

Pultoidais vadinami tokie robotai, kuriuos galima valdyti nuotoliniu būdu naudojant nuotolinio valdymo pultą. Pavyzdžiui, šiems tikslams gali būti naudojamas TV nuotolinio valdymo pultas. Pagrindinė užduotis, kurią autorius iškėlė sau gamindamas tokį robotą, yra jo surinkimo paprastumas. Svarstoma robotas nereikalauja spausdintinės plokštės gamybos, montavimas yra labai paprastas ir tiesiog vyksta ant kartono.

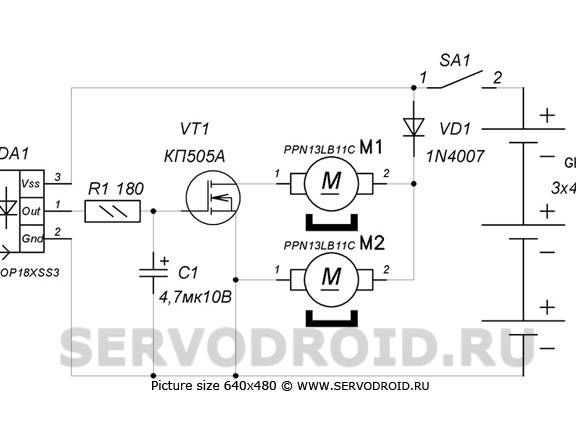
Elektroninis Roboto grandinę sudaro tik keturi komponentai: diodas, tranzistorius, fotodetektorius ir kondensatorius. Gaminant mechaninę dalį taip pat reikės mažiausiai medžiagų, pavyzdžiui, dėklui gaminti naudojamas kompaktinis diskas.
Tokiu būdu pagamintas robotas supras tik vieną komandą. Verta paspausti bet kurį valdymo pulto mygtuką, o robotas pradės suktis. Jei ir toliau laikysite mygtuką, sukimosi kampas taps didesnis, dėl to robotas gali pasisukti 360 laipsnių.
Roboto prietaisas
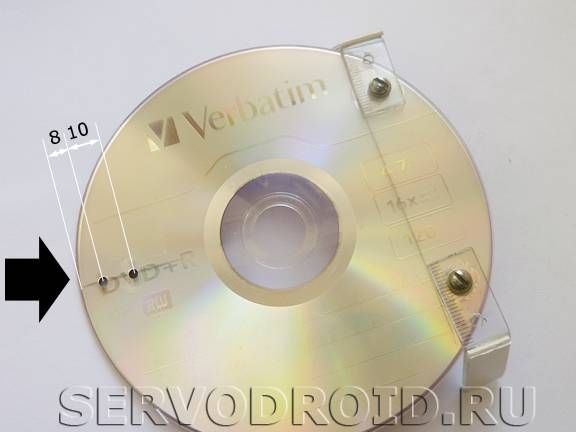
Roboto gamyboje naudojamas kompaktiškas diskas. Kalbant apie maitinimo elementus, jie pritvirtinami varžtais M2. Elektroninė plokštė, taip pat baterijų skyrius, pritvirtinama juostele.
Kalbant apie variklius, jie yra išdėstyti kampu, o jų velenai remiasi į kelią. Taigi nereikia atskirai gaminti ratų. Varžtai tvirtinami rėmais, pagamintais iš mokyklinės linijos.
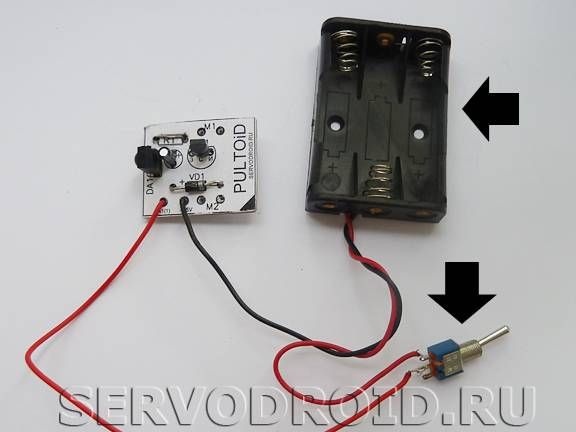
Trys „mažojo piršto“ akumuliatoriai maitina robotą, jie įmontuojami specialiu atveju. Iš viso maitinimo šaltinis sukuria 4,5 V.
Galiausiai, fotodetektorius, čia yra tik vienas, tai yra TSOP tipas. Jis priima moduliuotus signalus iš bet kurio nuotolinio valdymo pulto, kurio dėka robotas gali būti valdomas.
Gamybos medžiagos ir įrankiai:
- nailoniniai kaklaraiščiai;
- fotodetektoriaus tipas TSOP1836;
- vieno lauko efekto tranzistorius (KP505A);
- kompaktinis diskas;
- užpildytas akumuliatoriams iš trijų dalių;
- trys „maži“ akumuliatoriai;
- plastikinė liniuotė;
- varžtai rėmui pritvirtinti;
- laidai ir jungikliai (perėjimo tipas).
Gamybos procesas:
Pirmasis žingsnis. PCB dizainas
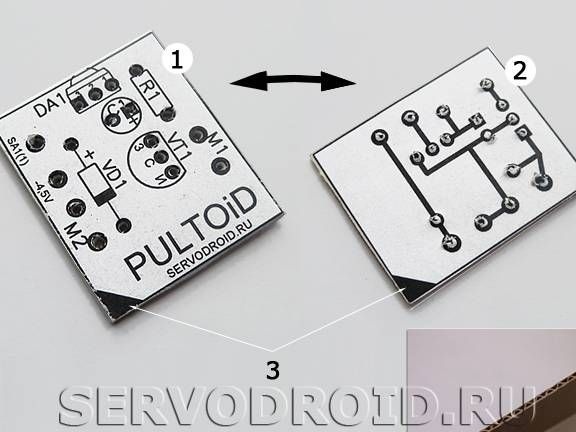
Norėdami pagaminti spausdintinę plokštę, pirmiausia turite atspausdinti piešinį ant popieriaus. Turėtumėte gauti du paveikslėlius, ant vieno diegimo brėžinio ir iš kitos plokštės pusės. Iš viso lentą sudarys trys elementai, centre bus gofruotas kartonas, iš abiejų pusių suklijuotas biuro popieriumi. Norėdami klijuoti lentą, rekomenduojama naudoti sausą klijų lazdelę.
Antras žingsnis Radijo komponentų montavimas
Diegdami elektroninius komponentus, svarbu nepamiršti ir nenupjauti kontaktų išsikišančių kraštų. Vėliau jie bus sulenkti, taigi bus sukurta elektros grandinė. Visi elementai yra sujungti litavimo būdu pagal nurodytą schemą.
Rezistorius R1 grandinėje turi būti pakeistas bet kokiu trumpikliu. Kaip fotodetektorius, teisinga jo prijungimo tvarka taip pat parodyta nuotraukoje.

Trečias žingsnis Maitinimo rėmo montavimas
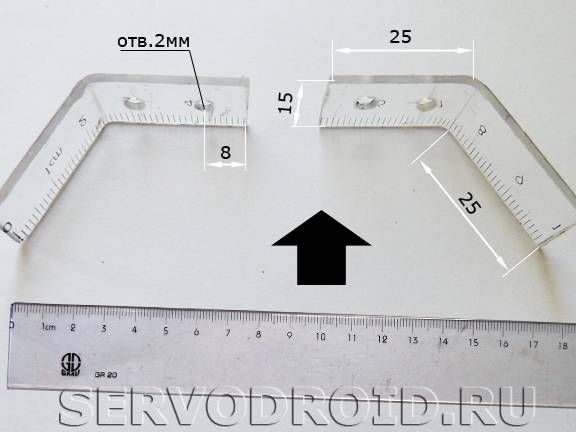
Norėdami įdiegti variklius, turėsite sukurti galios rėmą. Kaip medžiaga čia bus naudojama plastikinė mokyklos liniuotė. Jis turi būti supjaustytas į dvi dalis ir sulenktas, kaip nurodyta nuotraukoje. Kad liniuotė pradėtų lenktis, reikia nuvesti karšto litavimo geležies antgalį maždaug 2 mm atstumu į įlinkio vietą. Taip pat šiais tikslais galite naudoti statybinius plaukų džiovintuvus. Liniuotę reikia sklandžiai sulenkti maždaug 30 laipsnių kampu.

Sukūrę rėmelį, galite tęsti jo diegimą. Norėdami tai padaryti, paimkite kompaktinį diską ir 2 mm varžtus su veržlėmis. Be to, tinkamose vietose gręžiamos mažiausiai dviejų milimetrų skersmens skylės, o rėmas tvirtinamas varžtais. Kad rėmas neslystų, prieš jį montuodami, ant disko turite klijuoti dvipusę juostą.
Ketvirtas žingsnis Priekinės atramos montavimas
Disko priekyje turite išgręžti dvi skylutes ir paruošti nailono lygintuvą. Grindų dydis turėtų būti 3x150mm. Jis turi būti įdėtas, kaip nurodyta nuotraukoje. Dėl to gauta atrama roboto veikimo metu puikiai nusidėvi ir slysta keliu.


Penktas žingsnis Variklio montavimas
Norint, kad variklio velenai neslystų keliu, ant jų reikia uždėti apsaugas. Jie gaminami iš dervos, kurią galima rasti ant helio rašiklių pastų. Norėdami įdiegti variklius, pirmiausia turite priklijuoti dvipusio juostos gabalą prie atramos, tai padės išvengti slydimo. Na, tada varikliai galutinai pritvirtinami nailoninėmis juostelėmis.

Šeštas žingsnis Jungiklis ir maitinimo šaltinio jungtis
Kaip energijos šaltinį galite naudoti bet kurią bateriją, kurios srovė neviršija 5 voltų. Šiuo atveju naudojamas trijų pirštų akumuliatorių dėklas, kurių bendra 4,5 V įtampa.
Kalbant apie jungiklį, jis sumontuotas ant teigiamo kontakto, gaunamo iš energijos šaltinio, tarpo. Raudona viela yra pritvirtinta prie plokštės, kad pritvirtintų SA1 (1), o juoda viela, kad pritvirtintų -4,5 V.


Taip pat šiame etape galite prijungti variklius, jų laidai yra prijungti prie kontaktų M1 ir M2.
Septintas žingsnis. Paskutinis etapas
Paskutiniame etape reikia sutvarkyti visus elektroninius elementus. Jie pritvirtinami prie disko, naudojant dvipusę juostą. Kalbant apie jungiklį, jį taip pat reikia pritvirtinti, tam galite naudoti karštus klijus.

Viskas, dabar robotas yra paruoštas. Galite pabandyti jį įjungti ir duoti komandą įjungti naudodami bet kurį nuotolinio valdymo pultą.