

Roboto darbo vaizdo įrašas
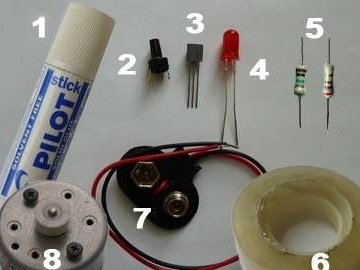
Medžiagos ir įrankiai robotui sukurti:
- sausų klijų lazdelė;
- skaidri juosta;
- dviejų kaiščių neužfiksuotas mygtukas;
- vienas mirksintis ARL-513URC-B tipo šviesos diodas;
- tranzistoriaus tipas KP505A;
- du rezistoriai, kurių nominali vertė 1M ir 270 omų;
- gnybtinė jungtis, skirta prijungti prie „Crown“ tipo baterijos;
- variklio modelis RF-300CA-D / C 3V ar panašus.

Roboto funkcionalumas ir savybės:
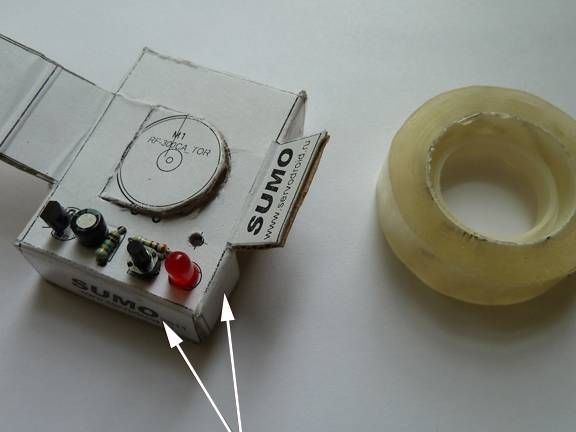
Nuotraukoje galite pamatyti jau surinktą robotas. Norėdami perkelti įrenginį, naudojamas tik vienas variklis, jis sumontuotas vertikaliai, bet tam tikru kampu. Judėdamas trumpu segmentu, robotas juda tiesia linija ir ilgesnėje atkarpoje sudaro lanką.
Vienas mygtukas naudojamas įjungti robotą, kai jis paspaudžiamas, robotas įsijungia 20 sekundžių. Po to įvyksta automatinis išjungimas, o robotas veikia budėjimo režime iki kito aktyvavimo.
Kitas roboto bruožas yra tas, kad jis automatiškai sustoja žiedo krašte. Šią sąlygą galima įvykdyti, jei priešininko svoris yra ne mažesnis už roboto svorį, o žiedo storis yra ne mažesnis kaip 3 mm.
Kaip maitinimo šaltinis naudojama 9 voltų baterija, ji sumontuota ant roboto. Dėl papildomo svorio robotas kaupia reikiamą kinetinę energiją reikalingiems veiksmams atlikti.
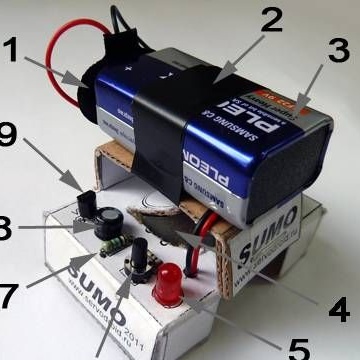
Paveiksle roboto komponentai pažymėti skaičiais:
1. Akumuliatoriaus prijungimo spaustukas.
2. Baterijos užraktas.
3. Maitinimas (9 V baterija).
4. Variklis.
5. Mirksintis šviesos diodas (rodo, kad maitinimas yra prijungtas).
6. Mygtukas robotui įjungti.
7. Rezistorius, jo dėka galite nustatyti roboto laiką.
8. Kondensatorius, jis taip pat atsakingas už roboto laiką.
9. Tranzistoriaus tipas KP505A, jis yra variklio vairuotojas.
Roboto surinkimo procesas:
Pirmasis žingsnis. Mes parengiame bylą
Norėdami pagaminti atvejį, autorius naudoja gofruotą kartoną, jums pagal jį reikia pritaikyti kontūrą. Šabloną galima atspausdinti ant spausdintuvo, jis pridedamas prie straipsnio. Be to, padarius reikiamas raukšles, piešinį galima pjaustyti išilgai storų linijų. Norėdami įdiegti variklį, turite iškirpti puslankiu kartone, tada šiek tiek sulenkti, kaip nurodyta nuotraukoje.
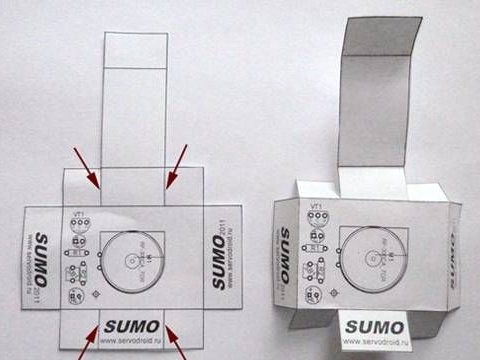


Antras žingsnis Radijo elementų įrengimas
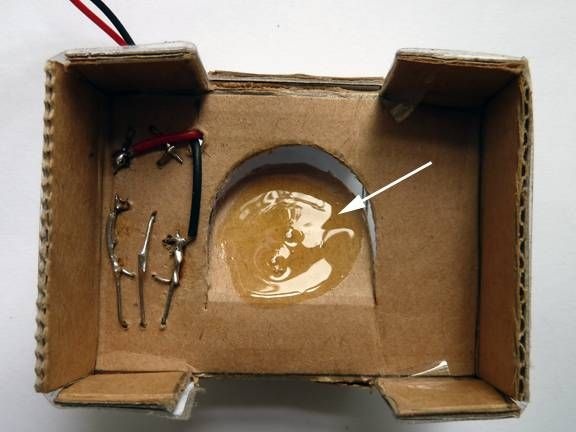
Kitame etape turite įdiegti visus reikalingus radijo elementus. Norėdami tai padaryti, turite paimti įpjovą ir padaryti skylutes kartone, jas reikia padaryti apvaliomis žymėmis. Norėdami pritvirtinti komponentus, įdiegę jų išvadas reikia šiek tiek sulenkti. Taip pat galite pamatyti ženklą žvilgsnio pavidalu ant kartono, čia reikia padaryti didelę skylę, pro ją praeis maitinimo laidas.
Po to galite pasiimti lituoklį ir pradėti jungti radijo elementų kontaktus pagal schemą.





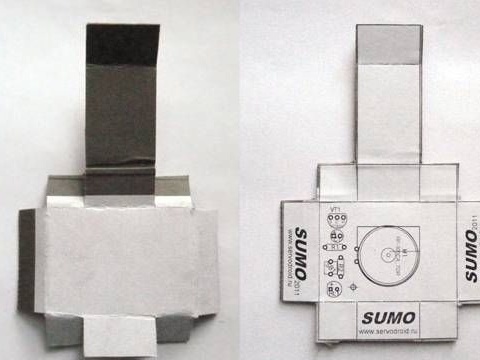
Trečias žingsnis Mes pritvirtiname apatinius šoninius paviršius
Šiame etape galima sujungti apatinius šoninius paviršius. Norėdami tai padaryti, turite sulenkti apatines plokštumas ir tada pritvirtinti juos permatoma juosta. Taip pat nuotraukoje galite pamatyti pakreiptus dėklo elementus, jie reikalingi akumuliatoriui pritvirtinti.


Ketvirtas žingsnis Prijunkite periferinius įrenginius
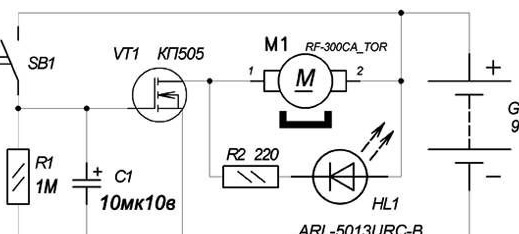
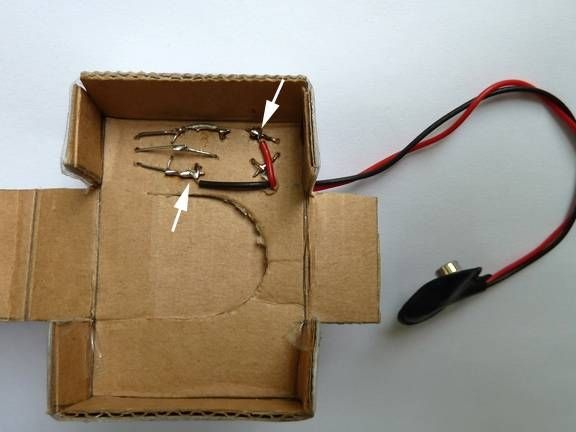
Norėdami prijungti maitinimą prie akumuliatoriaus, turite naudoti spaustuko jungtį. Viela turi būti pravesta per skylę, raudona - lituojama iki teigiamo šviesos diodo kontakto, o juoda - iki kondensatoriaus C1 minuso.
Tada jums reikia sujungti kairįjį ir dešinįjį šoninius paviršius, dėl to turėtų būti gaunama raidė "P". Norint patikimai pritvirtinti elementus, naudojamas kabių laikiklis. Kur reikia montuoti laikiklius, nurodoma balta rodykle. Spaustukus galima užsegti replėmis.


Penktas žingsnis Įdėkite ir prijunkite variklį
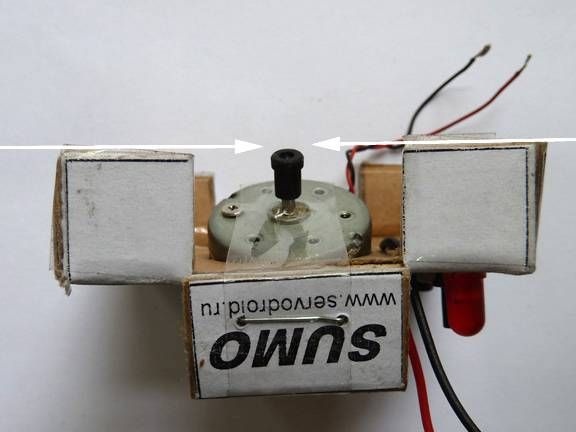
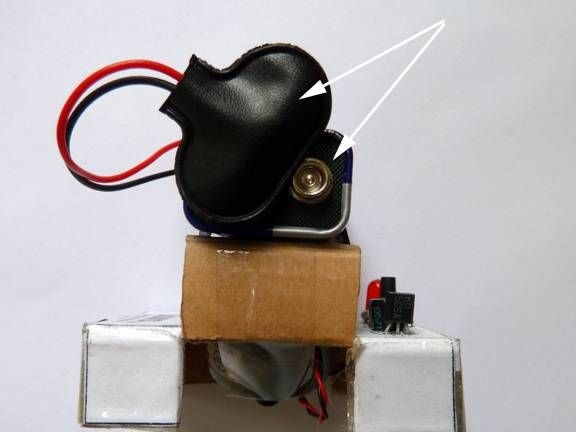
Kad robotas judėtų tiesiai, jo velenas turi būti tam tikru kampu paviršiaus atžvilgiu. Kitaip tariant, robotas stovės ant šoninių dalių, o jo velenas liečiasi tik su paviršiumi. Norint, kad roboto velenas gerai sukibtų, reikia ant jo užklijuoti elastinę juostą, tai gali būti cambrika arba guminis laikiklis iš helio rašiklio.
Variklis sumontuotas ant klijų, tepimo vieta pažymėta balta rodykle. Pritaikius klijus, reikia šiek tiek palaukti, kol jis taps klampus, kitaip skysti klijai gali patekti į variklį ir jį sugadinti.
Papildomam fiksavimui variklis apvyniotas juostele.


Kalbant apie roboto kampą, visa tai aiškiai matosi paveikslėliuose. Po montavimo variklį reikia prijungti. Vienas kaištis yra prijungtas prie minuso, o kitas - prie tranzistoriaus VT1 kanalizacijos.


Šeštas žingsnis Paskutinis surinkimo etapas
Akumuliatorius montuojamas ant U formos rėmo, akumuliatorius tvirtinamas elektrine juostele. Rėmas yra apgalvotas taip, kad be atramos, tai yra ir akumuliatoriaus amortizatorius. Jei robotą reikia visiškai atjungti nuo maitinimo šaltinio, galite atjungti vieną laidą nuo akumuliatoriaus.
Na, pabaigai: varžyboms jums reikia žiedo, jis pagamintas iš dviejų sluoksnių, kurio storis ne mažesnis kaip 3 mm. Jei šios sąlygos nebus laikomasi, robotas negalės sustoti ties žiedo kraštu. Žiedo skersmuo turėtų būti 250 mm. Apatinį sluoksnį sudaro plonas gofruotas kartonas, o viršutinį - iš juodo plono kartono. Abu sluoksnius reikia klijuoti kartu. Surinkimas baigėsi, galite pradėti varžybas. Laimėtojas yra robotas, likęs žiede.