Švietimo metu autorius žaidė žaidimus su akselerometro palaikymu savo telefone. Jam labai patiko vairuoti automobilį telefonu tiesiog pakreipus, o tada jis pradėjo svajoti, kaip realiame gyvenime gaminti automobilį su tokia pačia kontrole. Dabar turiu Arduino ir įgijęs programavimo įgūdžių, atėjo laikas sukurti valdomą aparatą „Android“, jis pavadino jį „Hercules“.
Šį vardą ji gavo dėl didžiulio sukimo momento ir didelio greičio. Modelis gali būti valdomas naudojant „Android“ telefoną per „Bluetooth“. Bet kuris telefonas su šia operacine sistema yra tinkamas valdyti, autorius neriboja vieno nuotolinio valdymo pulto. Taip pat, naudodamiesi telefonu, sutaupysite pinigų, nes nereikėjo leisti pinigų kuriant nuotolinio valdymo pultelį.
Medžiagos ir įrankiai:
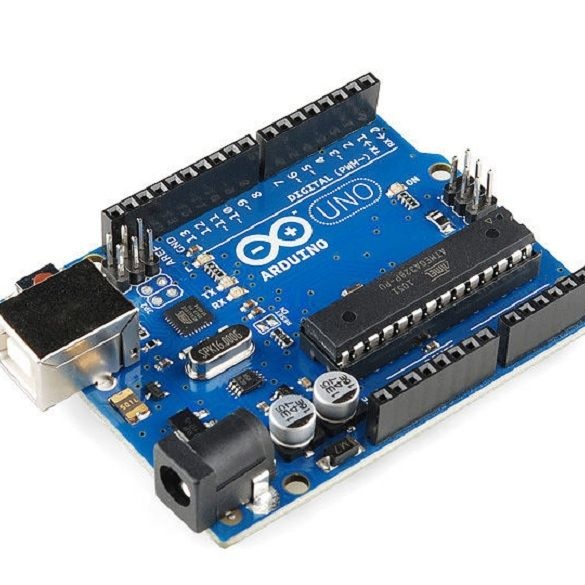
- Arduino Uno
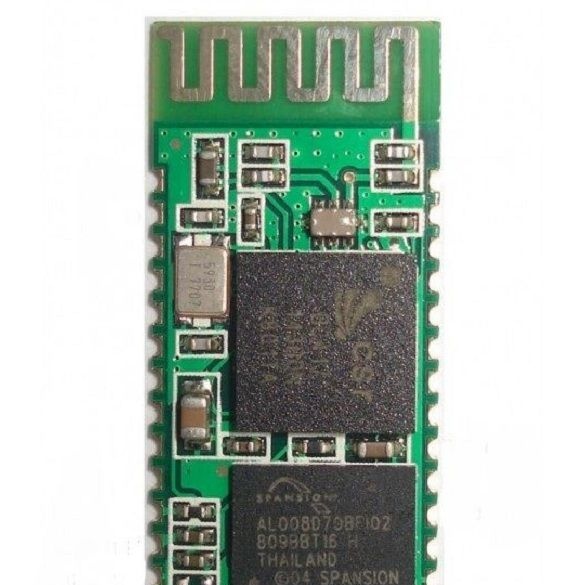
- „Bluetooth“ siųstuvas
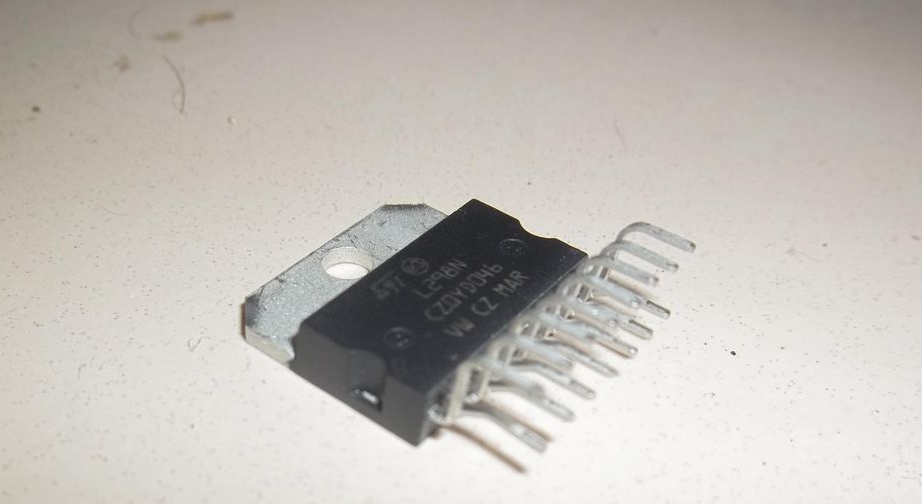
- Dviejų variklių vairuotojas (su L298 H tiltu)
- Varikliai su krumpliaračiais 4 vnt (galia parenkama atsižvelgiant į mašinos pritaikymą)
- Ratai 4 vnt
- 1Ah akumuliatorius SLA 12V
- komponentų pagrindas (važiuoklė)
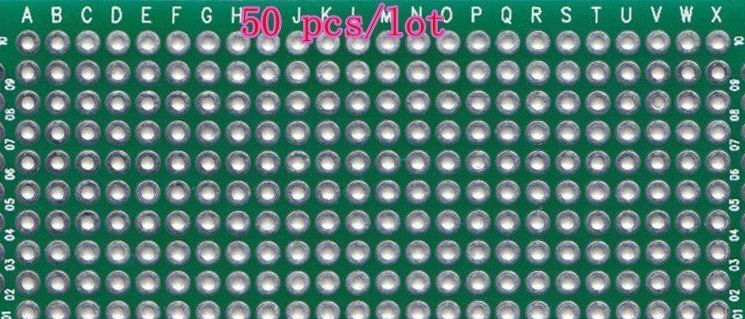
- bandelė
- dėžutės būstui laikyti 4 vnt
- SPST jungiklis
- Arduino jungiamieji laidai
- Litavimo laidai
- Mažo dydžio veržlės ir varžtai
- Rezistorius 10 kOhm 1 vnt
- Rezistorius 20 kOhm 1 vnt
- „Android“ telefonas
- lituoklis
- litavimas
- litavimo pasta
- gręžti





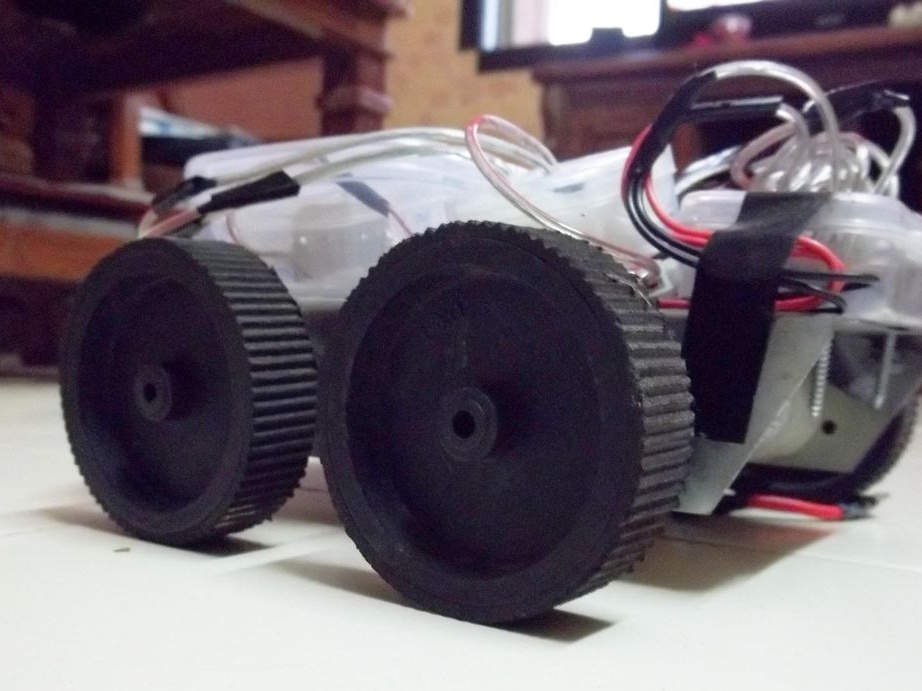
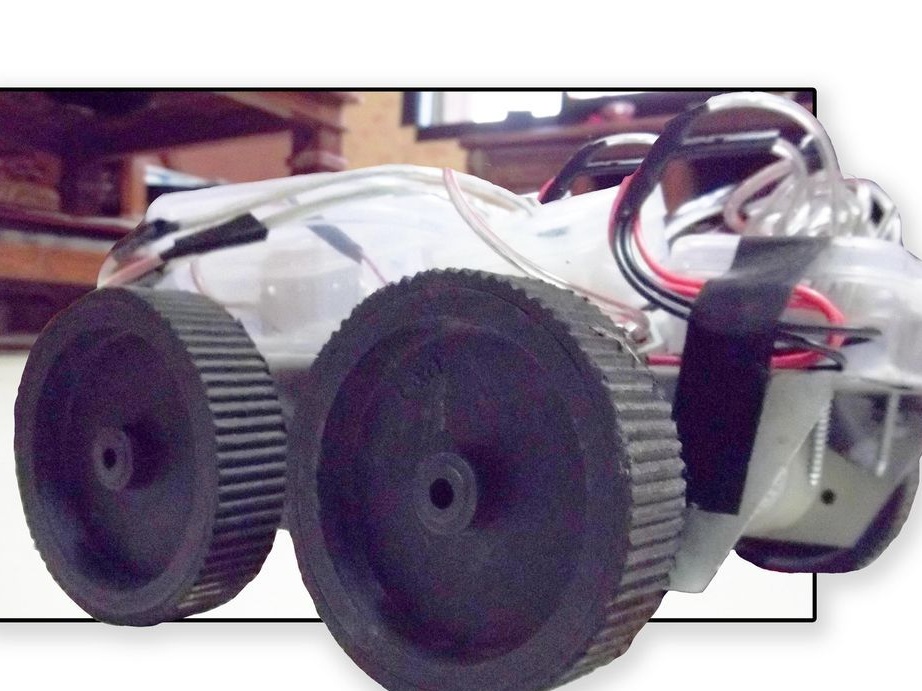
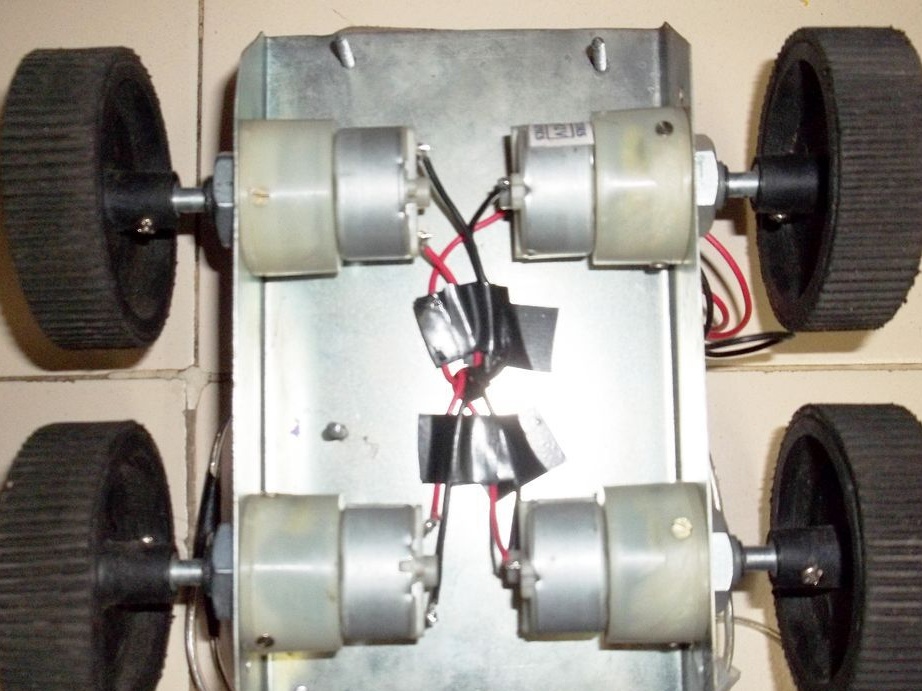
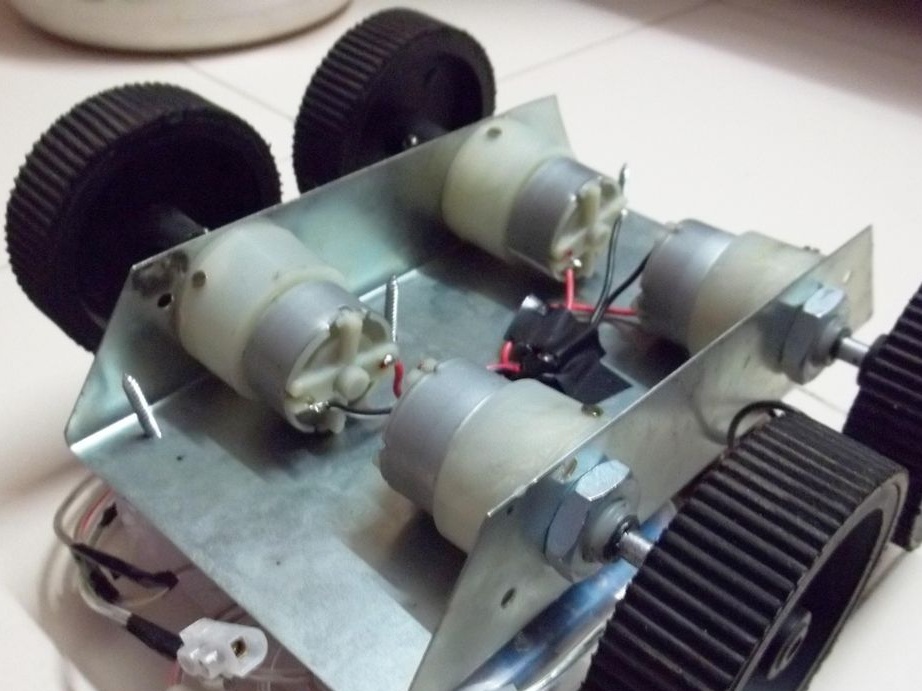
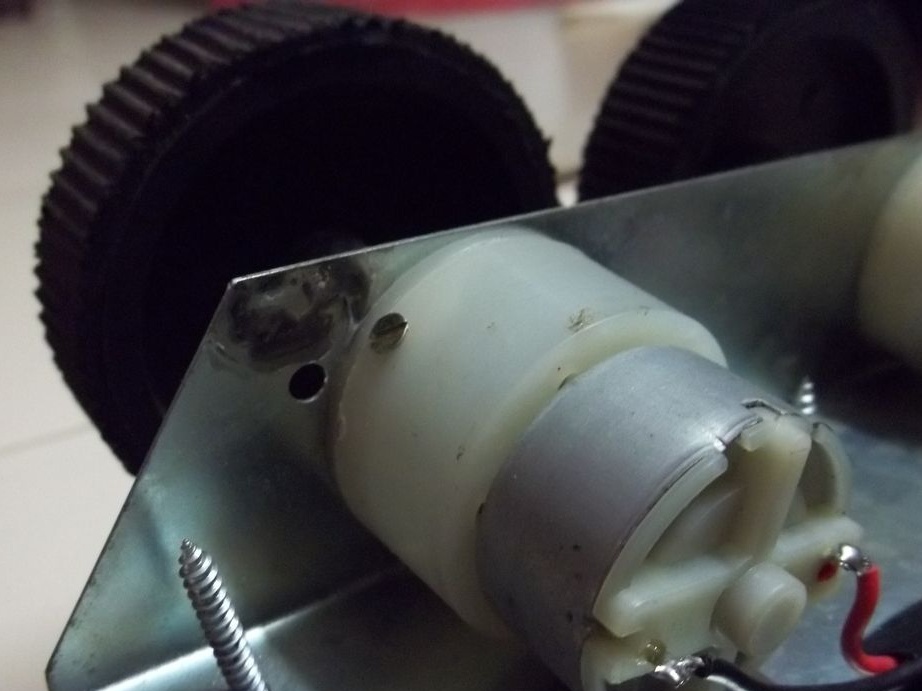
Pirmasis žingsnis. Ratai ir važiuoklė.
Variklio varžtais buvo lengva juos pritvirtinti prie važiuoklės veržlėmis. Ratai montuojami iki galo iki variklio veleno. Du dešinieji varikliai įjungiami lygiagrečiai vienas su kitu, taip pat du kairieji. Kaip važiuoklė atrodo sumontavus keturis ratus ir variklius, galite pamatyti žemiau esančioje nuotraukoje.
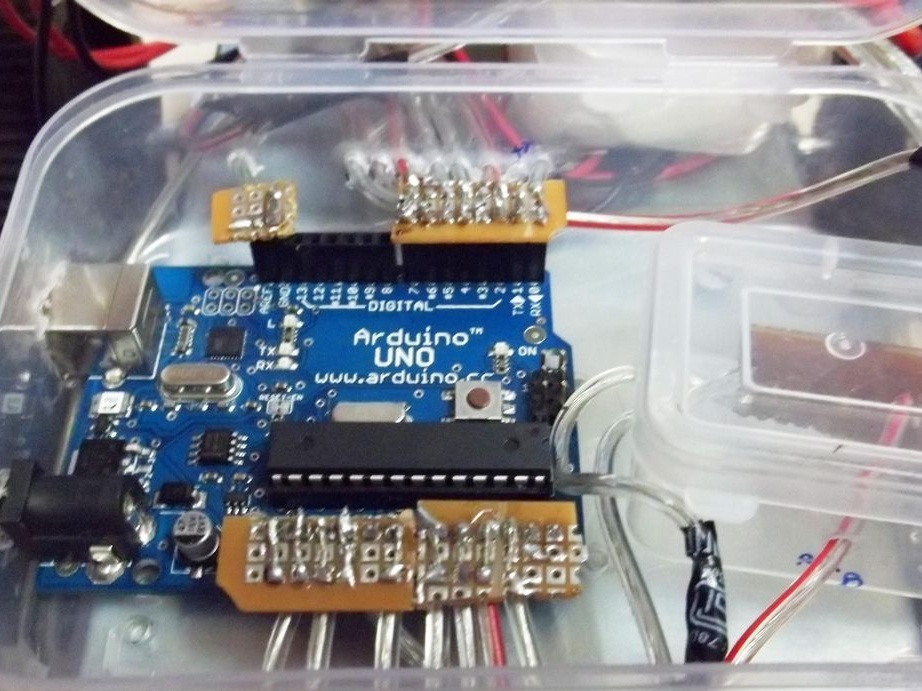
Antras žingsnis Būstas Arduino.
Arduino atvejo schema yra padalinta į kelias dalis. Toks modulinio dizaino sprendimas padės ateityje palaikyti grandinę arba pašalinti galimą gedimą. Jei vienas iš komponentų sugenda ar sudegina, jį galima greitai pakeisti ir nesugadinant konstrukcijos. Arduino dėžutė buvo sukurta taip:
- Iš duonos lentos buvo supjaustytos keturios dalys, dvi iš jų turėjo 8x3 skyles, antrosios dvi dalys - 6x3.
- BLS kaiščiai buvo pritvirtinti prie kiekvienos lentos išilgine puse.
- Kiekvienas kaištis ant duonos lentos buvo papildomai lituojamas maždaug 10 cm ilgio laidais. Tai buvo padaryta taip, kad laidai nenukristų nuo Arduino, nes dabar krovinys pradėjo būti paskirstytas tolygiai.
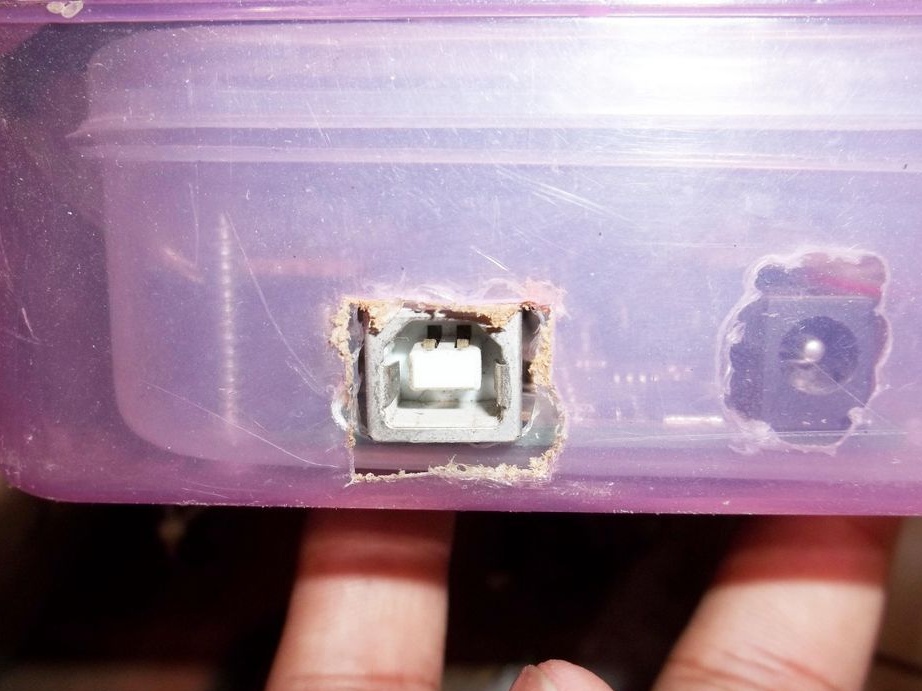
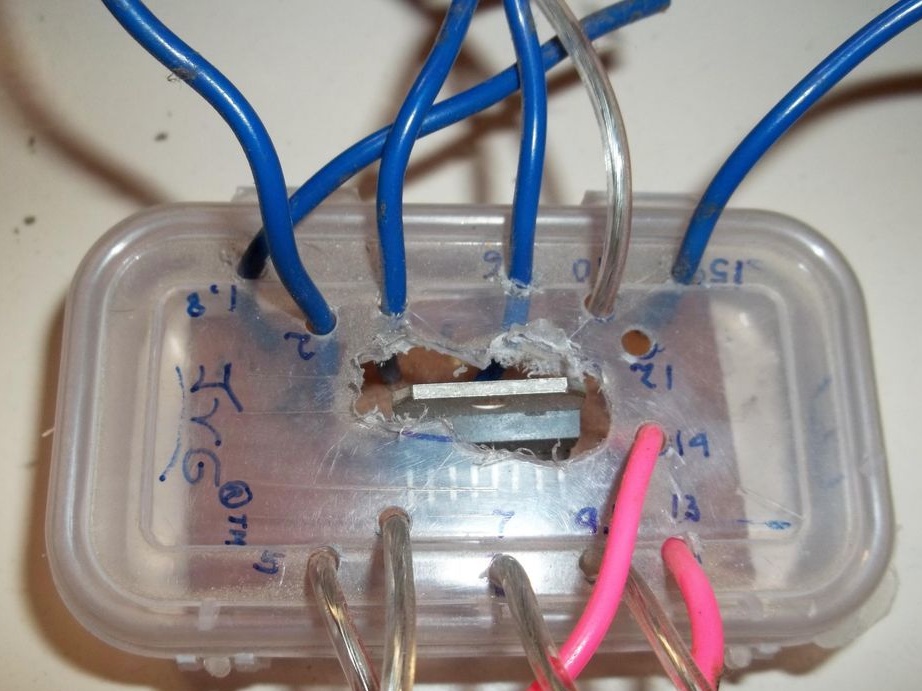
- Toliau „Arduino“ plokštė buvo dedama į dėklą taip, kad USB išvestis palietė sieną. Šiam išėjimui buvo išpjauta skylė, tai padės į mašiną įkelti papildomų programų arba ištaisyti esamas. Dėžutės šonuose buvo išpjautos skylės laidams, kurie eitų iš lentos. Dėžutės apačioje, po „Arduino“ tvirtinimo jungtimis, buvo iškirstos papildomos skylės.


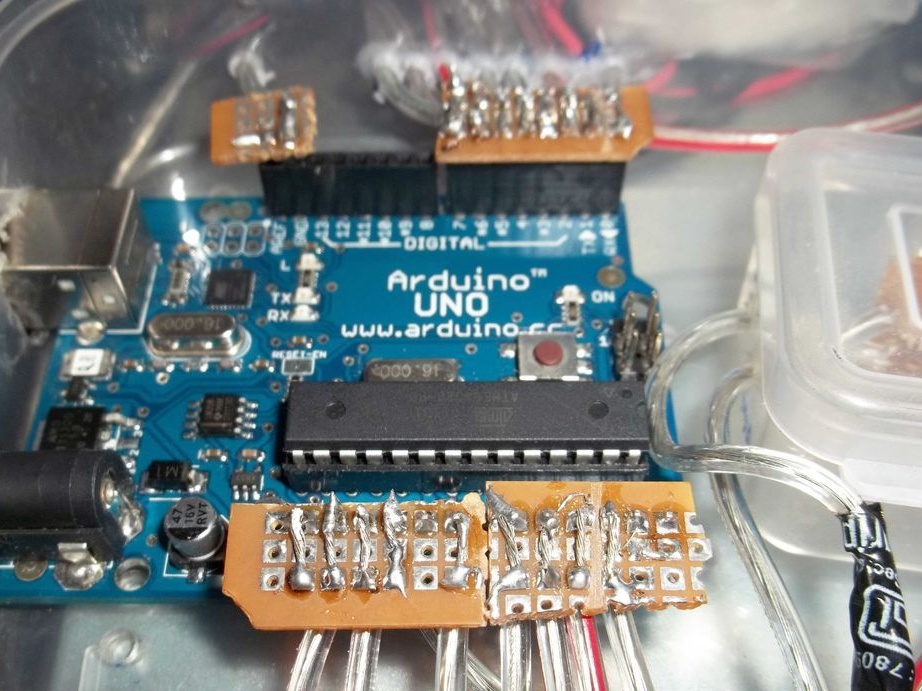
Trečias žingsnis „Bluetooth“ siųstuvas.
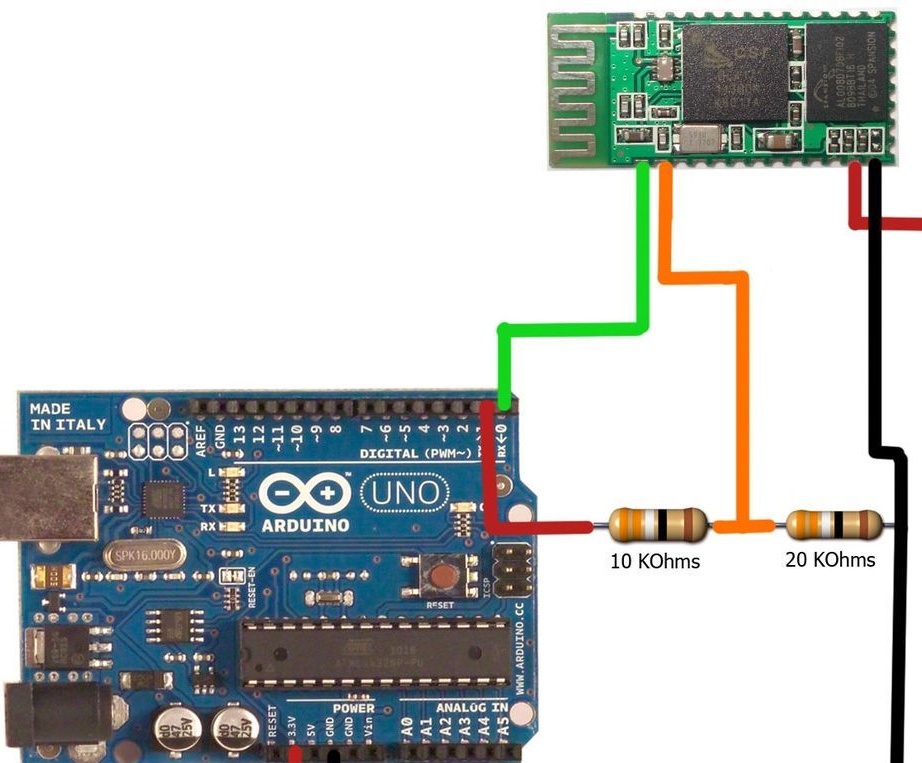
Laidų litavimas į „Bluetooth“ siųstuvą-imtuvą yra pati sunkiausia užduotis montuojant šį projektą, autoriui litavimo metu tikrai trūko trečios rankos. Naudoti keturi 10 cm ilgio laidininkai, jie buvo lituojami prie kaiščių 1 (Tx), 2 (Rx), 12 (+ 3,3B) ir 13 (GND). Dabar siųstuvą-imtuvą galima buvo įstatyti į korpusą su iš anksto paruoštomis skylėmis laidams. Autorius klijavo laidus prie dėžutės, kad laidai nenuplėštų kontaktų.



Ketvirtasis žingsnis. Korpuso varžai.
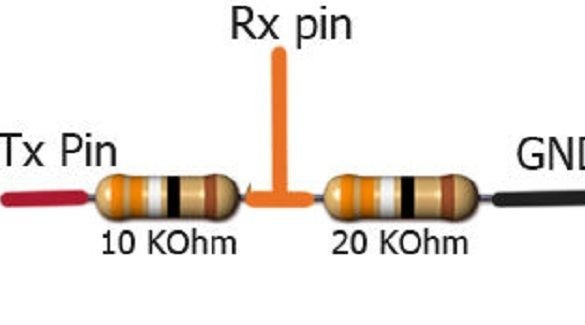
Dėl to, kad „Arduino Tx“ išėjimas siunčia signalą, kurio įtampa yra 5 V, o „Bluetooth“ modulis veikia su 3,3 V įtampa, reikėjo 5 V konvertuoti į 3,3 V. Šiai užduočiai autorius panaudojo įtampos daliklį. Pagal žemiau pateiktą schemą jis litavo rezistorių prie likusio duonos lentos gabalo. Žinoma, šią grandinę buvo galima pastatyti į Arduino korpusą, tačiau vietos nebuvo pakankamai, todėl autorius padarė atskirą varžoms.


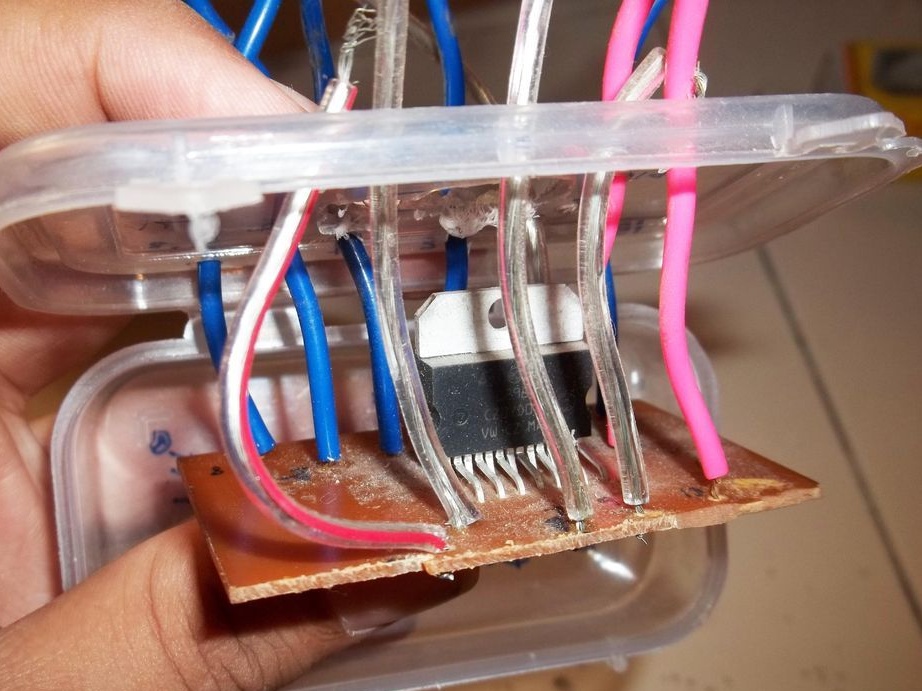
Penktas žingsnis Variklio vairuotojas.
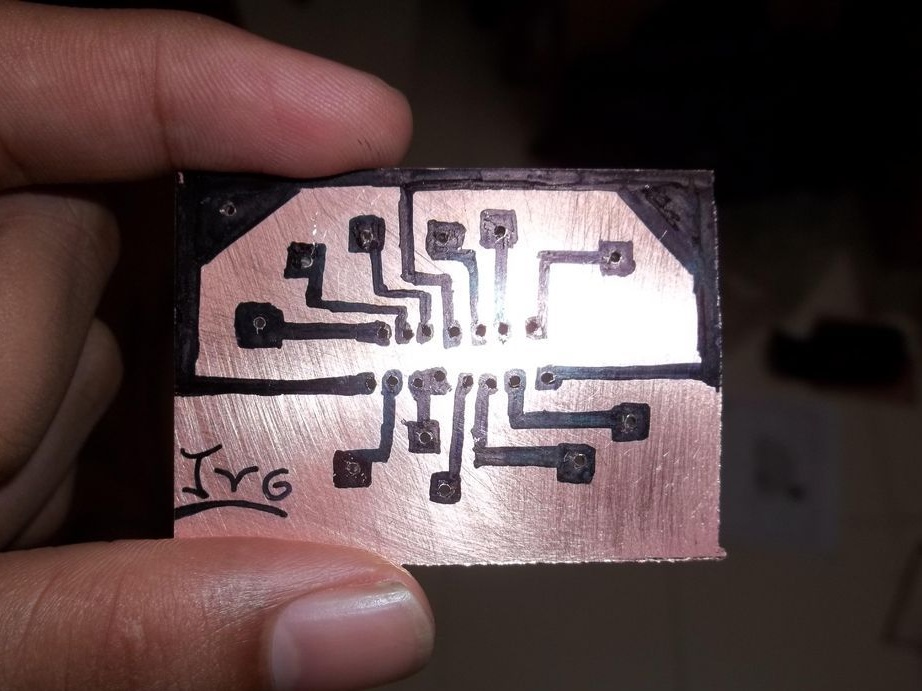
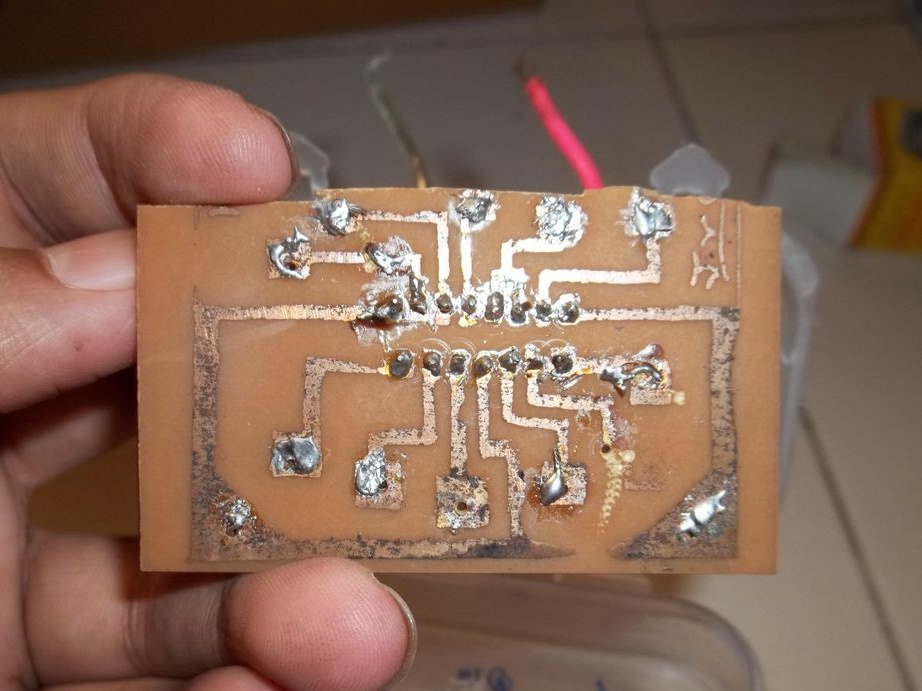
Autorius naudoja dvigubą vairuotoją su „H-bridge L298 IC“, jis valdo keturis variklius. Jam autorius sukūrė lentą, kad būtų lengviau lituoti prie jo, pati lenta žemiau esančioje nuotraukoje. Po litavimo vairuotojas taip pat buvo dedamas į atskirą dėklą su skylėmis laidams.
Šeštas žingsnis Galutinis susirinkimas.
Kiekvienas atskiras komponentas yra prijungtas prie Arduino pagal schemą.
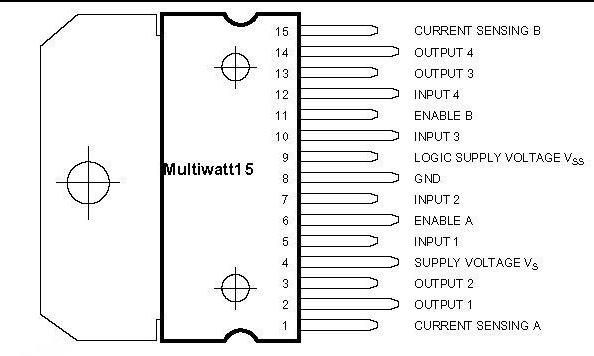
Variklio vairuotojo sujungimas su Arduino įvyko pagal šį planą:
1 prie GND
2 prie pirmojo kairiųjų variklių kontakto
3 prie antrojo kairiųjų variklių kontakto
4 iki 12 V baterijos
5 prisegti Arduino 2
6 prie smeigtuko Arduino 3
7 prisegti Arduino 4
8 į GND
Nuo 9 iki 5 V su Arduino
10 prisegti Arduino 5
11 prisegti Arduino 6
12 prie smeigtuko „Arduino 7“
13 iki pirmojo dešinių variklių kontakto
14 prie antrojo dešinių variklių kontakto
15 į GND
12 V maitinimas buvo prijungtas prie Vin Arduino kaiščio ir L298 4 kaiščio. GND Arduino atitinkamai į GND maitinimo šaltinį.
Septintas žingsnis. Programa „Arduino“.
Kad programa veiktų tinkamai, reikėjo įdiegti „Amarino“ biblioteką, kurią galima atsisiųsti. „Arduino“ šaltinio kodą galite atsisiųsti pagal straipsnį.
Aštuntas žingsnis. Programinė įranga, skirta „Android“
„Amarino“ biblioteka yra įrankių rinkinys darbui su „Android“ išmaniaisiais telefonais. Įdiegę papildomą programą savo telefone, galėtumėte pradėti rašyti programą.
„Amarino“ programą ir papildinį galima atsisiųsti iš. Įdiegę juos telefone, liko tik įjungti aparatą ir prie jo prisijungti bei pasirinkti skyrių Pridėti įvykius-> Akselerometro jutiklis.
Vaizdo įrašas su „Amarino“ ir jo papildinių diegimu:
Mašinos greitis yra lygus telefono stiprumui. Jei mašina juda neteisinga kryptimi, turite pakeisti variklių laidus.