
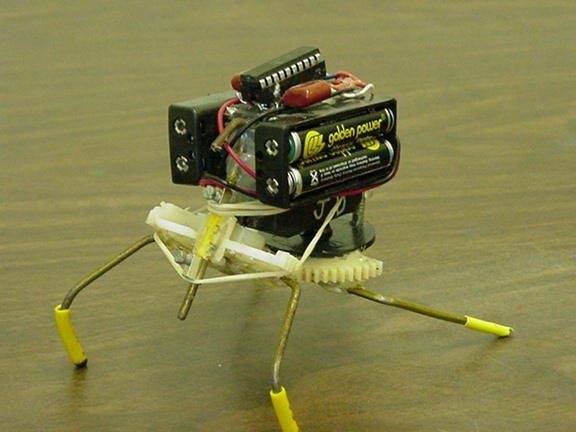
Nėra nieko įdomiau už vaikščiojantį robotą, nes toks robotas imituoja geriausias gyvas būtybes, kurios gyvena kartu su mumis mūsų planetoje. Pasigaminti tokį robotą nėra sunku, tačiau reikia turėti norą ir šiek tiek įgūdžių elektronikos srityje.
Medžiagos ir įrankiai:
- varinės vielos gabalas;
- du pirštų baterijų laikikliai;
- du monolitiniai keramikos kondensatoriai po 0,22 mF;
- vienas 3,3M rezistorius;
- 74NST240 aštuonių kanalų (vieno) kanalų keitiklis;
- 20 kontaktų DIP 74XX240 arba 74XX245 (vienas);
- servovariklis (vienas);
- jungiklis;
- viena plastikinė pavara;
- laido jungtis.
Gamybos procesas:
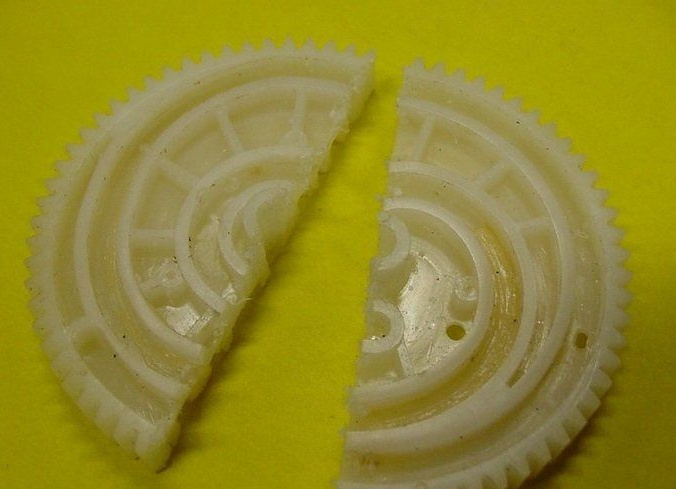
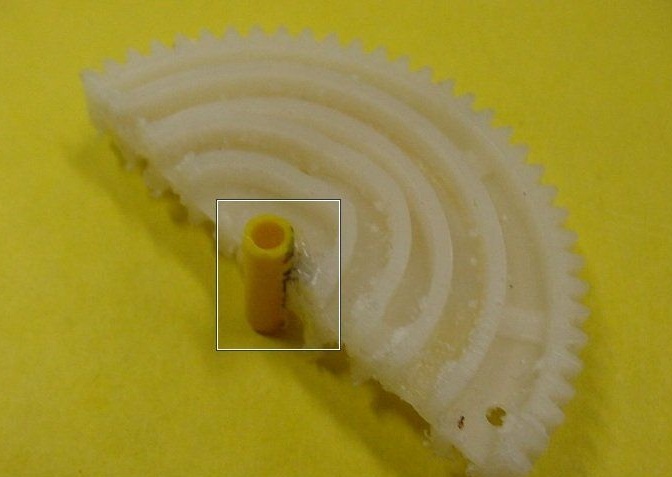
Pirmasis žingsnis. Pavarų paruošimas
Turite paimti plastikinę pavarą ir supjaustyti ją į dvi identiškas dalis. Tada jums reikia pašalinti ragą ir naudoti klijus, kad pritvirtintumėte jį prie vieno puslankiu.

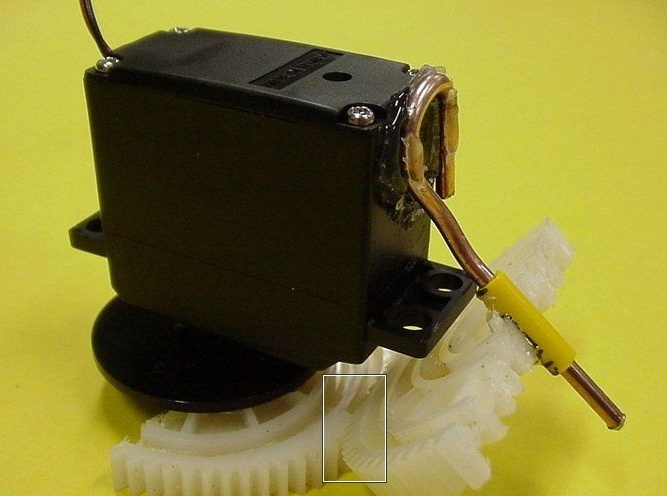
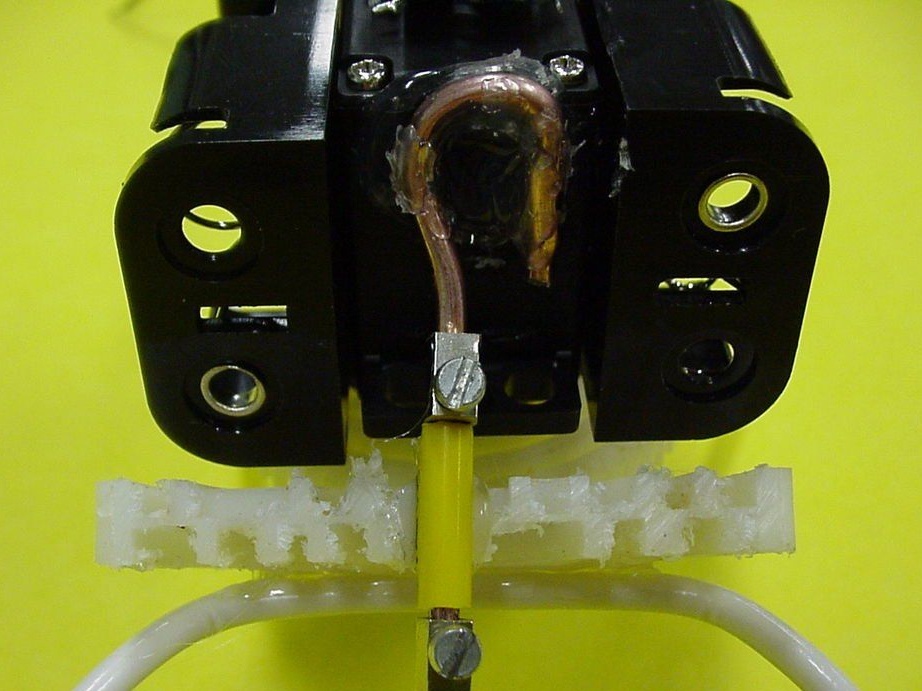
Antras žingsnis Variklio keitimas
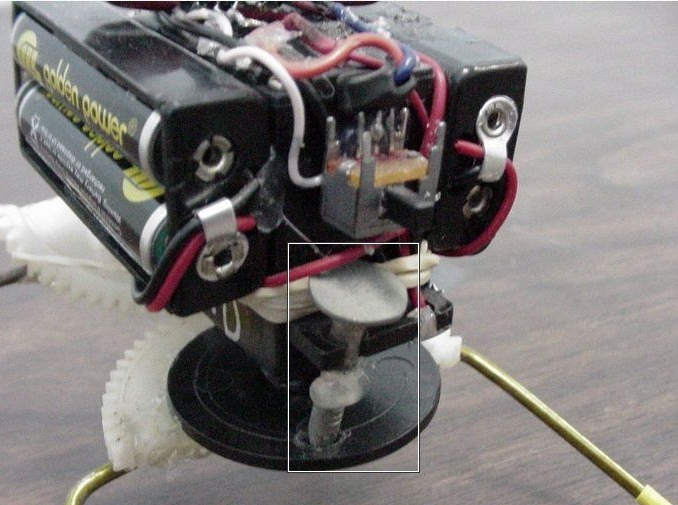
Servovariklis turi būti perdarytas, kad jis veiktų tik sukdamasis. Tada jums reikia klijuoti varinę laidą prie jo, kaip parodyta paveikslėlyje.
Taip pat šiame etape jums reikės tinkamo skersmens plastikinio vamzdžio, jis turi būti priklijuotas prie puslankiu. Vėliau variklio garsinis signalas dedamas į pradinę vietą. Tada uždėkite plastikinį vamzdį ant varinės vielos. Šiame etape darbas gali būti laikomas baigtu.
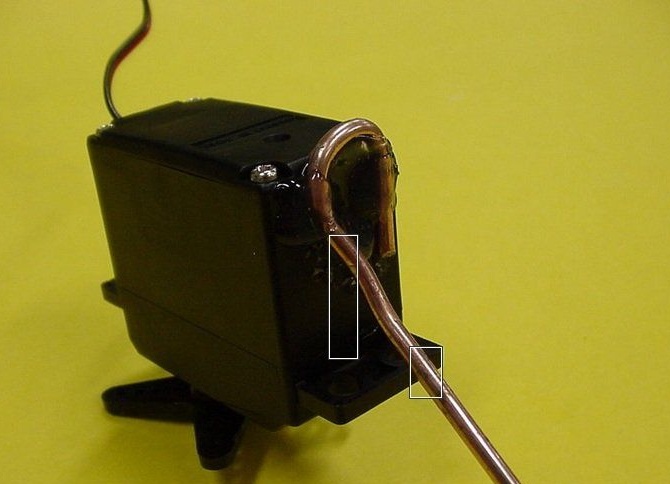

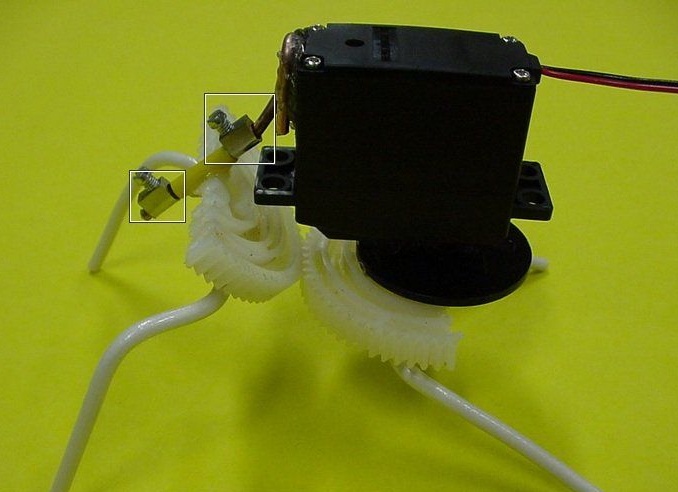
Trečias žingsnis Robotų letenų kūrimas ir montavimas
Varinė viela naudojama kaip kojos, ji turi būti sulenkta, kaip parodyta paveikslėlyje. Tada autorius priklijuoja letenėles prie puslankiu. Dabar prie servovariklio taip pat galite pritvirtinti akumuliatoriaus laikiklius.


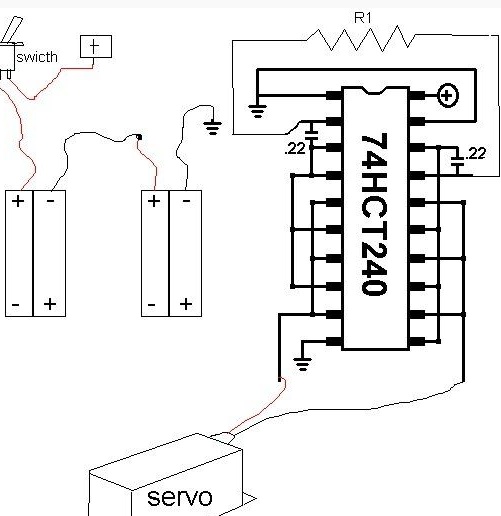
Ketvirtas žingsnis Darbas su elektronika
Turbūt tai yra pats sunkiausias ir lemtingiausias momentas. Visa sistema turi būti aiškiai sujungta, kaip parodyta diagramoje. Iškart po prijungimo robotas bus paruoštas ir jį bus galima išbandyti.

Keisdami kojų kampą, iš roboto galite pasiekti įvairias savybes. Tai galite padaryti greičiau arba lėčiau. Taip pat galite aprūpinti robotą papildomais valdikliais, pavyzdžiui, ūsais, kuriais jis nustatys kliūtį. Taip pat galite aprūpinti robotą akimis šviesos diodų pavidalu, tai sukurs dar didesnį tikrovės panašumą į gyvą būtybę.
Tokį robotą reikia paleisti ant lygaus paviršiaus. Kad kojos neslystų, „Cambrices“ gali būti nešiojamos jų galuose.