
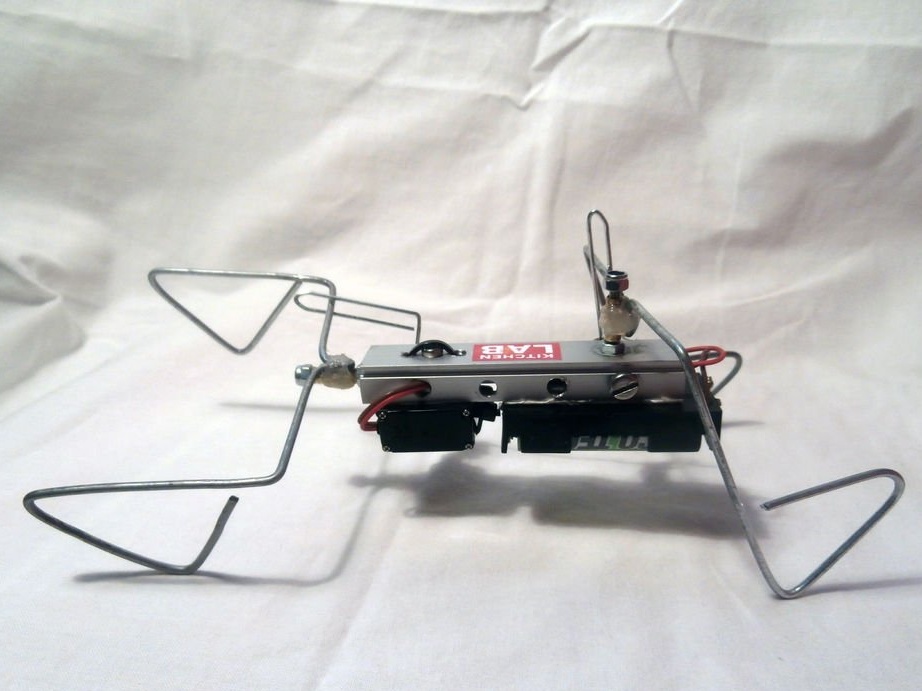
Sveiki visi! Aš buvau įkvėptas kurti savo „BEAM“ robotą, pamačiusi pakankamai daug šių robotikos stebuklų su vienu varikliu ir dviem varikliais. Idėja buvo sukurti vaikščiojantį robotą, vaikščiojantį panašiai kaip 1 ar 2 variklių BEAM vaikštynes. Po kelių nesėkmingų eksperimentų padariau tai, ko norėjau!
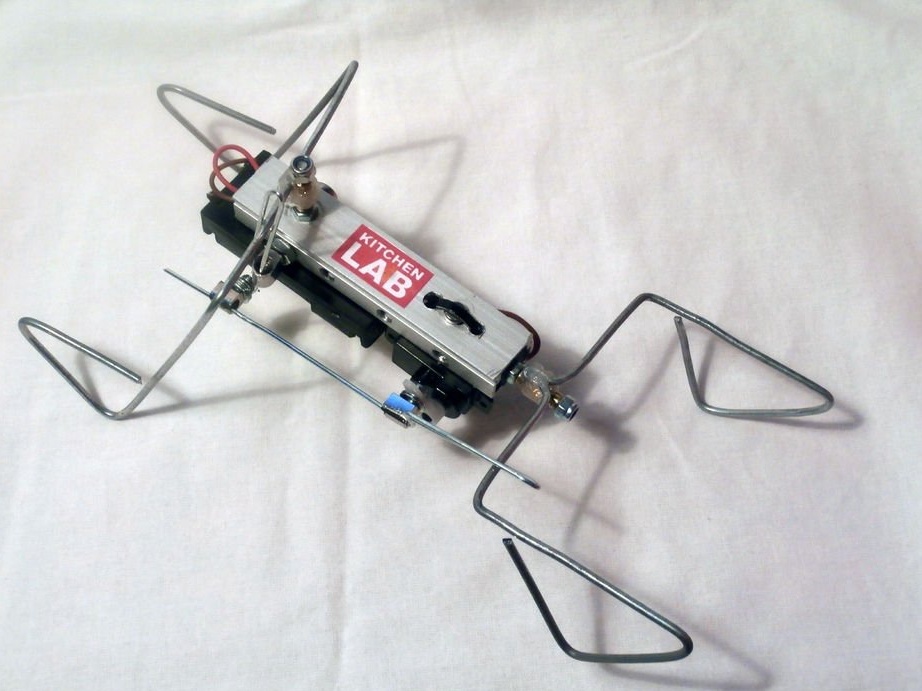
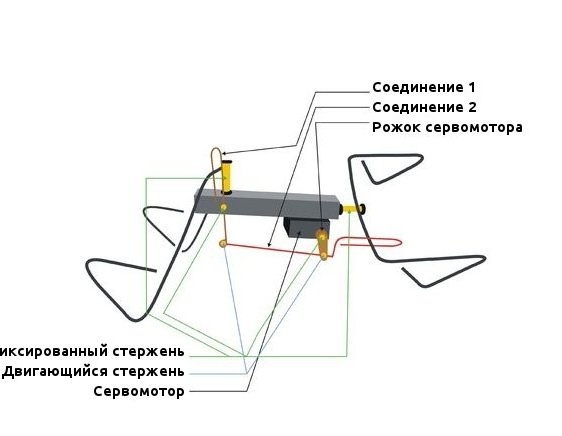
1 žingsnis: mechanizmas
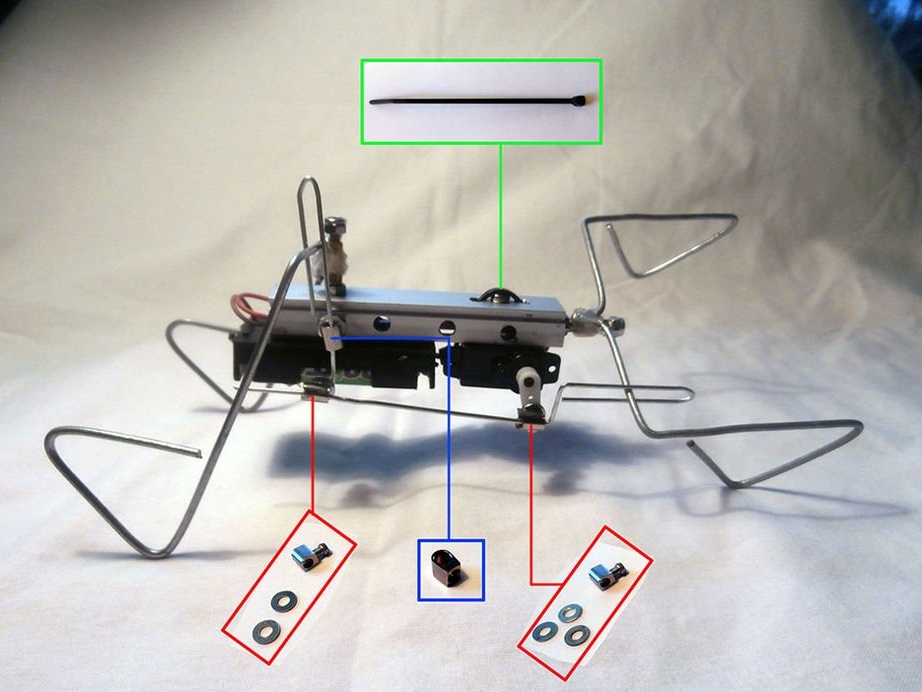
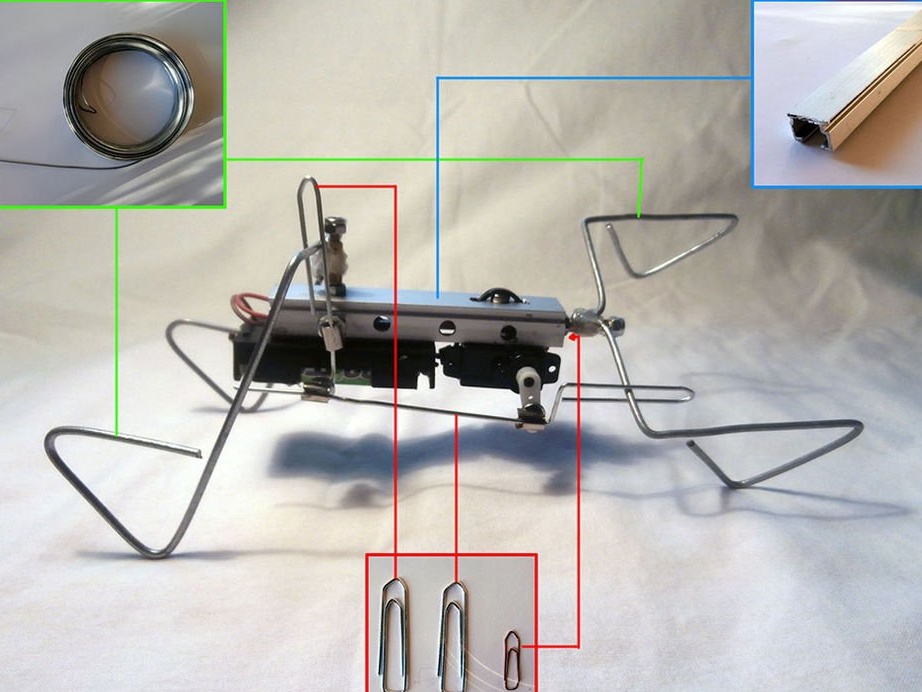
2 žingsnis: Būtinos dalys

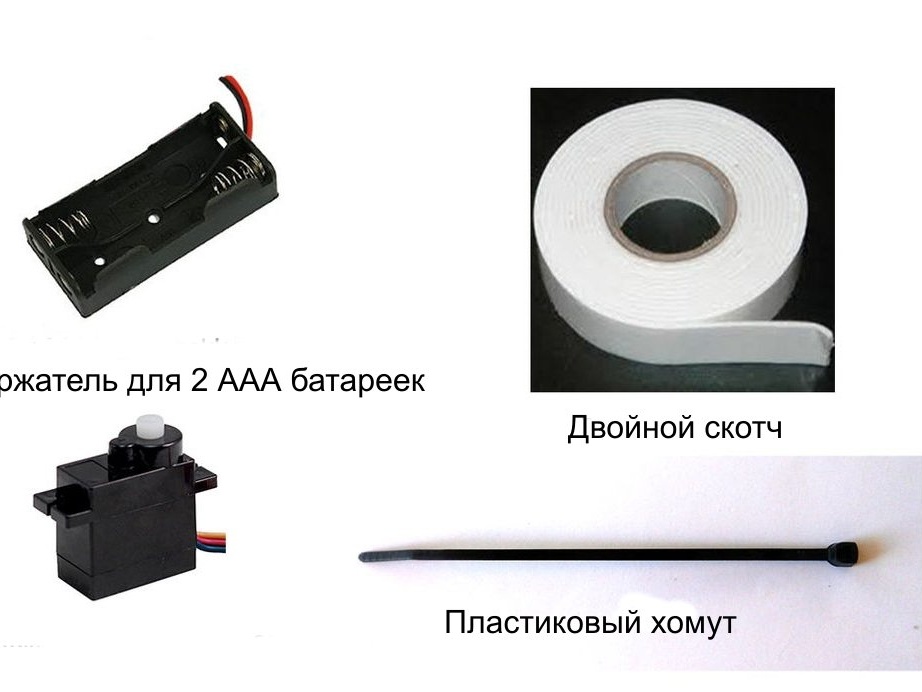



(1x) nepertraukiamo sukimosi servo
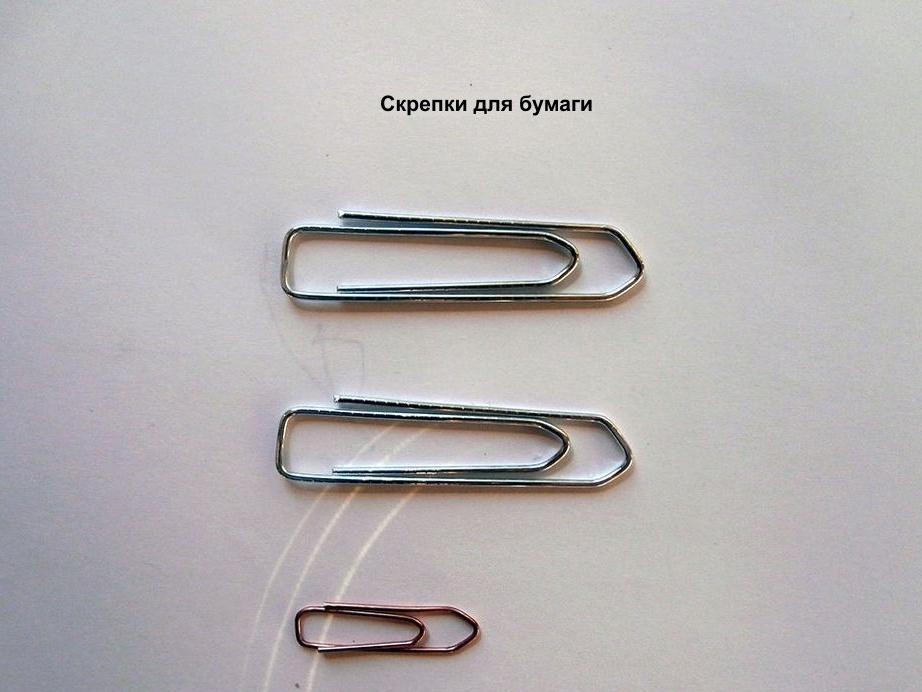
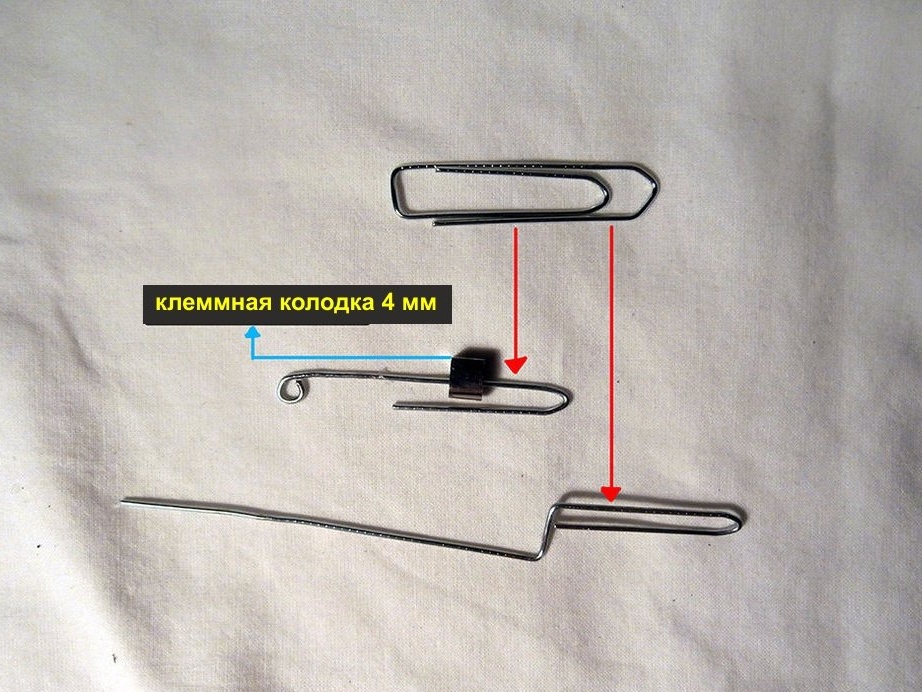
(2x) dideli sąvaržėlės
(1x) mažas sąvaržėlė
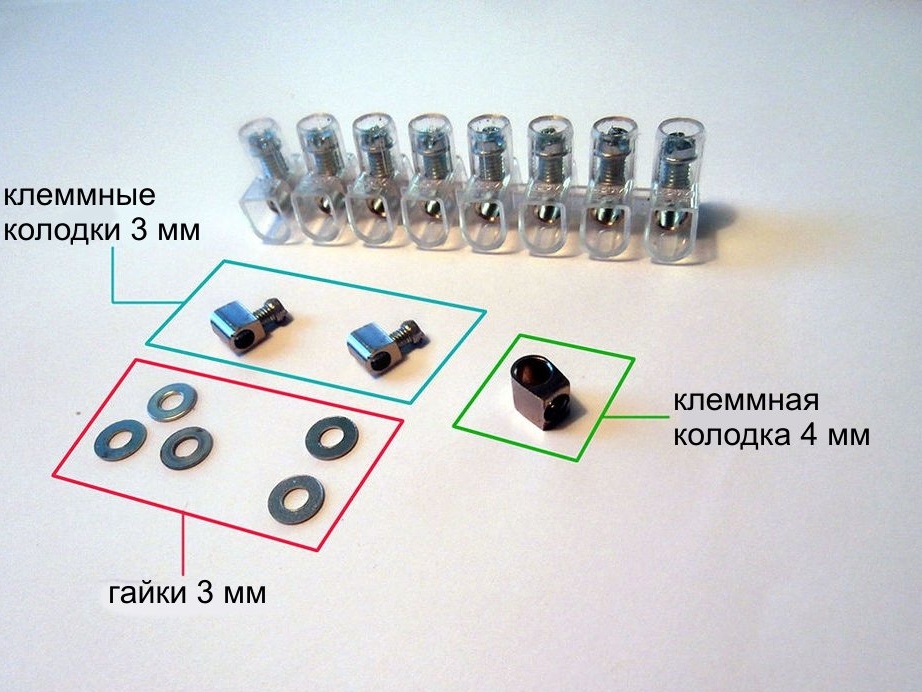
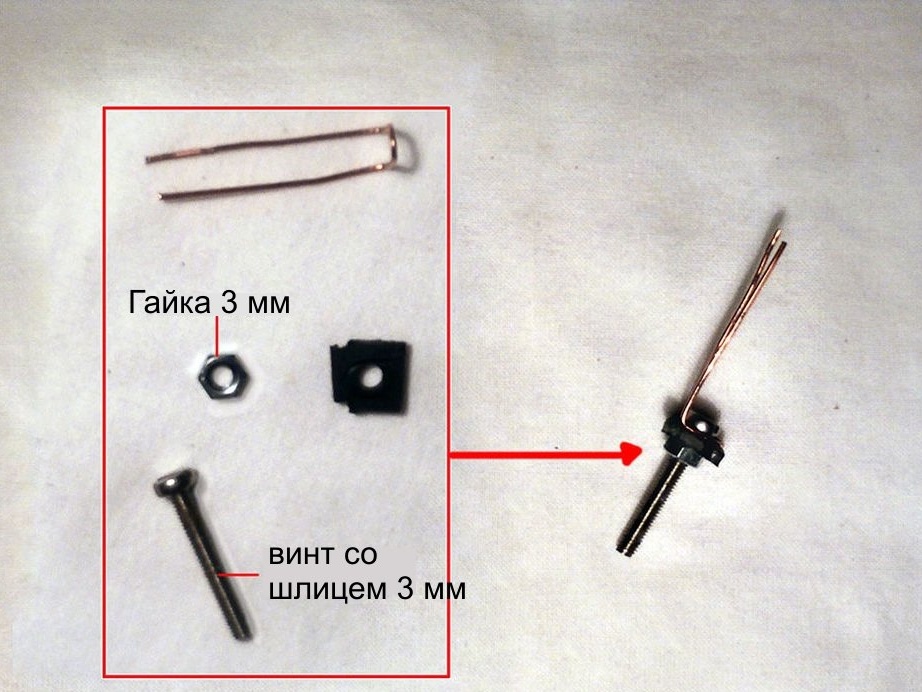
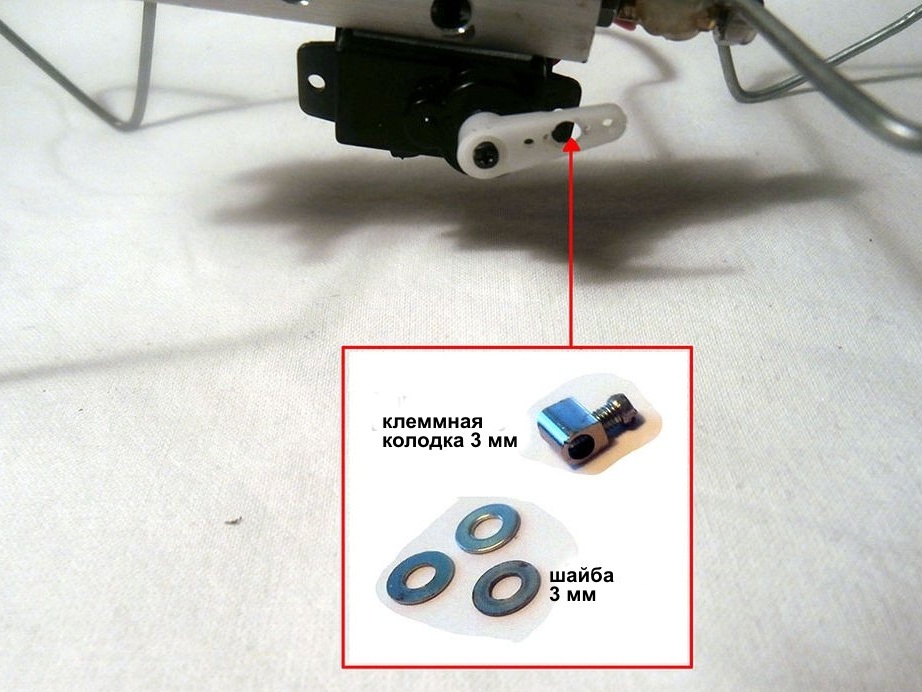
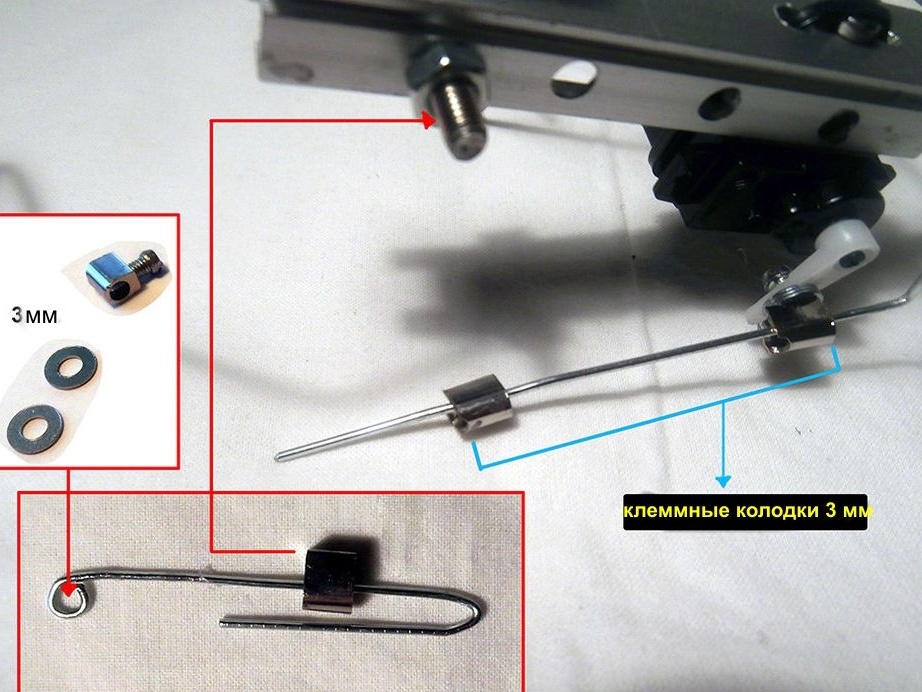
(2x) gnybtų blokai (3mm)
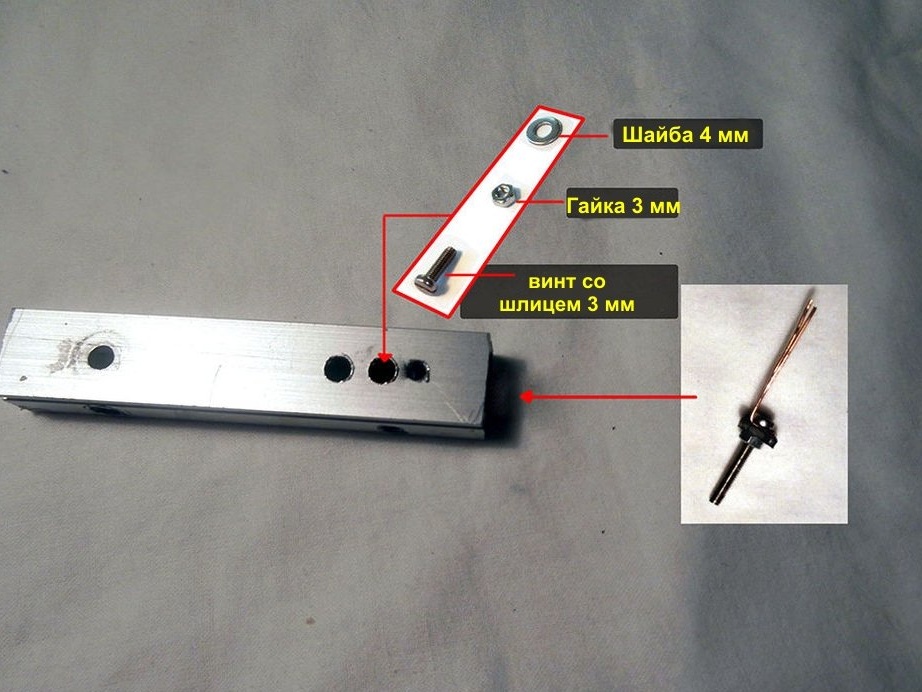
(1x) gnybtų blokai (4mm)
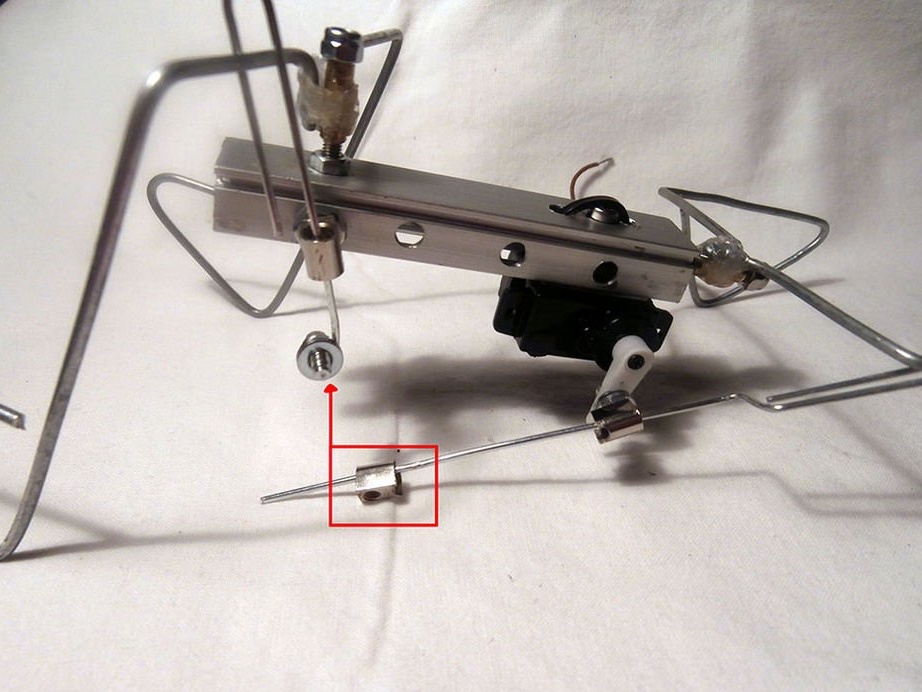
(1X) Naudotas aliuminio profilio blokas
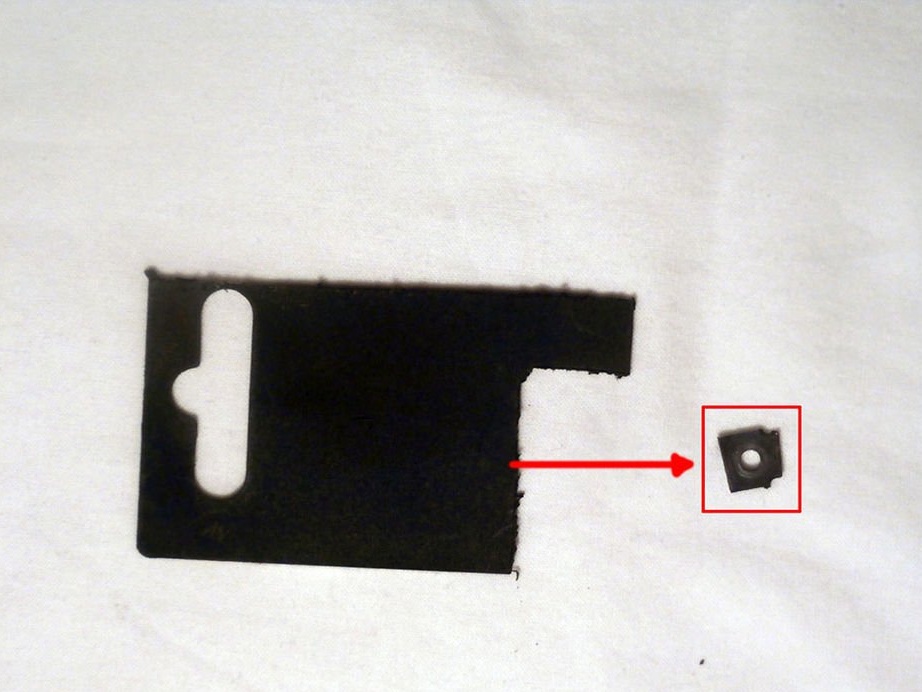
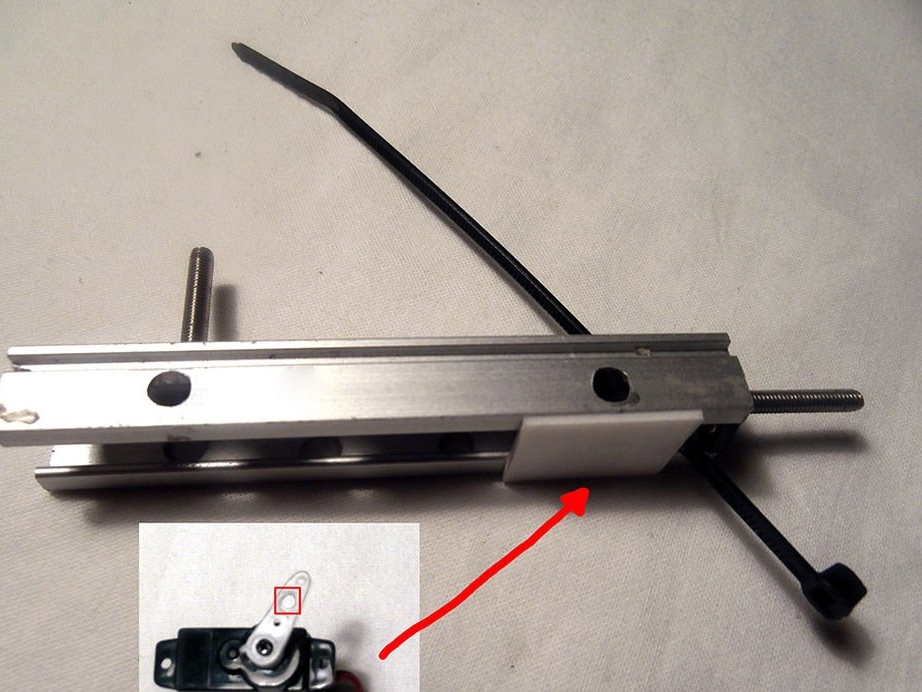
(1X) plastiko gabalas
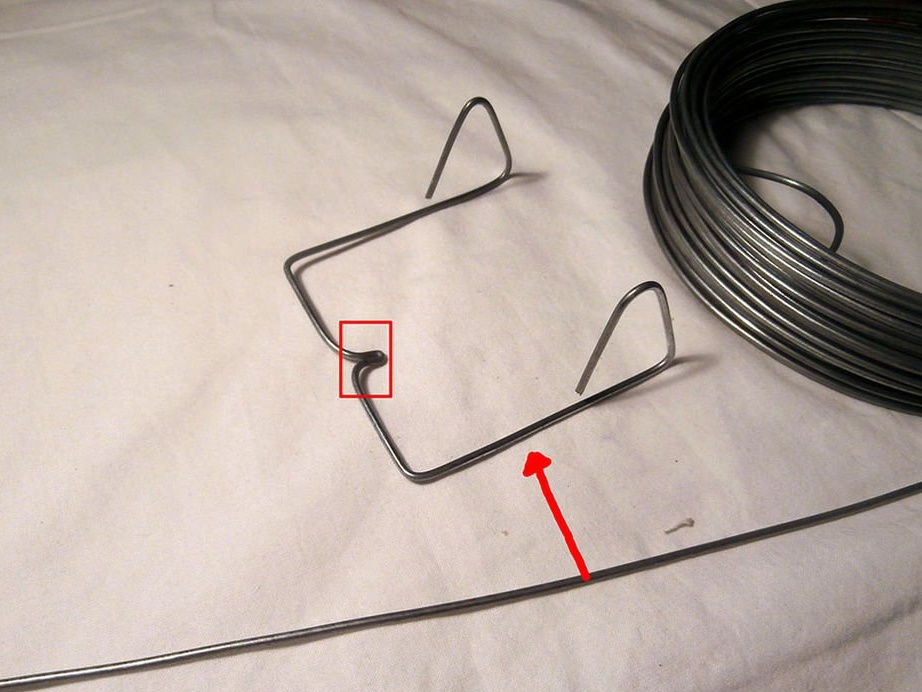
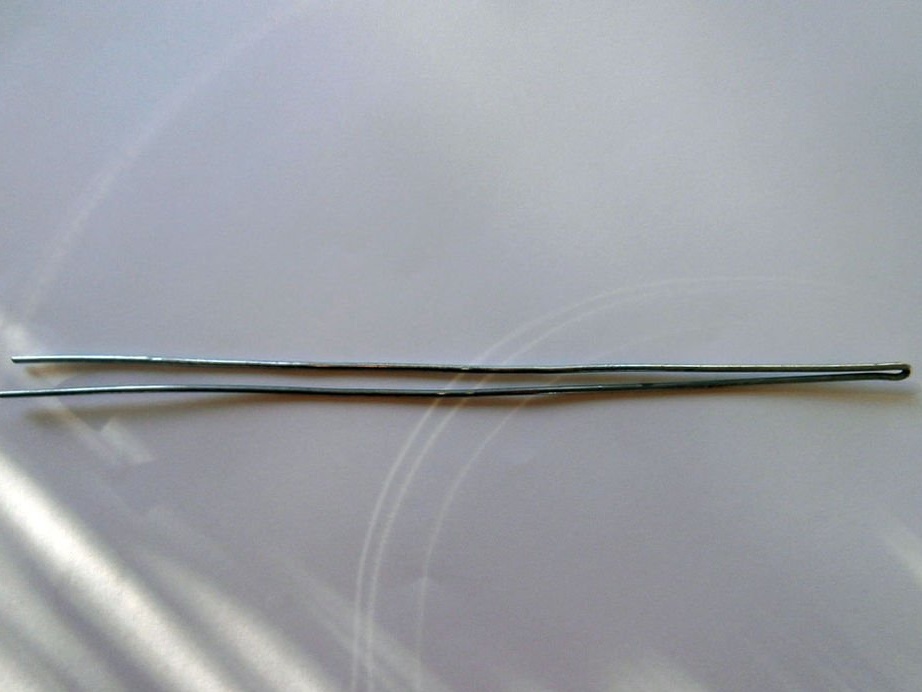
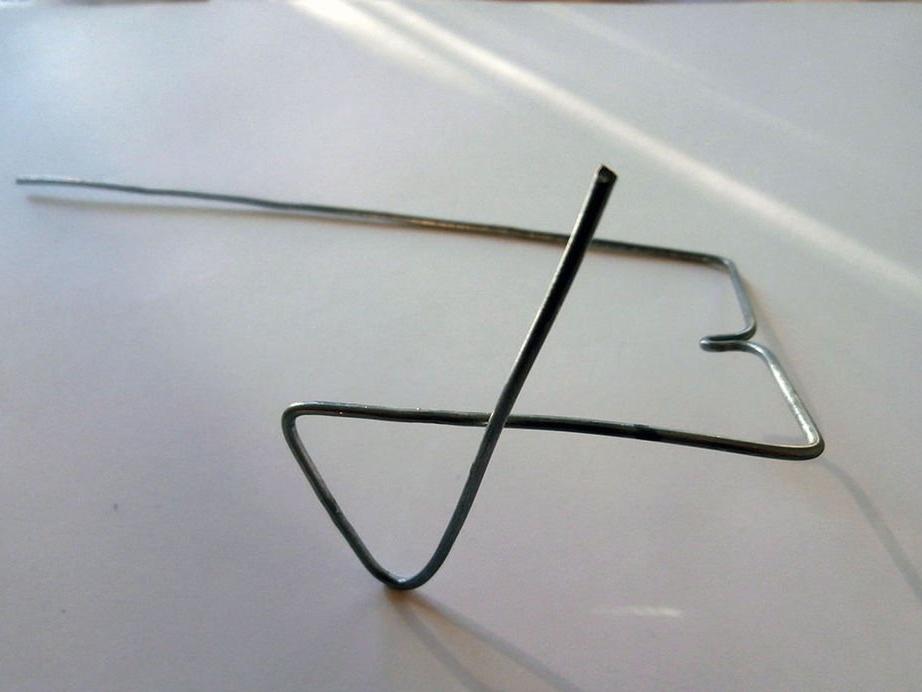
Plieninė viela (2 mm)
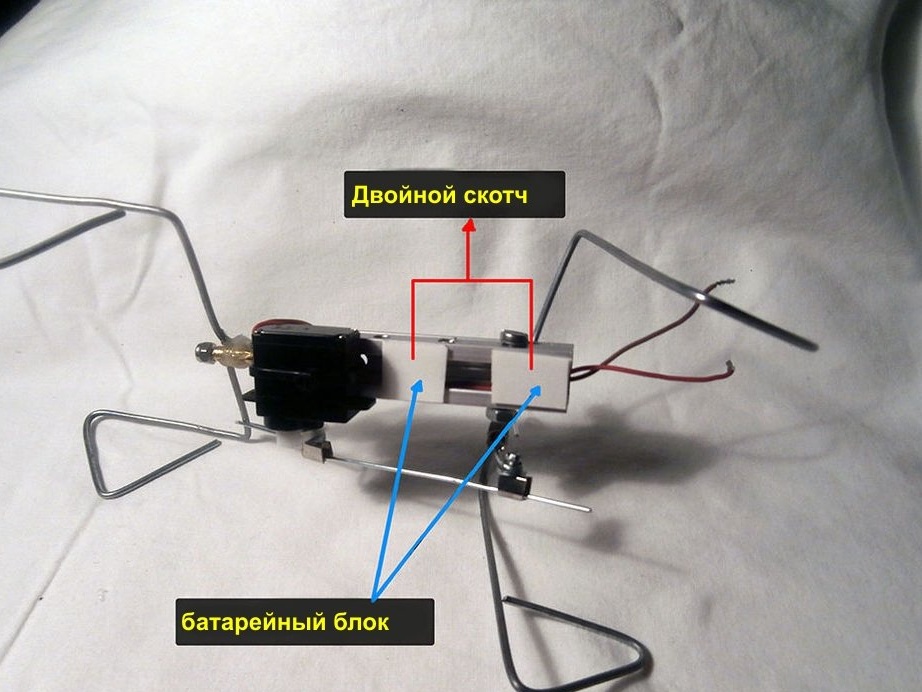
Dviguba lipni juosta
Žalvario vamzdis
(1X) mažas spaustukas
(1X) akumuliatoriaus paketas (2 x AAA)
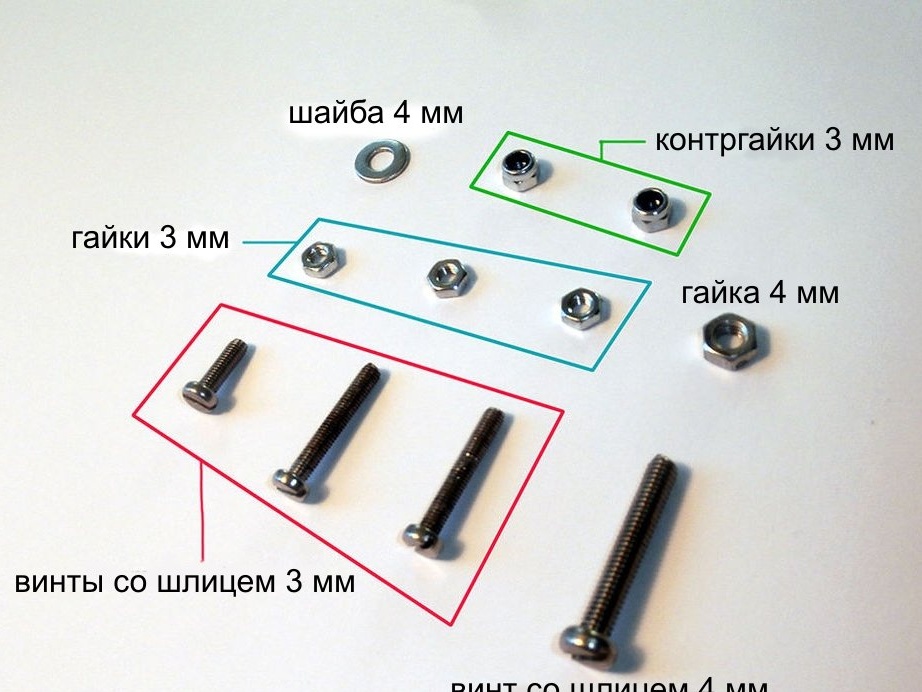
(2X) užraktai (3 mm)
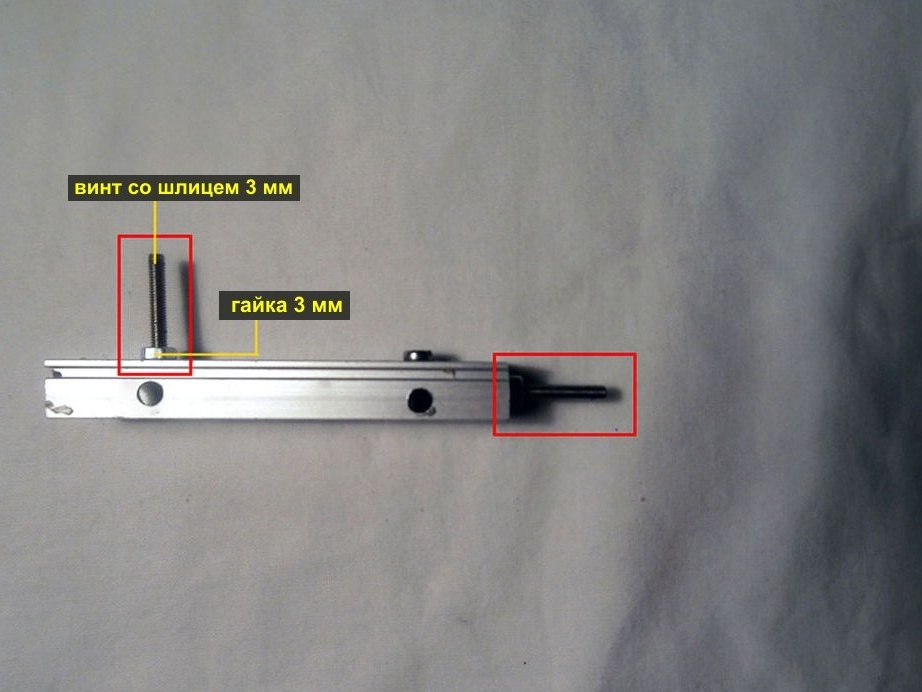
(3X) veržlės ir varžtai (3 mm)
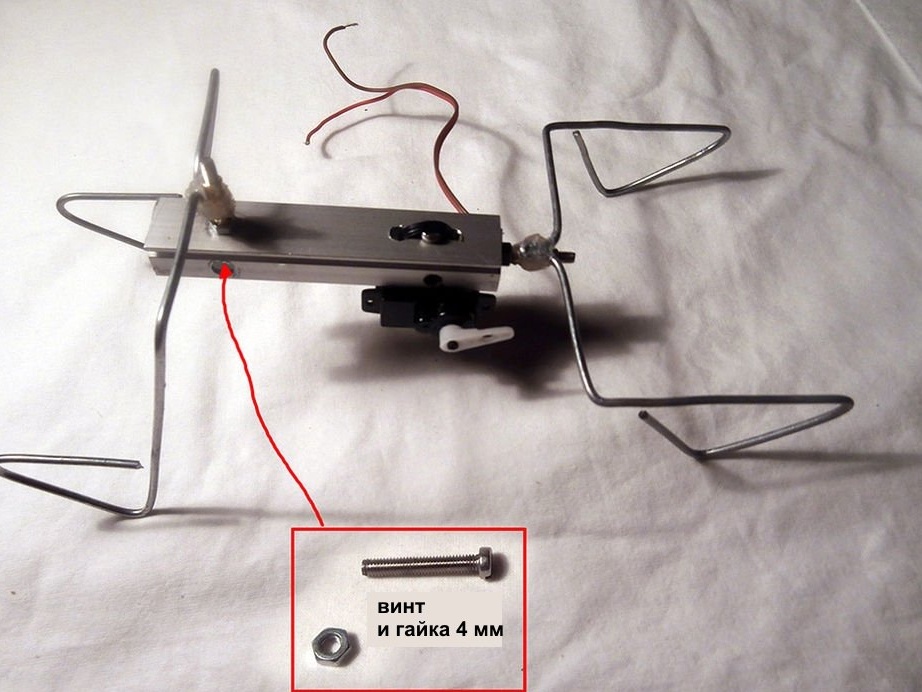
(1x) veržlės ir varžtai (4 mm)
(5x) poveržlė (3mm)
(1X) poveržlė (4mm)
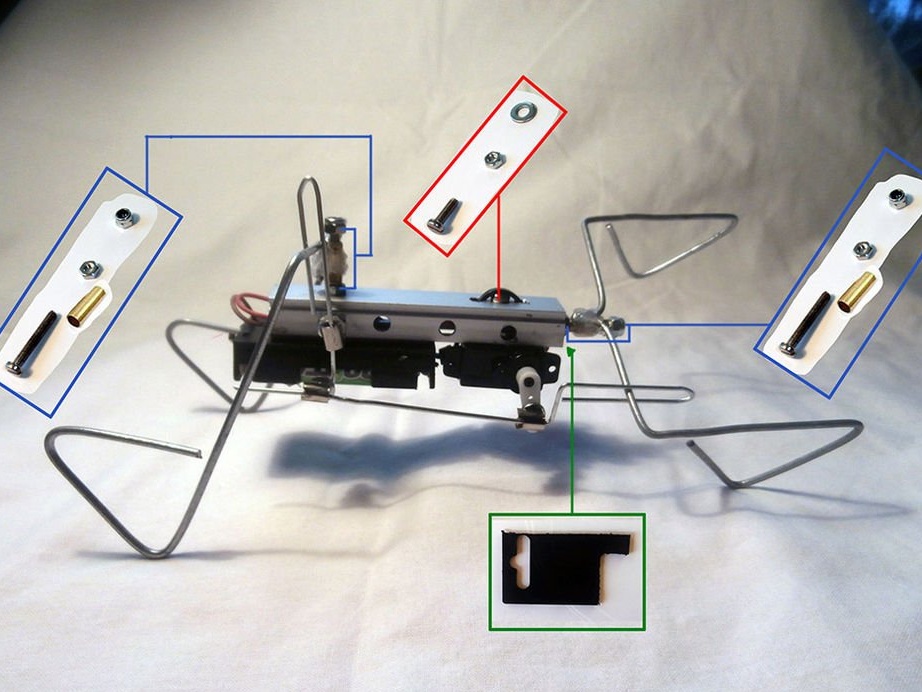
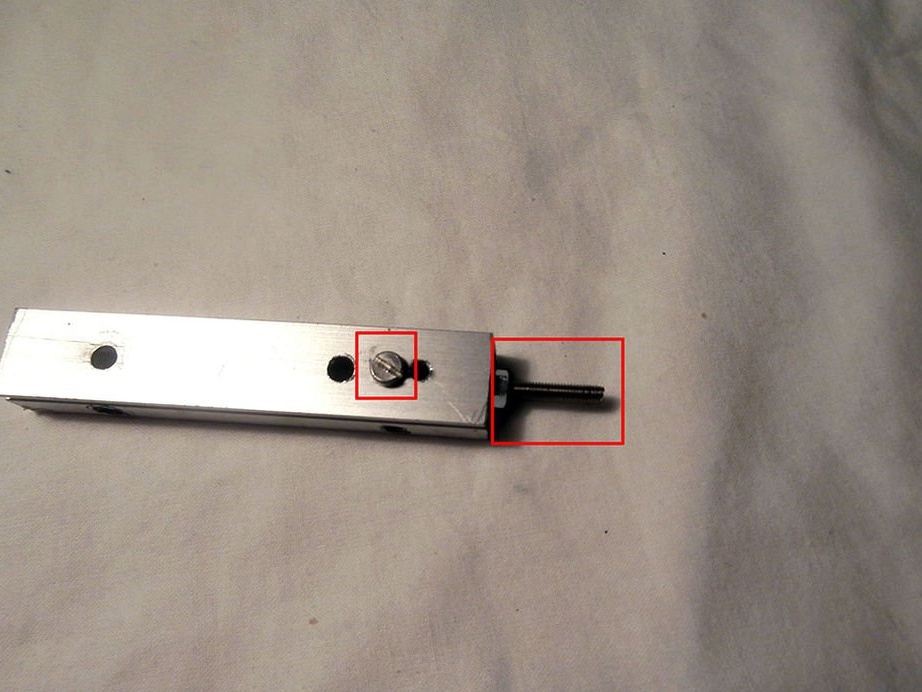
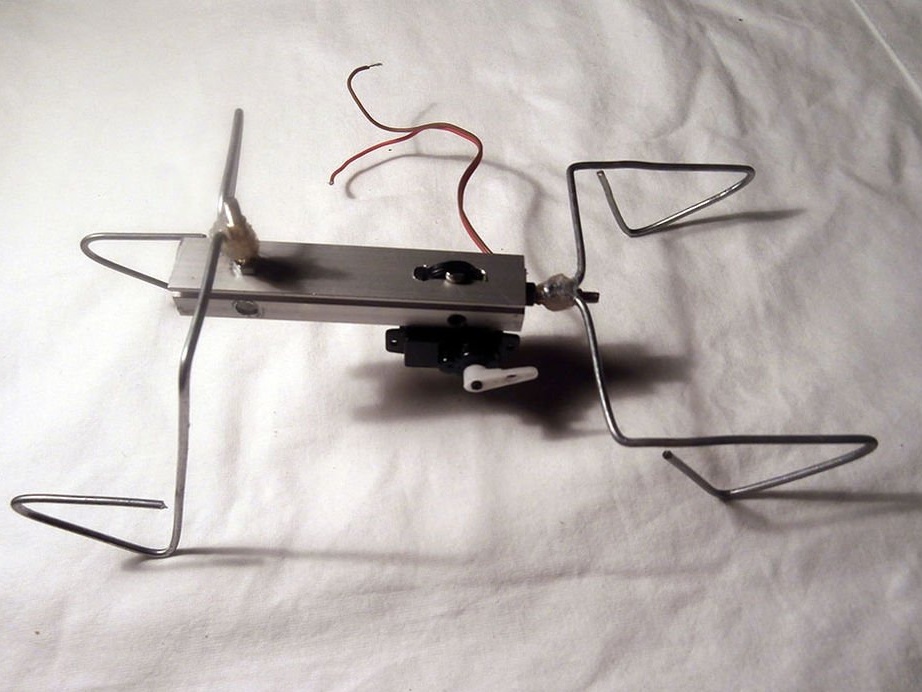
3 žingsnis: Dalių surinkimas
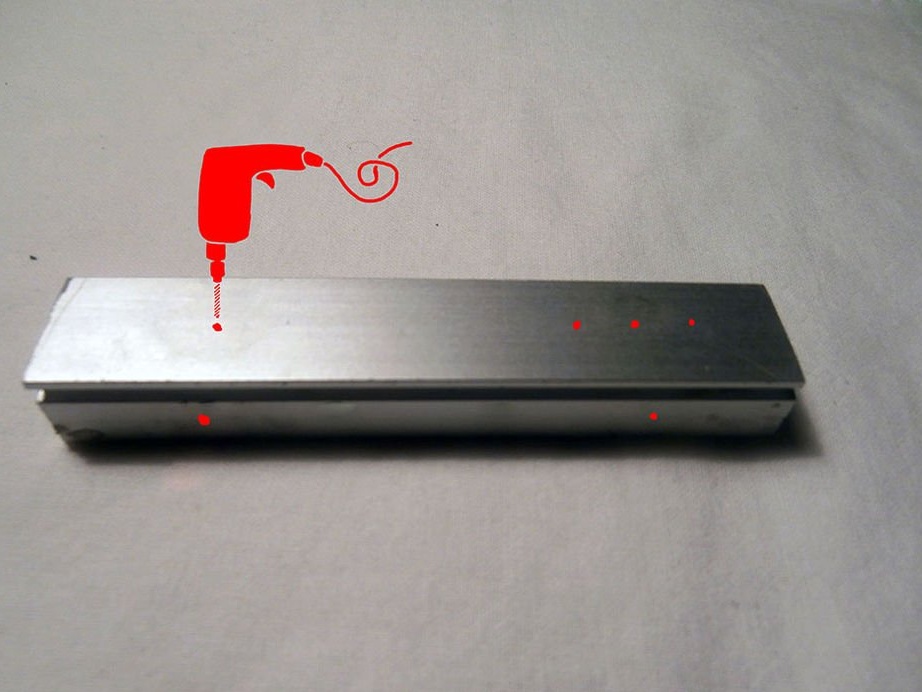
4 žingsnis: įrankiai
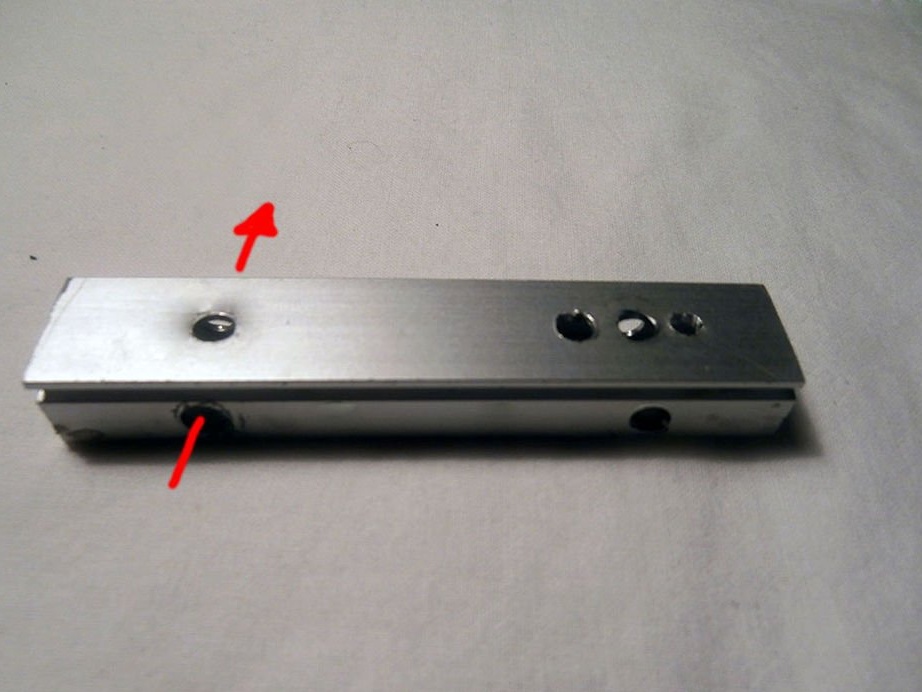
5 žingsnis: būstas

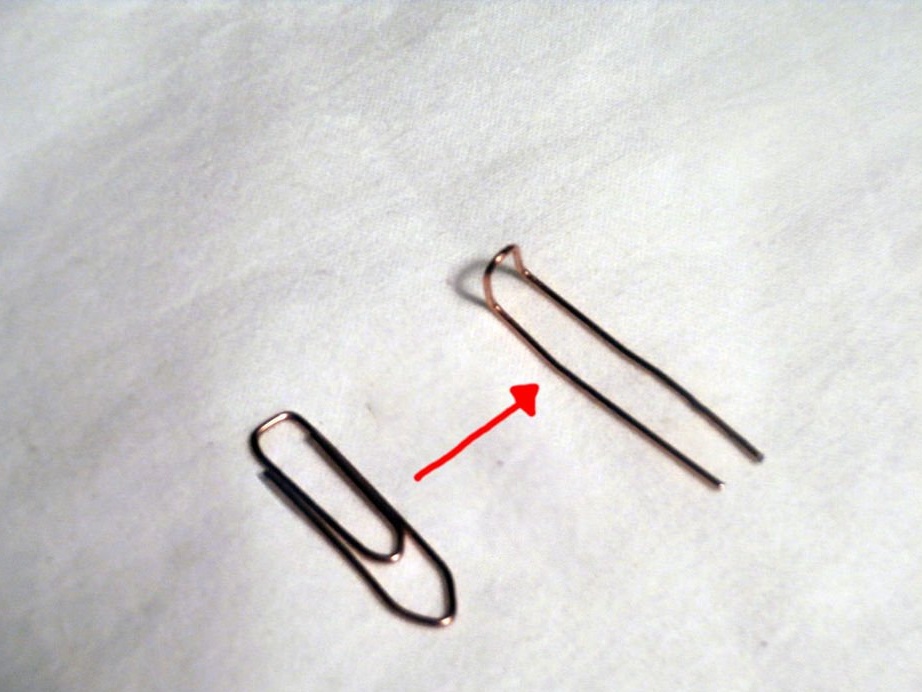

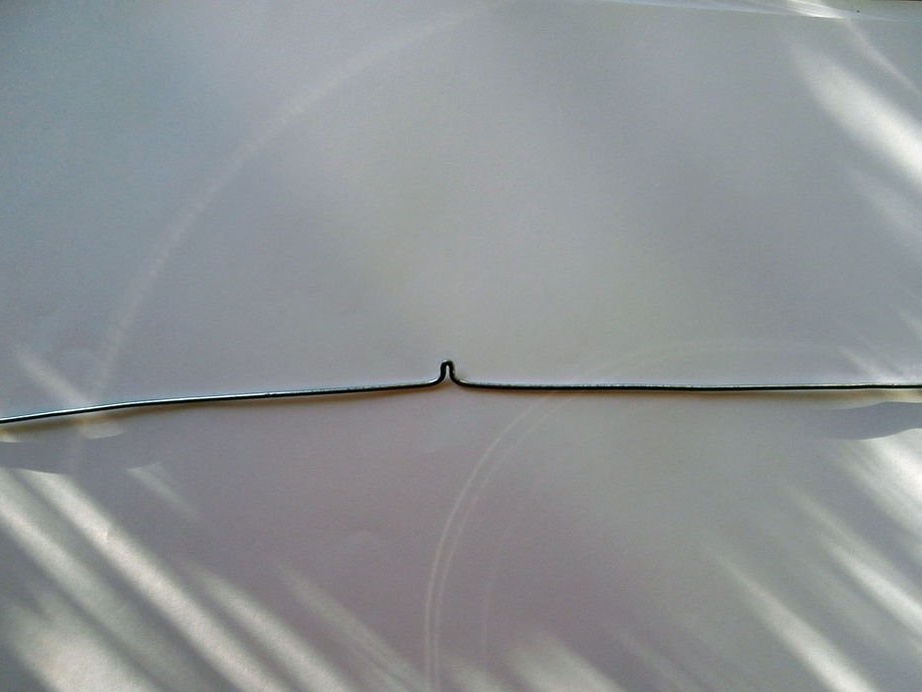
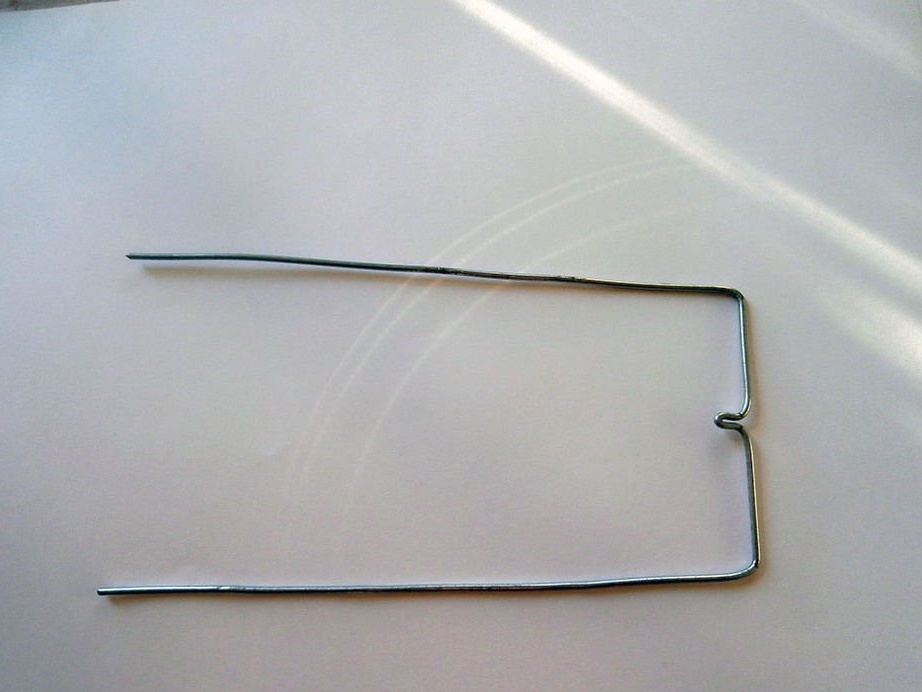
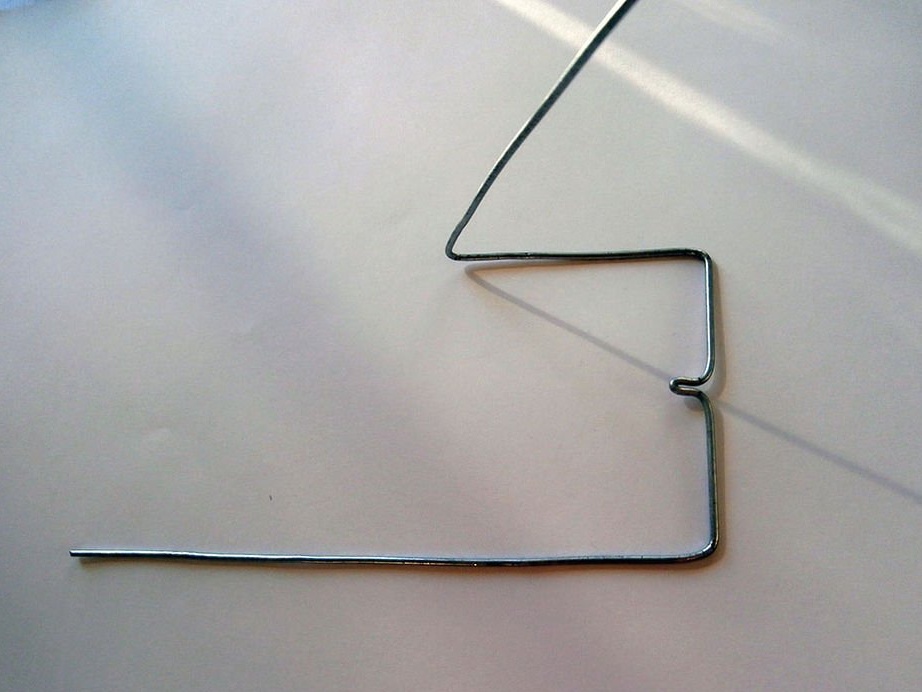
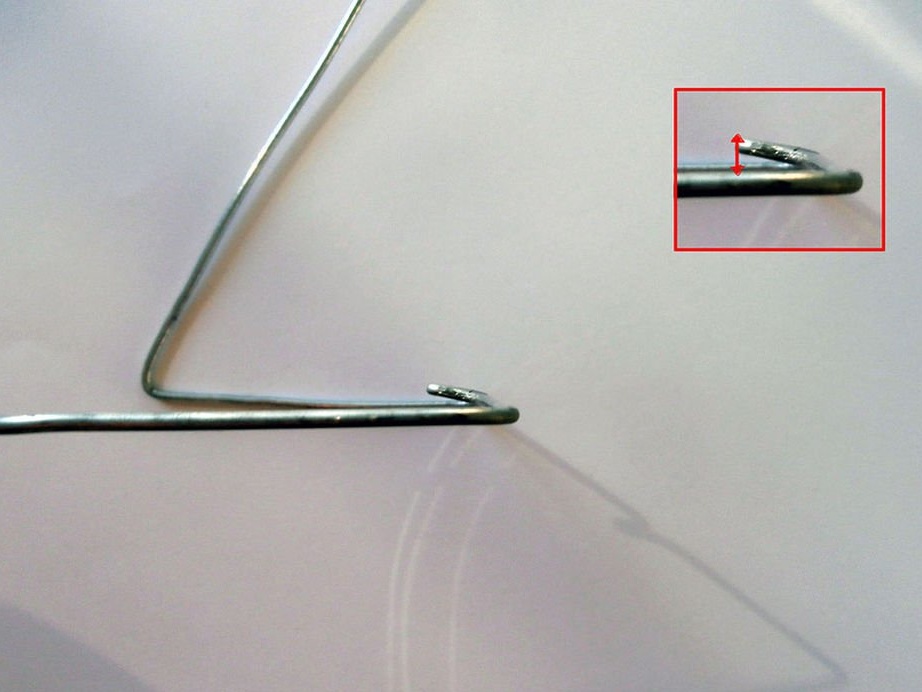
6 žingsnis: priekinės kojos
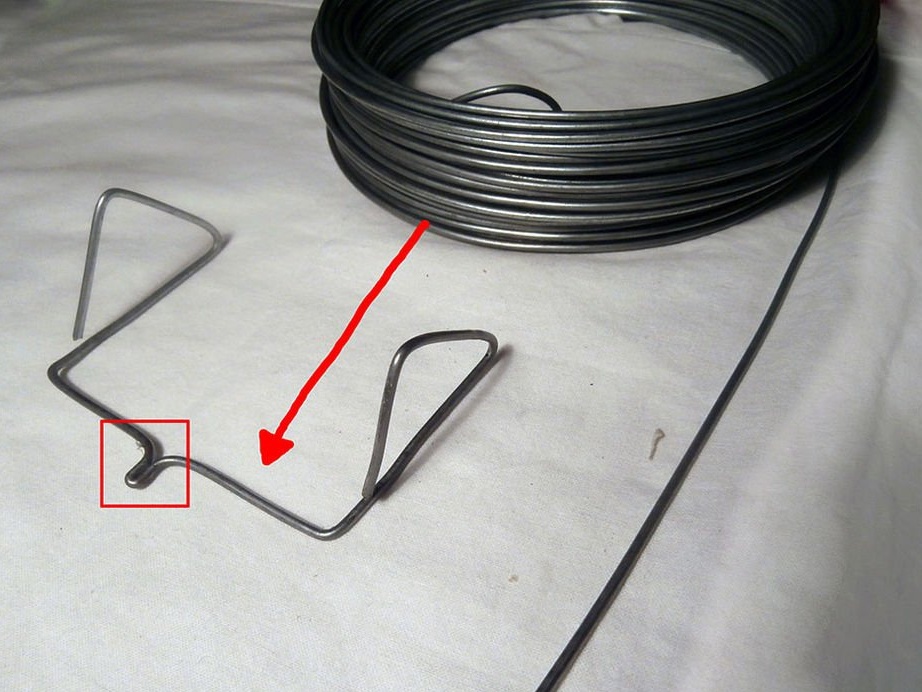
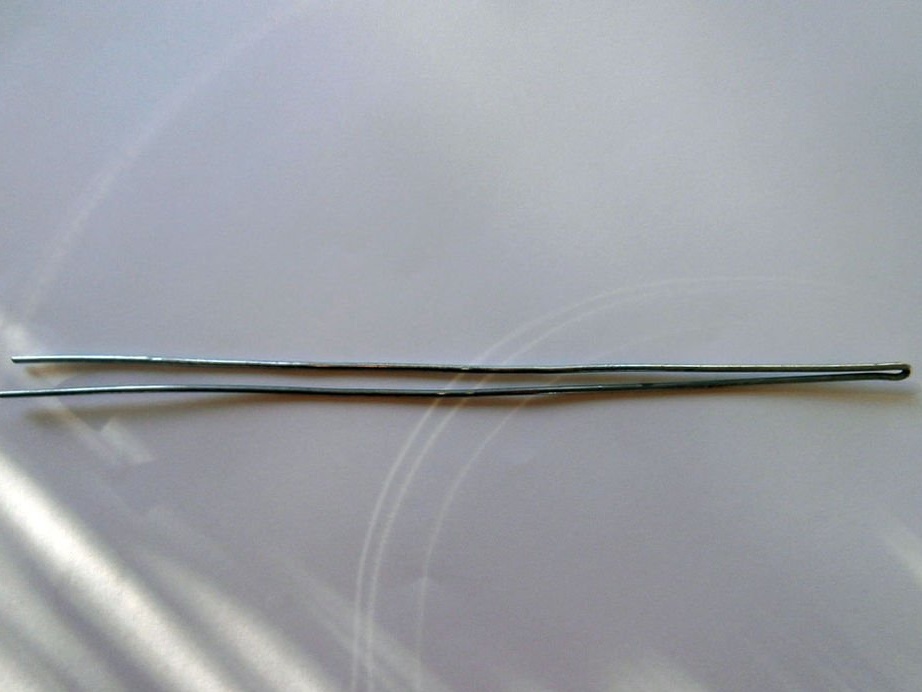
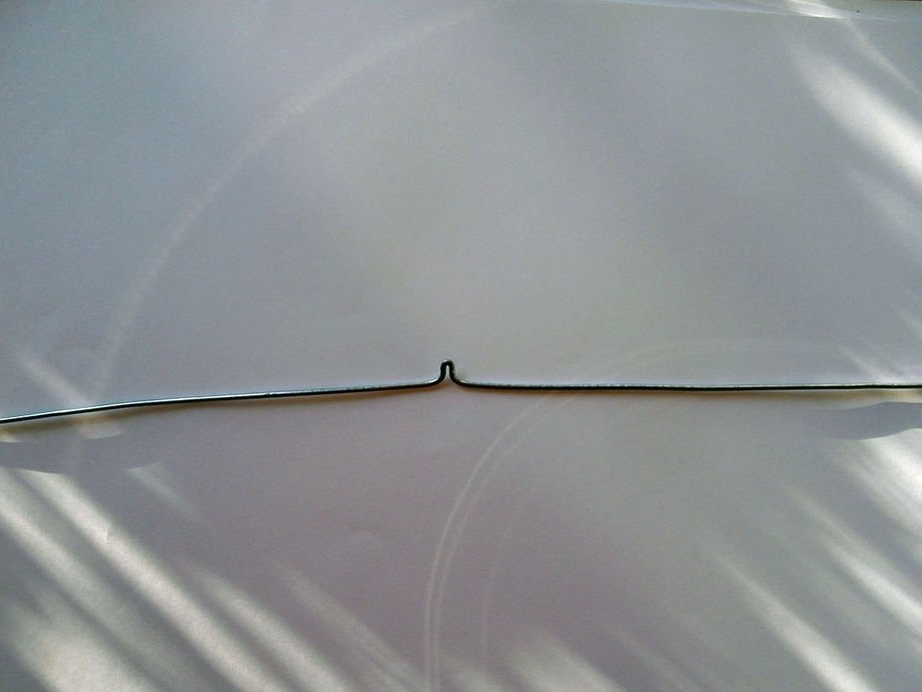
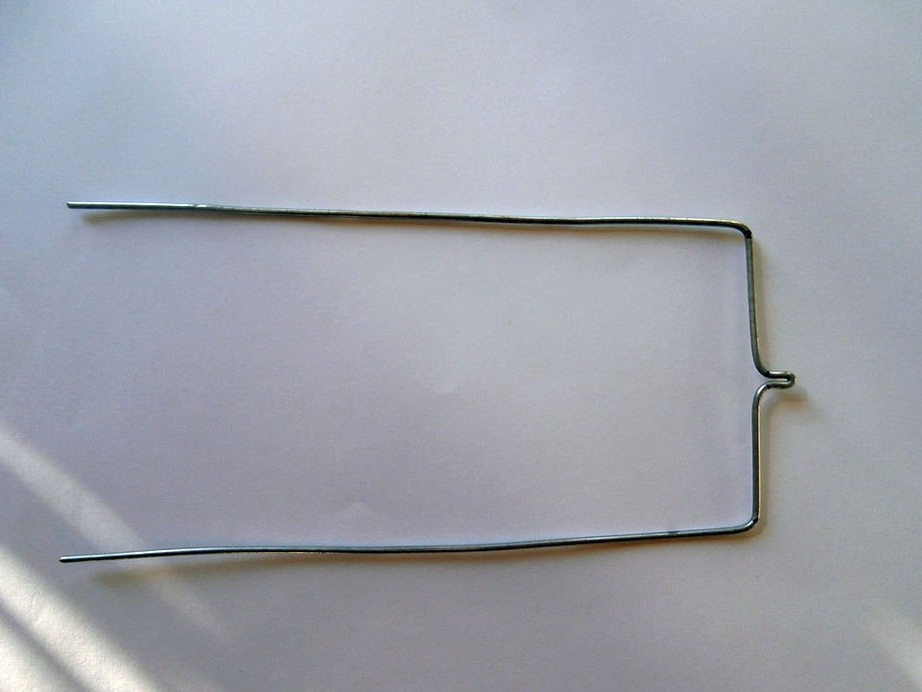
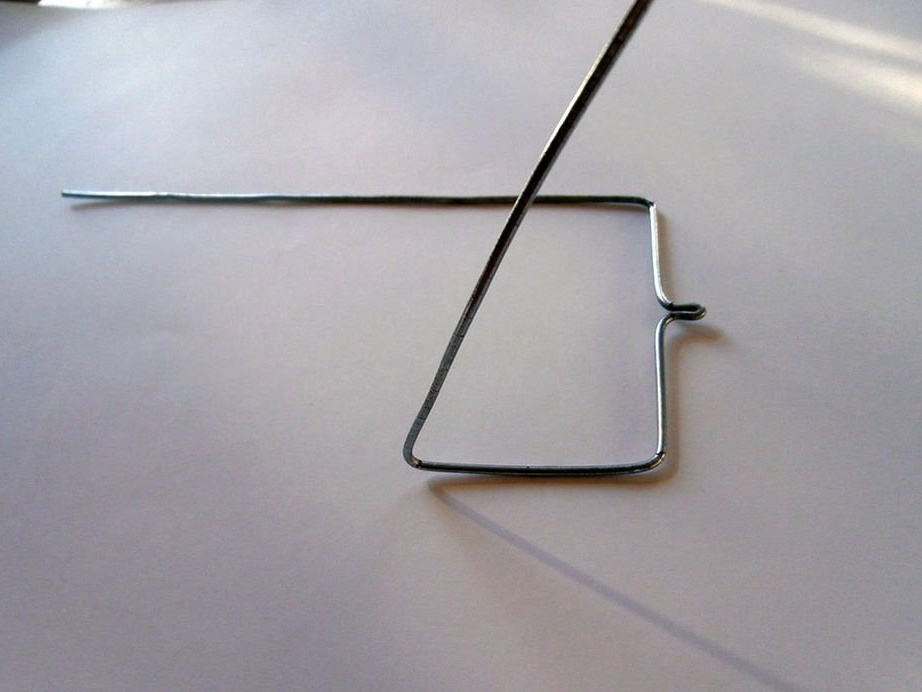
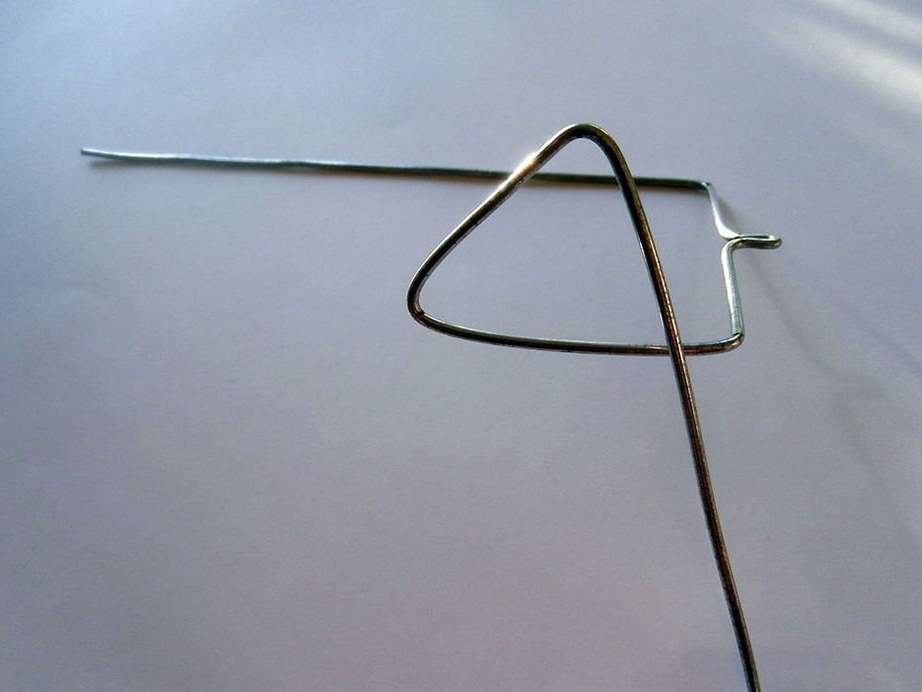
7 žingsnis: užpakalinės kojos
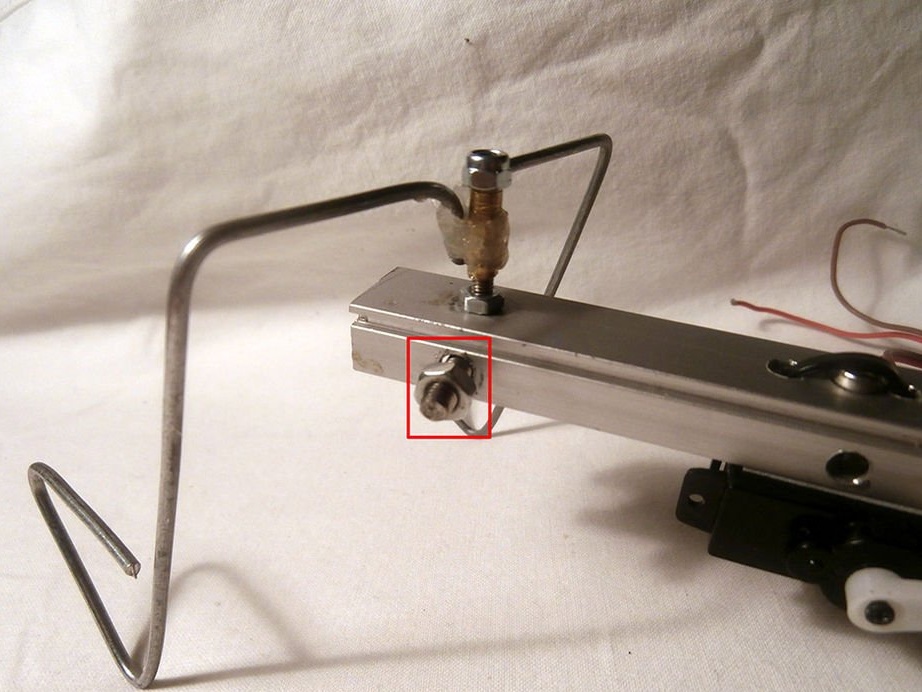
8 žingsnis: Pėdų pritvirtinimas
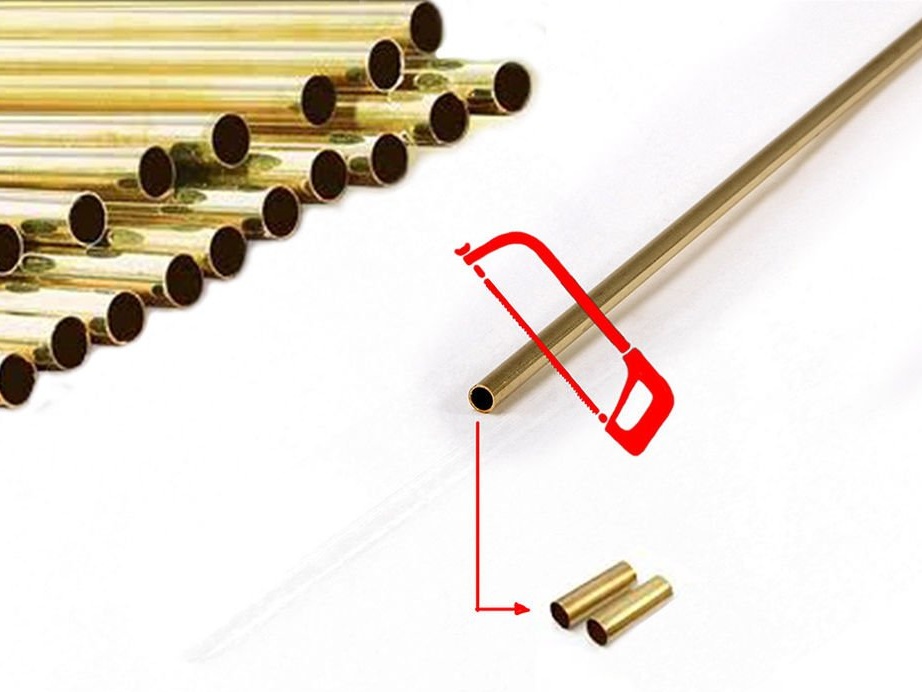
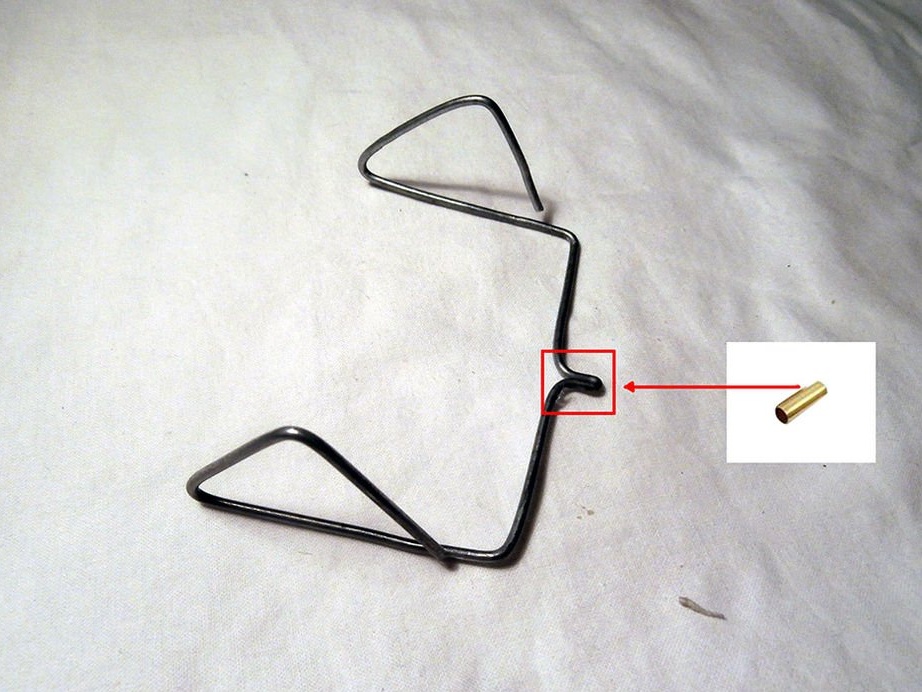
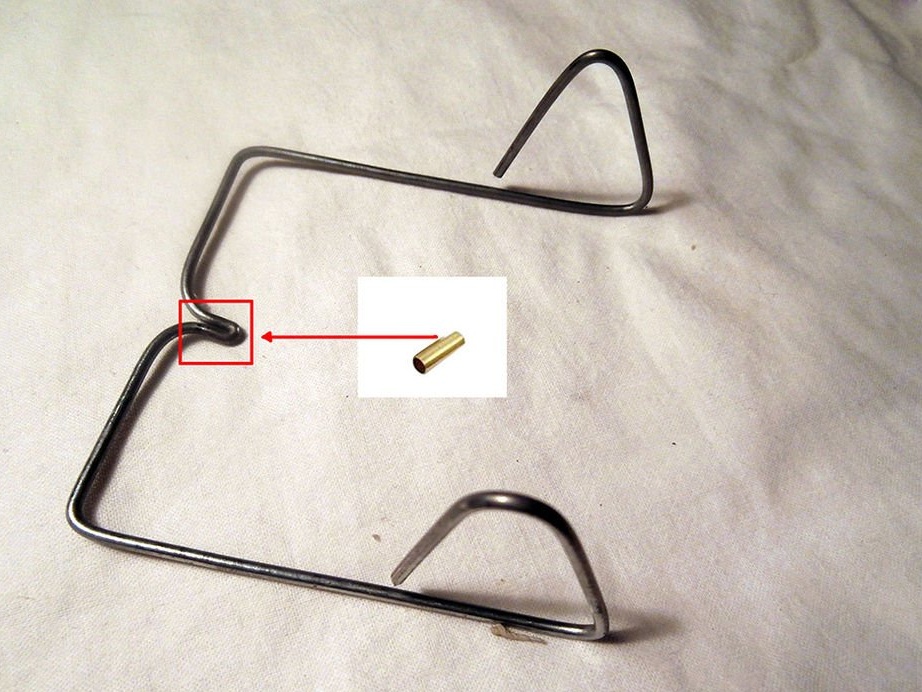
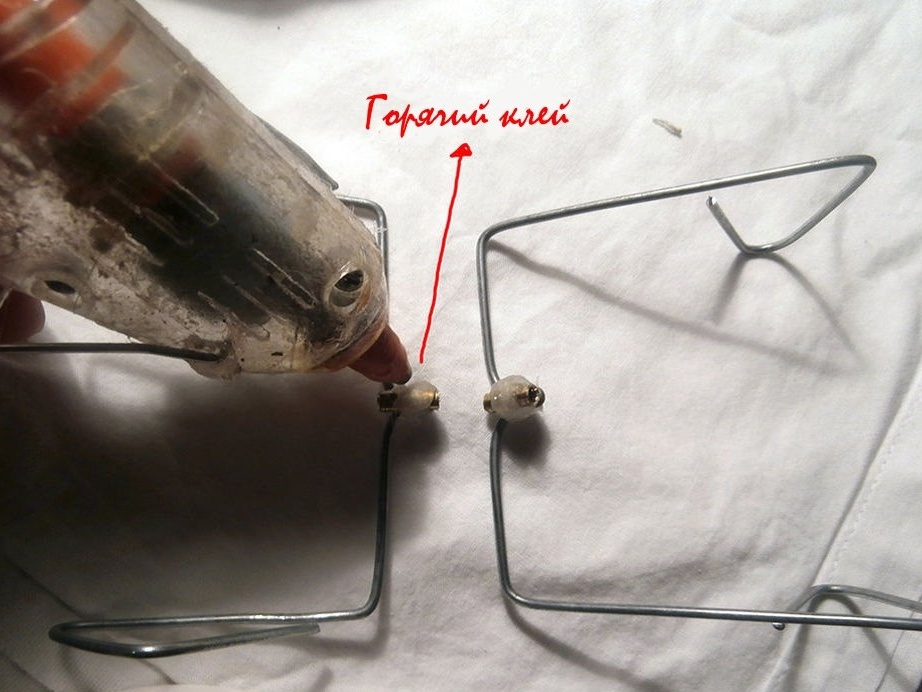
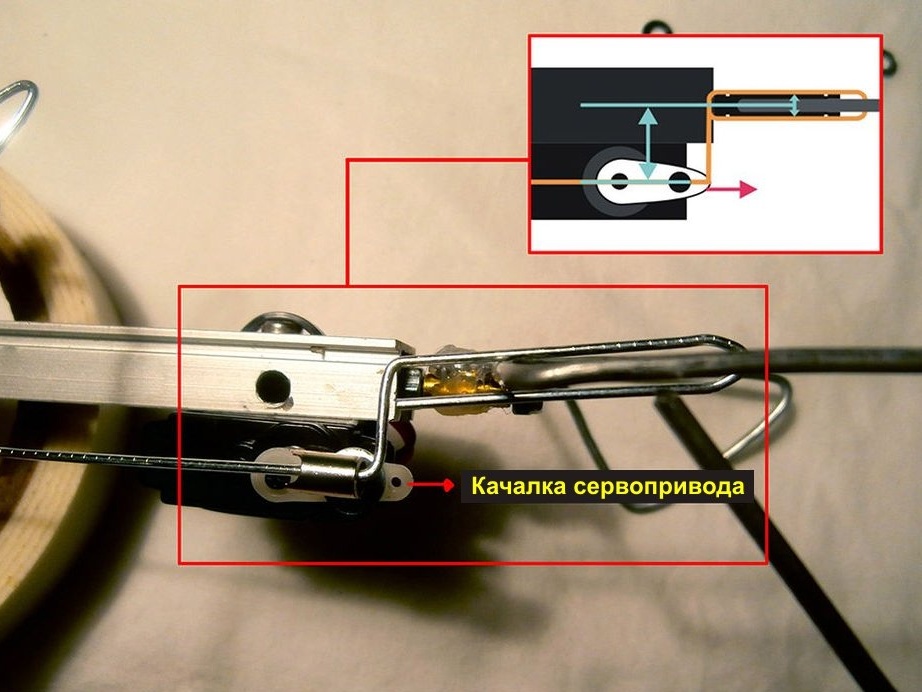
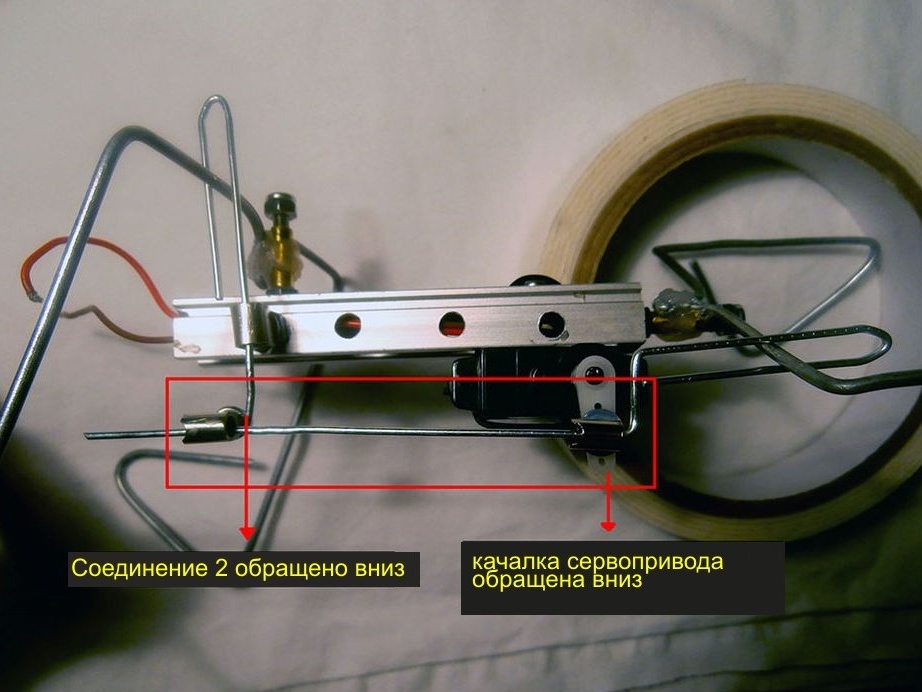
9 žingsnis: sankaba
10 žingsnis: sankabos tvirtinimas
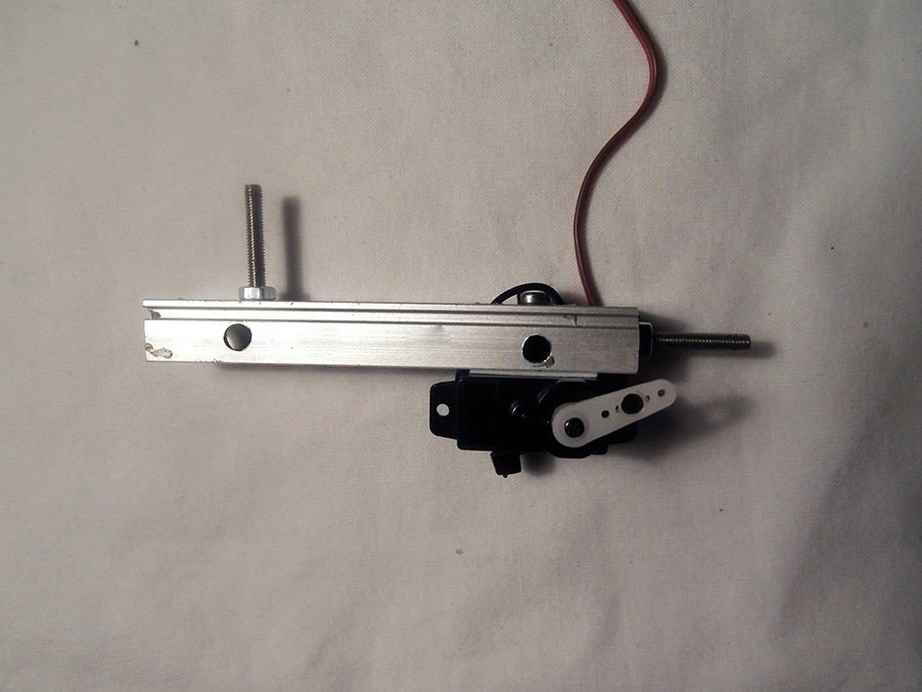
11 žingsnis: paskutiniai prisilietimai
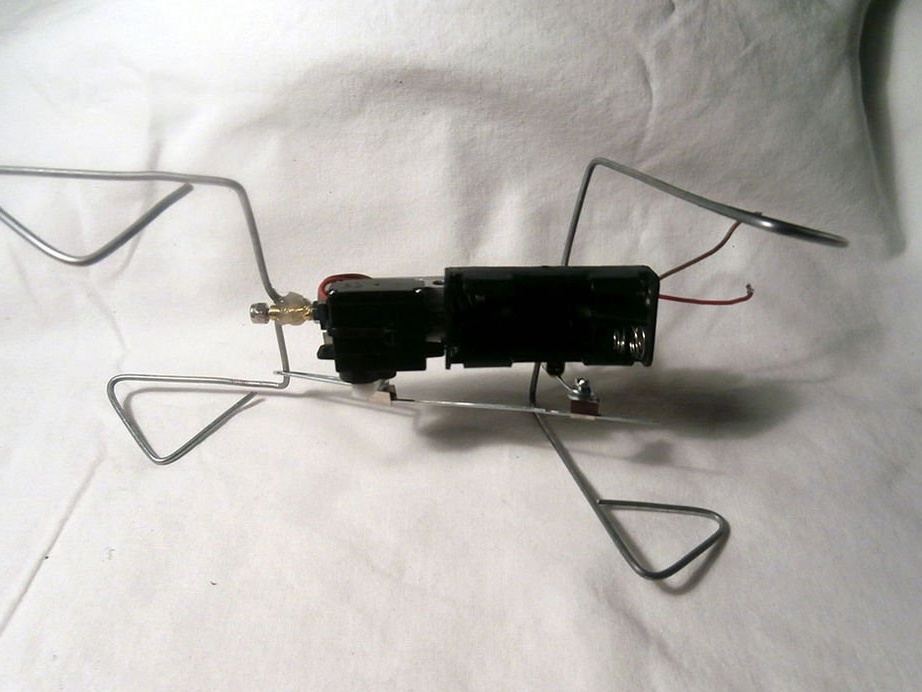
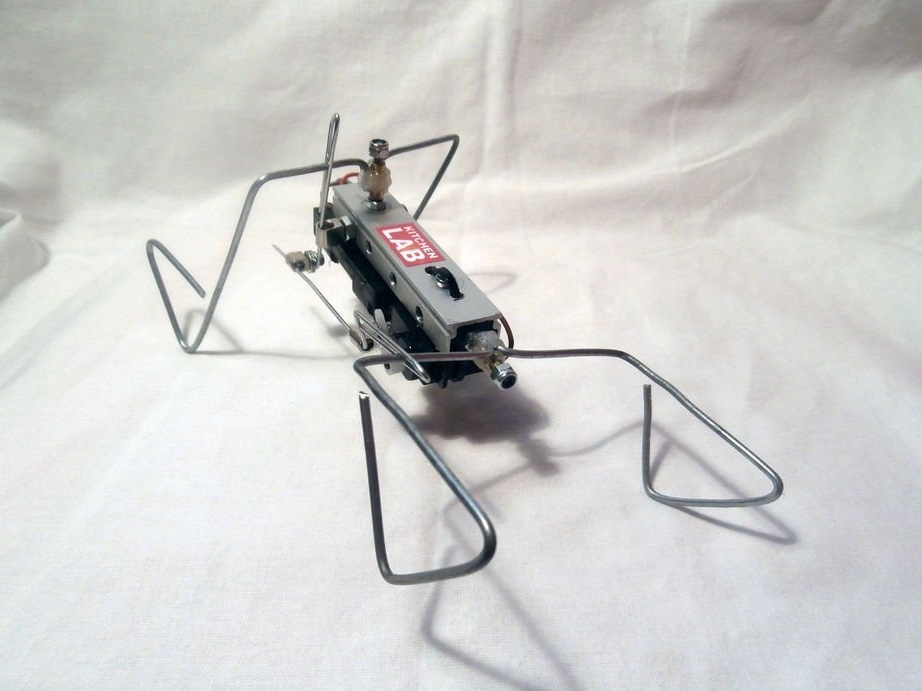
Galų gale tiesiog prijunkite servo ir akumuliatorių laidus ir robotas Pelėda pradės kelionę aplink jūsų namus :)