

Tokių robotas jau buvo sukurtas ir vadinasi „pasidaryk pats“: „LightBot“. Be to, jį rinkti gali bet kas, visus kūrimo elementus galima lengvai rasti, o robotas bus surinktas gana paprastai. Šio tipo robotai nuolatos eis tamsoje paskui savininką ir paryškins jį reikiamoje vietoje, todėl nebereikia laikyti žibintuvėlio rankose. Robotas bus stebimas savininko dėka infraraudonųjų spindulių jutiklio, pritvirtinto prie savininko kojos.
Medžiagos ir įrankiai robotui sukurti:
1. Infraraudonųjų spindulių švyturys. Tokį įrenginį sudarys keturi infraraudonųjų spindulių šviesos diodai, juos galima rasti nuotolinio valdymo pulte iš televizoriaus.
2. Du ratai iš „K'nex“ komplekto arba vaikų žaislai.
3. Du maži varikliai (juos galima rasti vaikų žaisluose).
4. Du infraraudonieji tranzistoriai, tokie kaip NPN arba fotorezistorius. Infraraudonųjų spindulių fototransistorius nėra sunku nusipirkti.
5. Trys AA akumuliatoriai ir vienas 9 voltų.
6. PVC vamzdis.
7. Karšto lydalo klijai.
8. Vienkartinės plastikinės šakutės.
Roboto gamybos procesas:
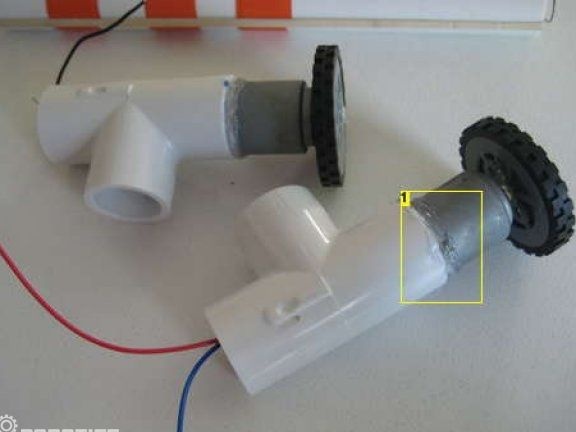
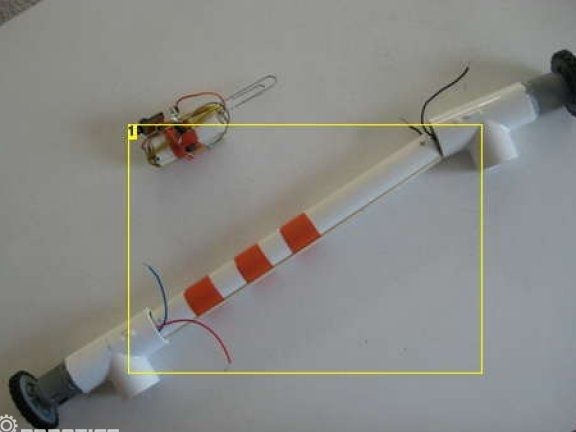
Pirmasis žingsnis. Variklio montavimas
Pirmiausia turite įdiegti variklius. Jų montavimui naudojami plastikiniai trišakiai, kurie uždedami ant pagrindinio vamzdžio. Varikliai tvirtinami karšto lydalo klijais. Čia nereikia gailėtis dėl klijų. Taip pat šiame etape ratus galima dėti ant variklių ašies. Kad jie tvirtai laikytųsi, juos taip pat galima pritvirtinti karšto lydalo klijais.
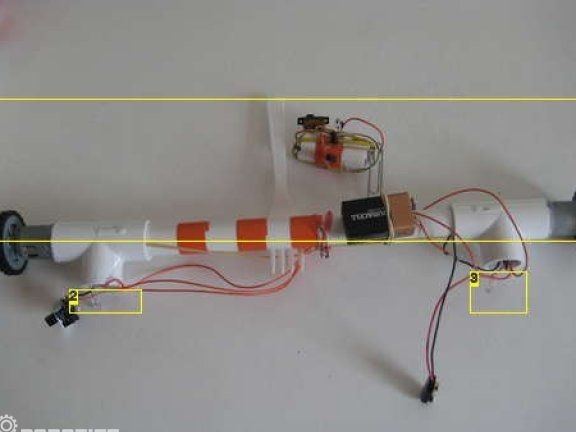
Antras žingsnis Diegiant fotorezistorius
Norint stebėti infraraudonąjį švyturį, reikalingi fotorezistoriai. Jie bus savotiškos roboto akys. Priklausomai nuo to, kuria kryptimi išeis šviesa, robotas pagreitins vieną iš variklių, kad pasisuktų teisinga kryptimi.
Šviesos varžai yra pritvirtinti prie „trišakių“ vietose, pažymėtose skaičiais 2 ir 3. Šiose vietose jie gali būti pritvirtinti trijų klijų klijais.
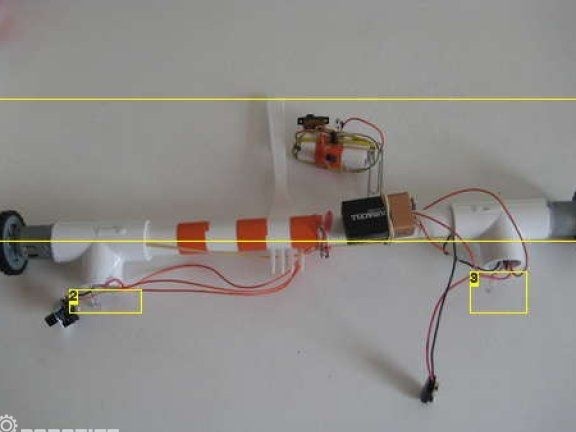
Trečias žingsnis Maitinimo šaltinio įrengimas
Iš viso robotas veikia dviem energijos šaltiniais. Tai yra trys AA akumuliatoriai ir viena 9 voltų baterija. Pirštinių baterijos yra įmontuotos vamzdžio viduje.Na, „Krona“ tipo baterija yra pritvirtinta prie telefono iš išorės.
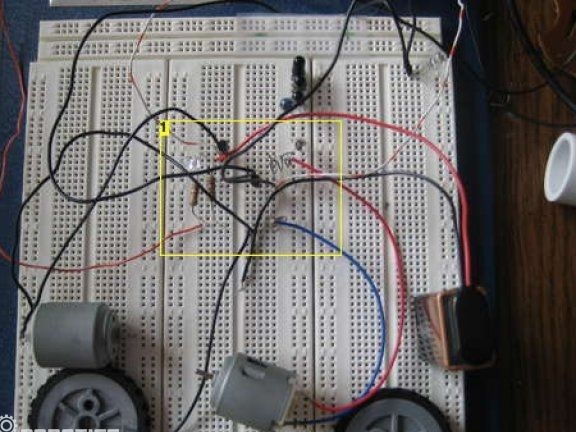
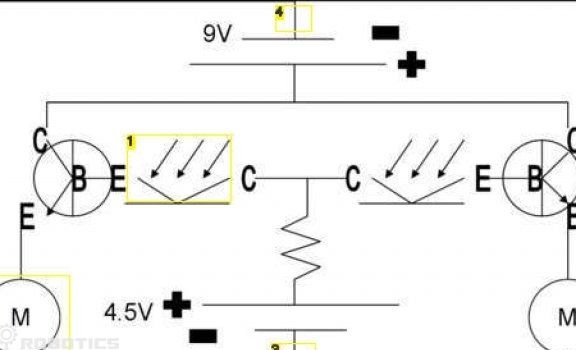
Ketvirtas žingsnis Roboto grandinė
Schema sudaryta taip, kad jei robotas mato radiaciją vienoje pusėje, tai pagreitina variklį iš priešingos pusės, taigi robotas sukasi. Norimas variklio greitis pasiekiamas eksperimentiškai keičiant rezistorius.
Kita grandinė gali būti papildyta jungikliu. Jis turi būti sumontuotas taip, kad nutrauktų roboto maitinimą.
Diagramoje skaičius 1 žymi fototranzistorių, 2 - variklio valdiklį, 3 - jungiklio įrengimo vietą, 4 - čia taip pat galite įdėti jungiklį.
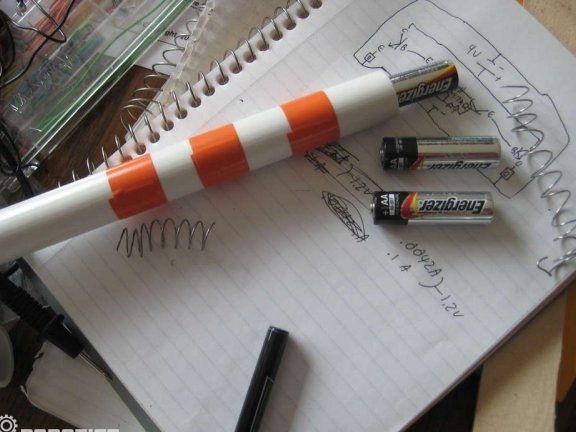
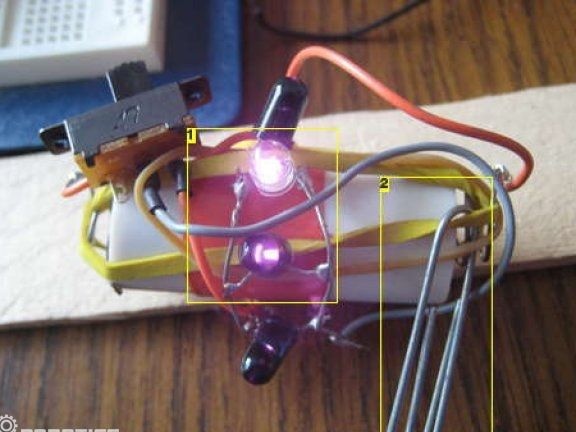
Penktas žingsnis Sukurkite IR švyturį
Norėdami sukurti infraraudonųjų spindulių švyturį, imamas trumpas polivinilchlorido vamzdelis, kuriame sumontuota viena AA baterija. Kontaktai palaikomi elastinės juostos dėka, o keturių infraraudonųjų spindulių diodų maitinimas valdomas jungikliu. Tokios šviesos neįmanoma pamatyti akimi, norint patikrinti diodų veikimą, juos reikia žiūrėti per skaitmeninį fotoaparatą. Švyturys pritvirtinamas įprastu popieriniu spaustuku prie kojos.
Šeštas žingsnis Paskutinis roboto surinkimo etapas
Dabar viską reikia sujungti, kaip parodyta diagramoje. Taip pat reikia surinkti mechaninę dalį, didžiausias dėmesys turėtų būti skiriamas fotorezistoriams, jie turi išsikišti, nes kitaip jie negalės pasiimti švyturio signalo. Dabar, įjungus robotą, reikia jį apeiti ir pamatyti, ką jis darys.
Žinoma, robotas gali neiti paskui savininką pirmą kartą, tačiau jūs neturėtumėte nusivilti, nes grandinę galima modifikuoti ir robotą sukonfigūruoti pagal poreikį. Anot autoriaus, ateityje programinę įrangą bus galima įdiegti robote, kurio dėka jis atpažins objektus ir žmones. Taip pat galite įdiegti daugybę skirtingų jutiklių ir paversti šį robotą aukštųjų technologijų prietaisu.