Bluetooth“ sąranka
Šiandien prieinamiausi „Bluetooth“ moduliai yra „HC-05“ ir „HC-06“. Jų gausu Kinijos internetinėse parduotuvėse. Skirtumai tarp jų yra tai, kad pirmasis gali dirbti tiek pagrindiniu (pavaldiniu), tiek pavaldiniu (pagrindiniu) režimu. Antrasis yra grynai vergų įrenginys. Kitaip tariant, HC-06 negali aptikti suporuoto įrenginio ir užmegzti su juo ryšio, jis gali tik paklusti šeimininkui.
Trumpos modulių charakteristikos:
- „Bluetooth“ mikroschema - BC417143, pagaminta
- ryšio protokolas - „Bluetooth Specification v2.0 + EDR“;
- veikimo spindulys - iki 10 metrų (2 galios lygis);
- suderinamas su visais „Bluetooth“ adapteriais, palaikančiais SPP;
- „Flash“ atminties kiekis (programinės aparatinės įrangos ir nustatymų saugojimui) - 8 Mbit;
- radijo signalo dažnis - 2,40 .. 2,48 GHz;
- pagrindinio kompiuterio sąsaja - USB 1.1 / 2.0 arba UART;
- energijos suvartojimas - srovė ryšio metu yra 30–40 mA. Vidutinė dabartinė vertė yra apie 25 mA. Užmezgus ryšį, dabartinis sunaudojimas yra 8 mA. Miego režimo nėra.
Paprastai moduliai parduodami kaip dvi plokštės, kartu sulietos. Mažesnis yra gamyklos modulis, plačiai naudojamas įvairiuose elektroninis prietaisai. Didelė - speciali lentynėlė pasidaryk pats.
Štai kaip atrodo moduliai „HC-05“ ir „HC-06“ (pasidaryk pats):
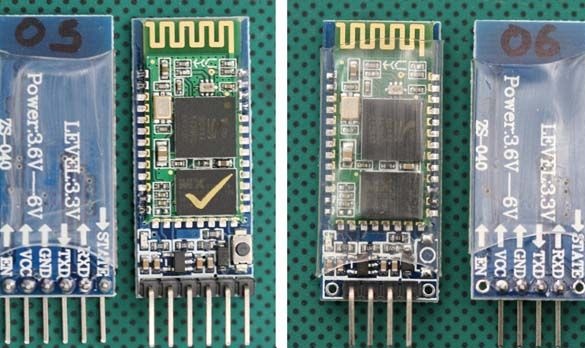
Iš esmės galite naudoti bet kurį jums patinkantį modulį. Modulis be lentjuostės kainuoja mažiau, tačiau tada turėsite pasirūpinti 3,3 V modulio maitinimo šaltiniu ir kankintis patys, litavę laidus prie modulio. Aš pasirinkau optimalų, mano manymu, kainos ir funkcionalumo santykį HC-06.
Mes jungiame taip:
„Arduino Pro Mini“ - „Bluetooth“
D7 - RX
D8 - TX
5V - VCC
GND –GND
Kad modulis veiktų tinkamai, jis turi būti sukonfigūruotas. Mes sukonfigūruosime AT komandas, įvestas į terminalo langą. Pateikiu HC-05 modulio nustatymo pavyzdį. Jei turite kitokį nustatymą, jis gali būti skirtingas. Tam, kad mūsų modulis gautų komandas, pirmiausia „Arduino“ mirksime naudodami šią programinę įrangą:
Šiuo atveju Arduino veikia kaip tiltas tarp kompiuterių ir modulio. Firminėje programinėje įrangoje aš naudoju „SoftwareSerial“ biblioteką. Dideliu greičiu jis veikia nestabiliai. Jei norite didelio greičio, modulį galite prijungti tiesiogiai prie „Arduino RX“ ir „TX“ kontaktų ir perrašyti programinę-aparatinę įrangą. Bet mano atveju mes dirbsime su moduliu 9600 greičiu. Taigi po firmware atidarykite terminalą ir įveskite:
„AT“ (be kabučių) turėtų būti atsakymas „Gerai“ (tai reiškia, kad viskas tinkamai sujungta ir modulis veikia)
„AT + BAUD96000“ (be kabučių) turėtų būti atsakymas „OK9600“.
Jei turite teisingą atsakymą, pereikite prie kito žingsnio.
7 veiksmas Firmware
Norėdami rašyti programinę-aparatinę ir pačią programinę-aparatinę įrangą, naudoju „Arduino IDE“. Dabartinė šios dienos versija yra 1.8. Iš tikrųjų programinė įranga:
8 žingsnis. Nustatykite savo telefoną.
„Android“ telefone turite įdiegti programą, kad galėtumėte valdyti robotą per „Bluetooth“. Jų yra labai daug. „Google Play“ galite įvesti „Bluetooth Arduino“ ir pasirinkti pagal savo skonį. Man patiko „BT Controller“. Atsisiųskite ir įdiekite į „Android“ telefoną ar planšetinį kompiuterį. Tada per „Android“ nustatymus turite užmegzti ryšį su mūsų moduliu. Ryšio slaptažodis yra „1234“ arba „0000“. Tada sukonfigūruokite programą, reikalingą komandoms. Sąrašas pateiktas žemiau.
9 veiksmas Kompiuterio sąranka (jei reikia)
Jei reikia ar tiesiog patogiau valdyti, galite naudoti kompiuterį ar nešiojamąjį kompiuterį. Norėdami tai padaryti, kompiuteris turi turėti „Bluetooth“. Mes užmezgame ryšį su savo moduliu per kompiuterio valdiklius. Tada mums reikia terminalo, kad galėtume siųsti komandas. Bet koks patogus jums.Įrašius programinę-aparatinę įrangą, valdymas atliekamas šiais mygtukais (komandomis):
W - pirmyn
S - atgal
A - kairė
D - teisingai
F - sustojimas
G - vairas
K - priekiniai žibintai
L - priekinis žibintas išjungtas
Nuolat įvesti komandas nepatogu, todėl komandoms siųsti rekomenduoju naudoti programą. Aš naudoju „Z-Controller“. Programoje pasirinkite prievadą („com“ jungtį, per kurią užmezgamas ryšys) ir sukonfigūruokite komandų klavišus. Nusistatykite laisvą laiką ir intuityviai.
