

Vibrobotai yra tokie robotaikad juda dėl vibracijos. Nepaisant to, kad jų dizainas yra gana paprastas, jie darbe yra ne mažiau įspūdingi nei techniškai sudėtingesni broliai. Toks robotas naudosis šereliais kaip varikliu, tai yra savotiškos jo kojos.
Straipsnyje aprašytas robotas gali savarankiškai pakeisti judėjimo trajektoriją ir pats apeiti kliūtis. Kaip eksperimentą autorius sukūrė du robotus, ant kurių buvo sumontuoti skirtingi energijos šaltiniai ir varikliai. Iš esmės nėra griežtų standartų, susijusių su naudojamomis medžiagomis, svarbiausia yra laikytis nurodytos schemos, renkant robotą.

Gamybos medžiagos ir įrankiai:
- 3x150mm dydžio nailoniniai kaklaraiščiai;
- juodos spalvos izoliacinė juosta;
- 9 voltų baterija (6F22);
- lazerinis diskas (CD ar DVD nesiskiria);
- apsauginis gaubtas;
- 9 voltų akumuliatoriaus jungtis;
- ekscentriškas (trinti).

Roboto gamybos procesas:
Pirmasis žingsnis. Sukurkite roboto pagrindą
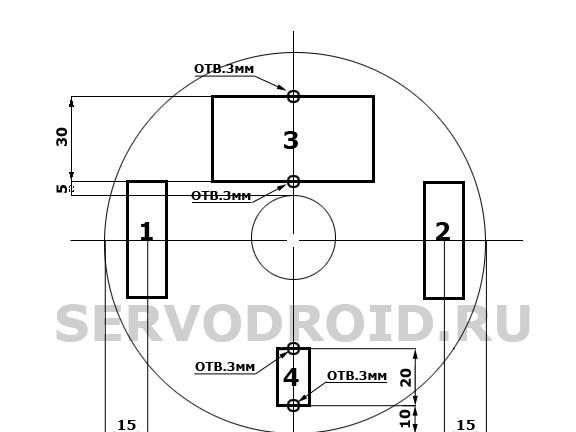
Kaip pagrindas robotui bus naudojamas įprastas kompaktinis arba DVD diskas. Atidarykite jame skyles pagal schemą, pateiktą nuotraukoje. Be išimties, visos skylės gręžiamos 3 mm grąžtu. Šis skersmuo yra gana pakankamas, jei naudojamas pritvirtinti nailono kaklaraiščius. Jei nuspręsite naudoti kitokį tvirtinimo būdą, tada skylės gali būti gręžiamos bet kokio kito dydžio. Siūlomas brėžinys tinka bet kokiam roboto surinkimui.
Skaičiai 1 ir 2 nurodo šepečių montavimo vietas, aikštėje yra sumontuota baterija su skaičiumi 3, o variklyje - 4.
Antras žingsnis Mes gaminame ir montuojame judesius
Varomosios jėgos dėka robotas judės. Norėdami juos padaryti, jums reikia paimti du dantų šepetėlius. Geriausia, kad šepetėliai būtų vienodi šerių aukščio ir formos. Jei forma skiriasi, ją galima pataisyti žirklėmis.
Dabar šeriai turi nustatyti kryptį. Tam paimama lipni juosta ir šeriai apvyniojami taip, kaip nurodyta nuotraukoje. Šioje padėtyje šepetėlį reikia laikyti maždaug valandą, kad šeriai prisimintų šią padėtį. Nuotraukoje pilka rodyklė nurodo šerelių pakreipimo kryptį.

Nustačius norimą formą, jums reikia nupjauti dalį šepetėliais nuo dantų šepetėlio. Tada jums reikia paimti klijų pistoletą ir įdiegti šerius į diską nurodytose vietose. Visas darbas turi būti atliekamas greitai ir tiksliai, nes karšti klijai greitai atvėsta ir sukietėja.Turite pabandyti šepečius sumontuoti taip, kad jie stovėtų lygiagrečiai vienas kitam.
Šepečių šeriai turi būti nukreipti atgal, kitaip tariant, į akumuliatorių esant 9 voltams. Veikimo metu robotas judės prieš šerelių kryptį, tai yra, akumuliatoriaus vieta bus roboto užpakalinė dalis.

1 - diskas, 2 - karšto lydymosi klijai, 3 - skylės varikliui montuoti, 4 - skylės akumuliatoriui montuoti. Baltos rodyklės rodo šerelių kryptį.
Trečias žingsnis Padaryti ekscentriku
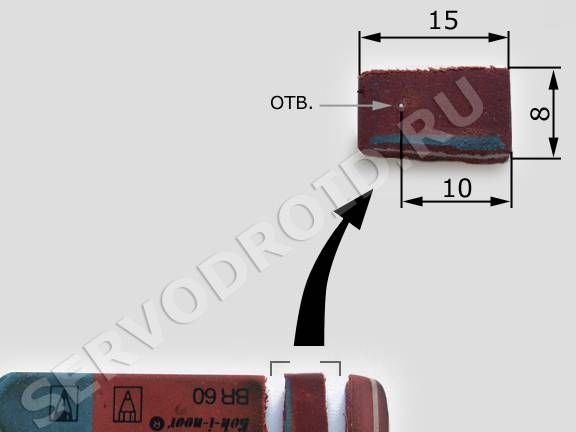
Norėdami gauti vibraciją, ant variklio veleno reikia uždėti ekscentriką, t. Y. Nesubalansuotą daiktą. Autorius ekscentriką padarė trintuku, nukirpdamas tinkamo dydžio gabalą. Padarykite skylę toje vietoje, kurią nurodo balta rodyklė. Jis neturėtų būti didelis, nes ekscentrikas nuslys nuo variklio veleno. Jis gali būti pagamintas adata.
Ketvirtas žingsnis Apsauginės dangos gamyba.
Kadangi vibraciją sukuria besisukantis trintukas, kad robotas galėtų dirbti, patartina apsaugoti šią vietą nuo įvairių objektų. Be to, tokia apsauga suteiks robotui įdomesnį vaizdą. Apsauginis gaubtas pagamintas iš popieriaus, kurį sudaro keli sluoksniai. Jūs turite pagaminti cilindrą iš popieriaus, jo dydis priklauso nuo variklio dydžio. Norėdami suteikti popieriui daugiau tvirtumo, jį galima sutepti klijais, todėl užtepkite dar kelis sluoksnius. Arba šiems tikslams galite naudoti kartoną.
Norėdami sukurti cilindro formą, variklis tiesiog apvyniojamas popieriumi viršuje.




Penktas žingsnis Galutinis roboto surinkimas
Variklis montuojamas konkrečioje vietoje, tada tvirtinamas nailono lygintuvu. Tokius lygintuvus galima nusipirkti parduotuvėse, kurių specializacija yra prekyba statybinėmis medžiagomis.
Baterija taip pat tiksliai pritvirtinta. Svarbu atsižvelgti į tai, kad akumuliatorius turi būti aiškiai nukreiptas į centrą, kitaip roboto trajektorija gali pasikeisti. Beje, tokiu būdu ateityje galima nustatyti judėjimo trajektoriją naminis.


Dabar tarp spaustuko ir variklio reikia įdiegti mažą jungiklį. Apibendrinant belieka prijungti spaustuko jungtį prie akumuliatoriaus ir jūs galite pradėti tikrinti robotą. Laidai yra sujungti spalva.
Tačiau naudojant „Kron“ akumuliatorių nebūtina įdiegti jungiklio, robotą galite įjungti prijungę jungtį.
Na, o antrajai roboto versijai galite paprasčiausiai išimti akumuliatorių iš įrenginio, tačiau, žinoma, jungiklis yra perspektyvesnis.
Viskas, robotas yra paruoštas, galite pradėti bandyti. Norėdami pasiekti norimą rezultatą, galite pabandyti pakeisti poliškumą, todėl variklis suksis priešinga kryptimi, o robotas elgsis kitaip.