

Geros dienos arduino mėgėjams! Kai jis kabojo internete, atėjau gana linksmas straipsnis apie tai, kaip padaryti ranką manipuliatoriumi, kuris pakartoja žmogaus rankos judesius, įkvėptas paprastumo ir efekto. naminis namiškiai nusprendė jį kolekcionuoti. Aš radau lenkimo jutiklius ant siųstuvo rankos „Alliekspress“ ir šiek tiek numiriau, vienas dalykas stovėjo maždaug 15–20 USD, paaiškėjo, kad 5 iš šių jutiklių tik vienai rankai kainuos 75–100 USD, ir tai tik jutikliams! Po kurio laiko išmokau pasidaryti tokius jutiklius daryk patsPasirodo, labai paprasta ir pigu.
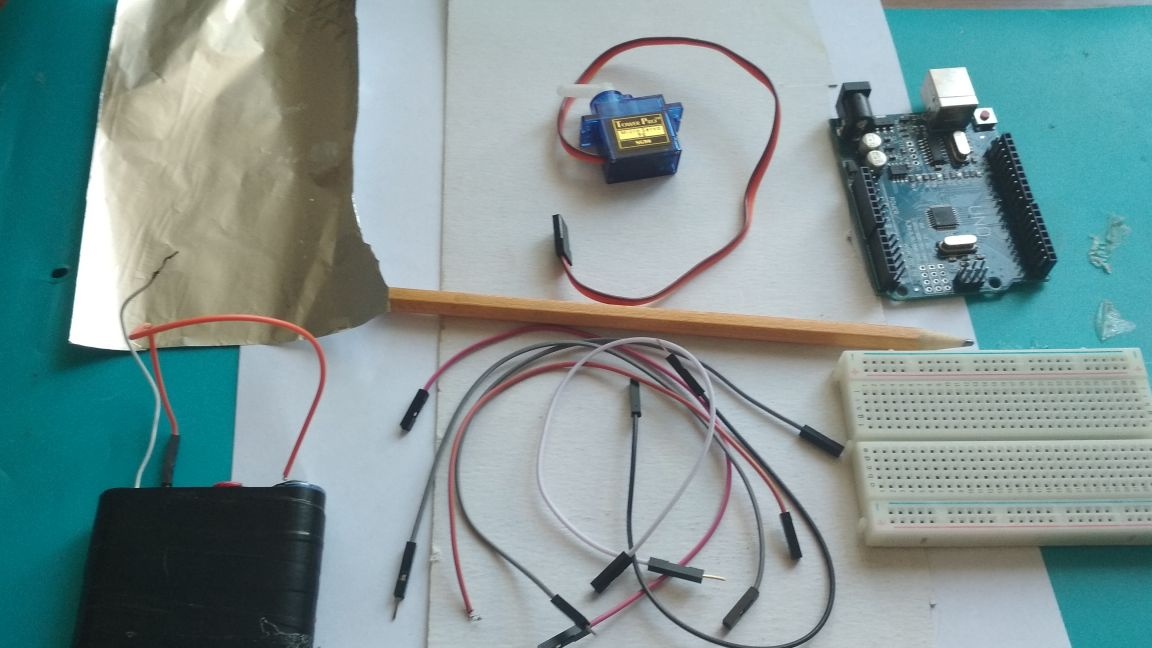
Taigi lenkimo jutikliui mums reikia:
mokėjimas Arduino Uno ()
-kraštinė lenta
- jungiamieji laidai, tokie kaip „tėvas-motina“ arba „tėvas-tėvas“
-servomotorinis
dėžutė
popierius
folija
pieštuku
- maitinimas nuo 6 iki 12 voltų (aš naudoju 4 baterijas, sujungtas nuosekliai 1,5 V įtampoje)
Iš reikalingų įrankių:
klijų pistoletas
žirklės
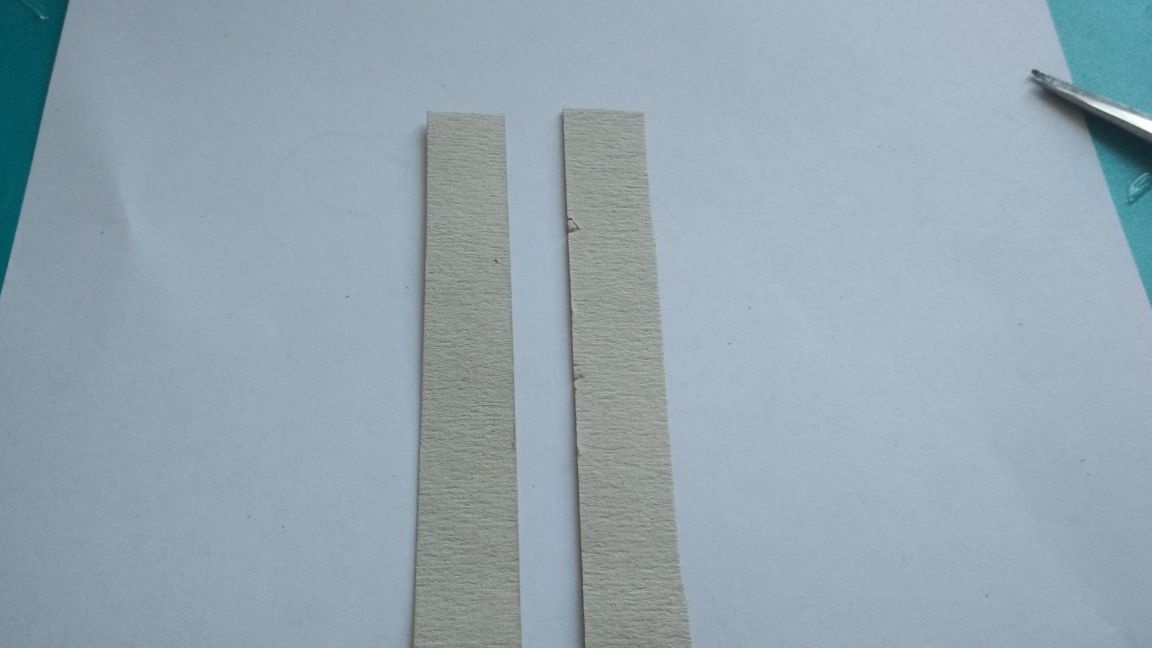
Taigi, pirmas dalykas, kurį mes iškirpėme iš kartono, yra dvi juostelės, 2 cm ilgesnės nei jūsų rodyklės pirštas, ir maždaug 1 cm pločio:

Šiek tiek mažiau iškirpkite tą pačią popieriaus juostelę:

Pieštukas kiek įmanoma geriau užmaskuokite abi popieriaus juostos puses:


Iškirpkite dvi folijos juosteles, mažesnes už popierių:
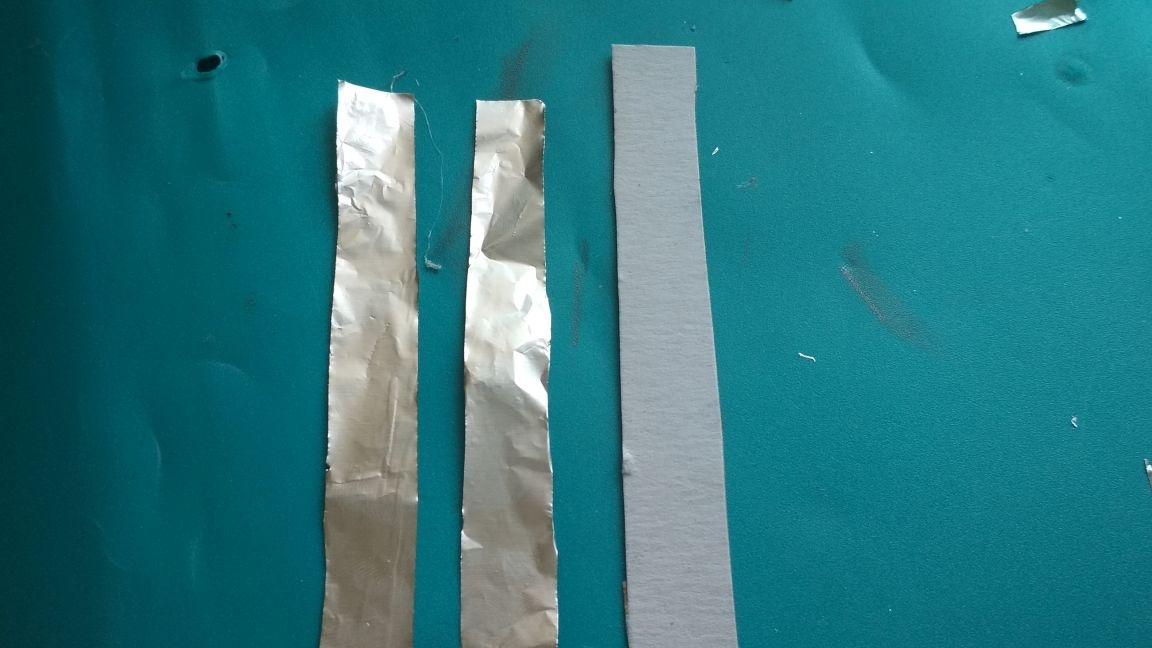
Klijuokite juos prie kartono juostelių, kaip parodyta nuotraukoje:

Iš jungiamųjų laidų „tėvas-motina“ mes nupjauname išėjimą „motina“ ir nuvalome jų galus nuo izoliacijos:
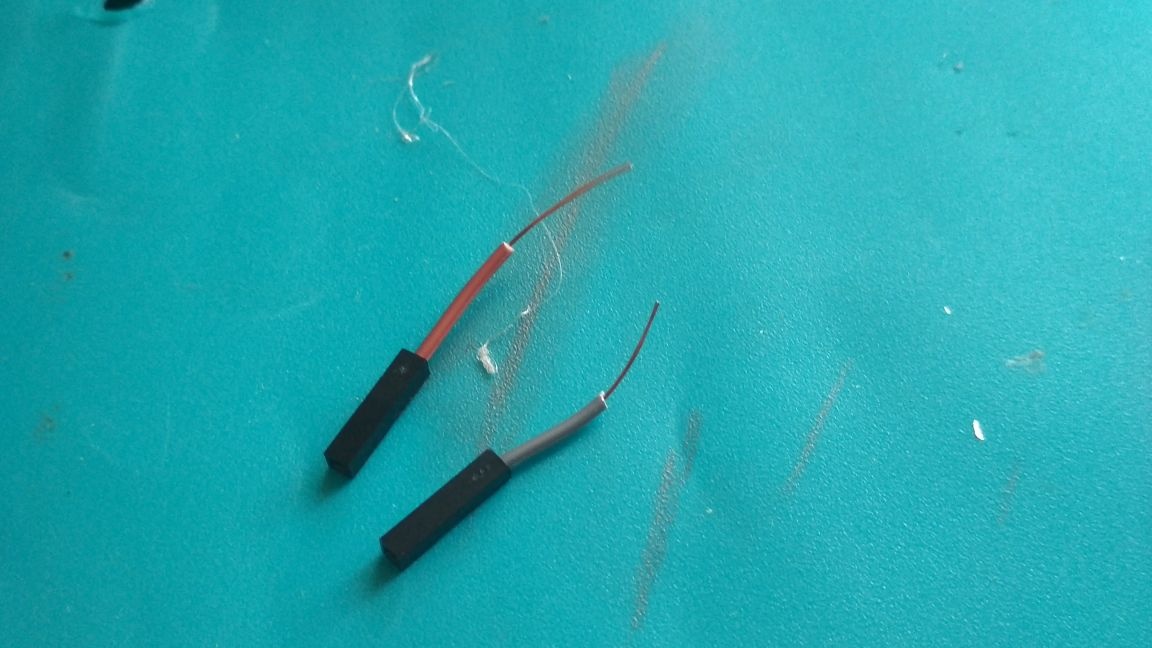
Mes pritvirtiname iš juostos ar litavimo:

Prie vienos iš pusių pritvirtiname popierinę juostelę, kad ji liečiasi su folija, tada antrą pusę uždengiame folija, šonus paspauskite ir priklijuokite:

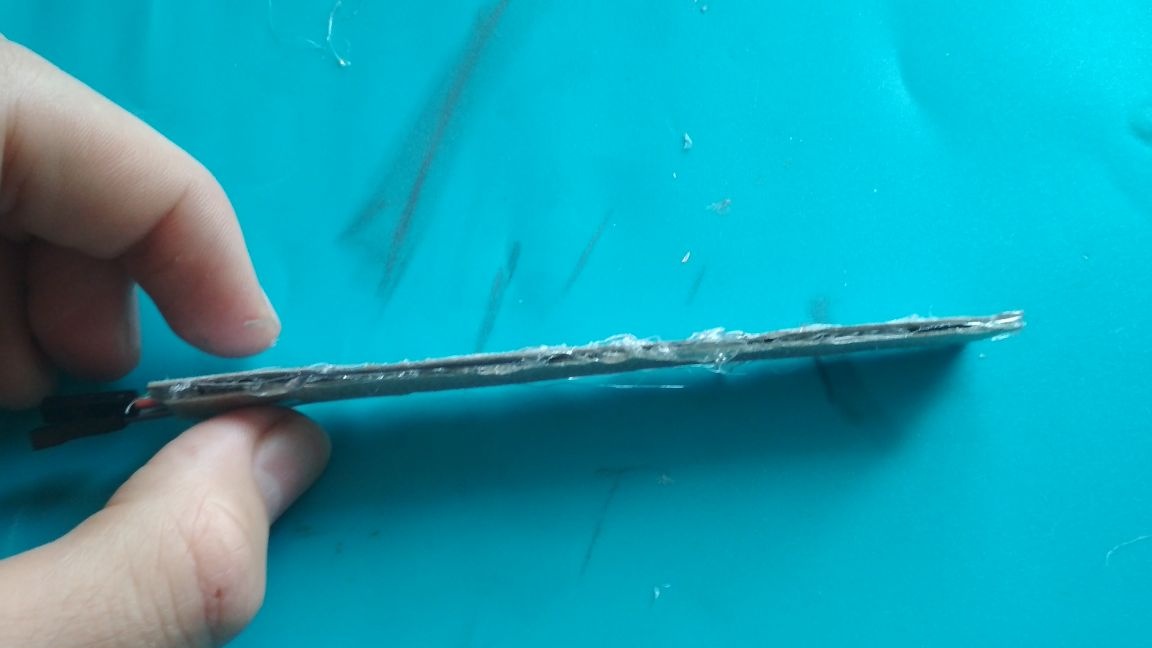

Iš kiekvienos pusės mes gaminame tokias „gyvates“ karštais klijais, jų reikia, kad dizainas būtų lankstesnis

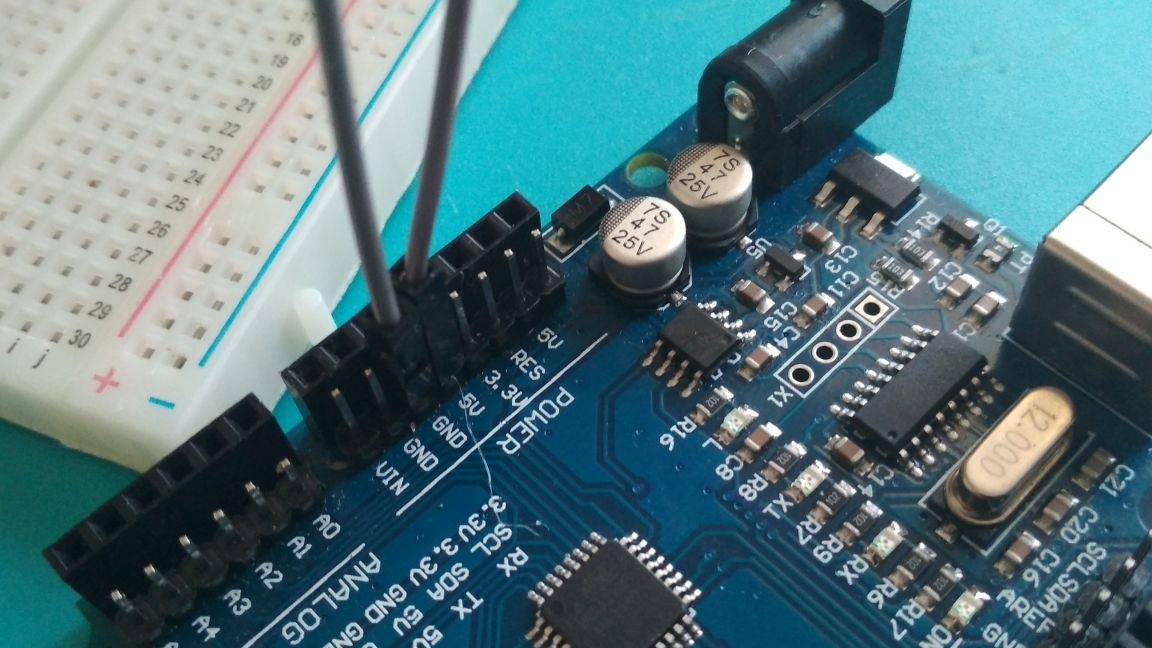
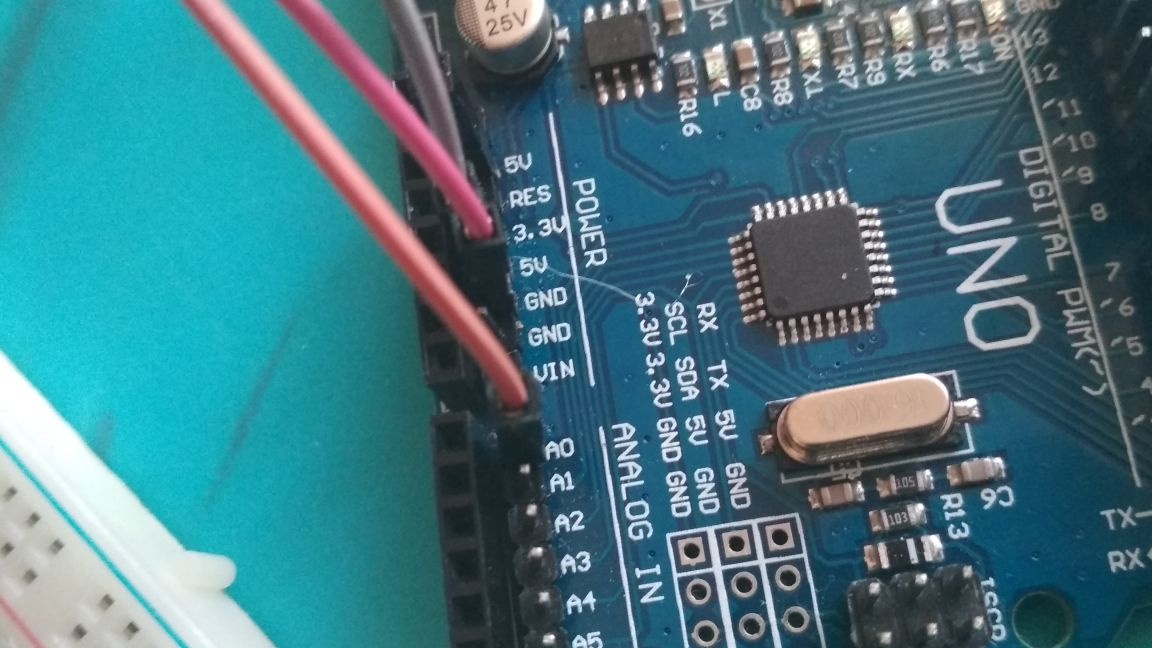
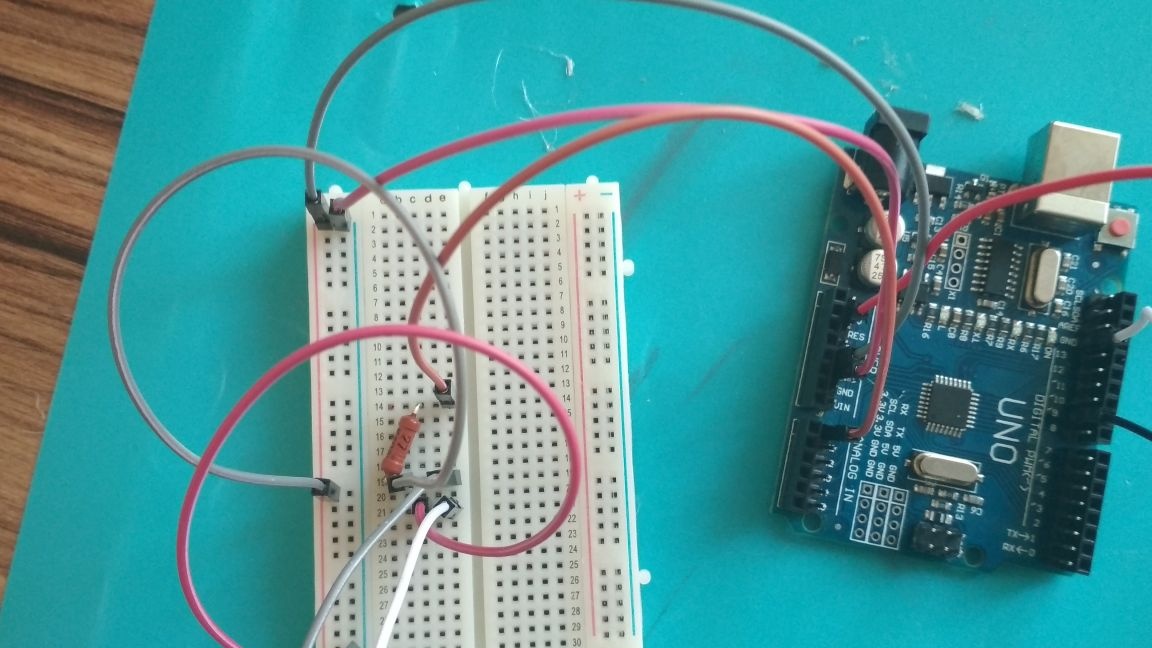
Mes paimame arduino ir prijunkite 5v išėjimą prie duonos lentelės pliuso, o Gnd - prie minuso:

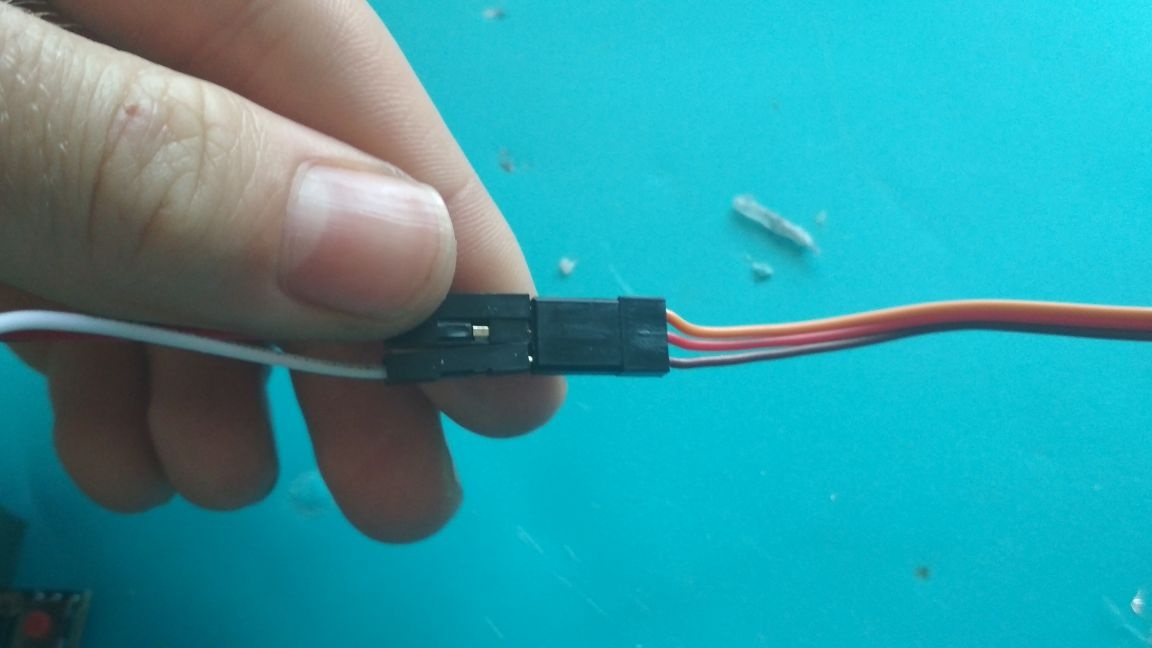
Prijunkite jungiamuosius laidus prie servovariklio ir prijunkite jį prie arduino taip:
Ruda viela gnd
raudona iki 5v
oranžinės spalvos iki 9 kaiščių
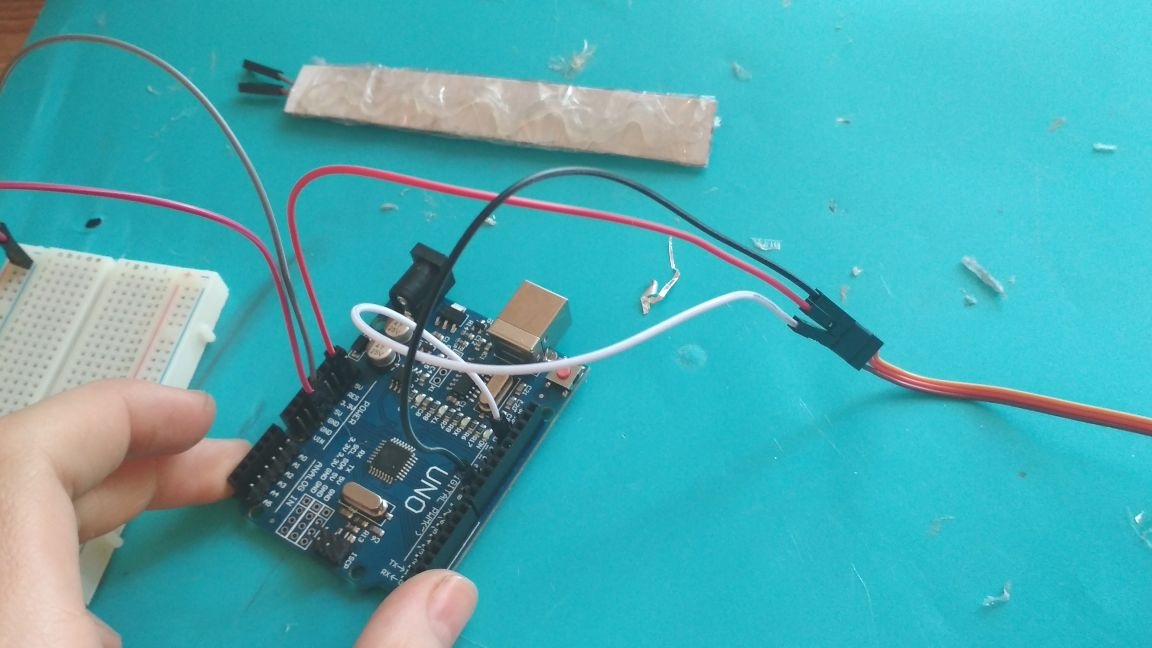
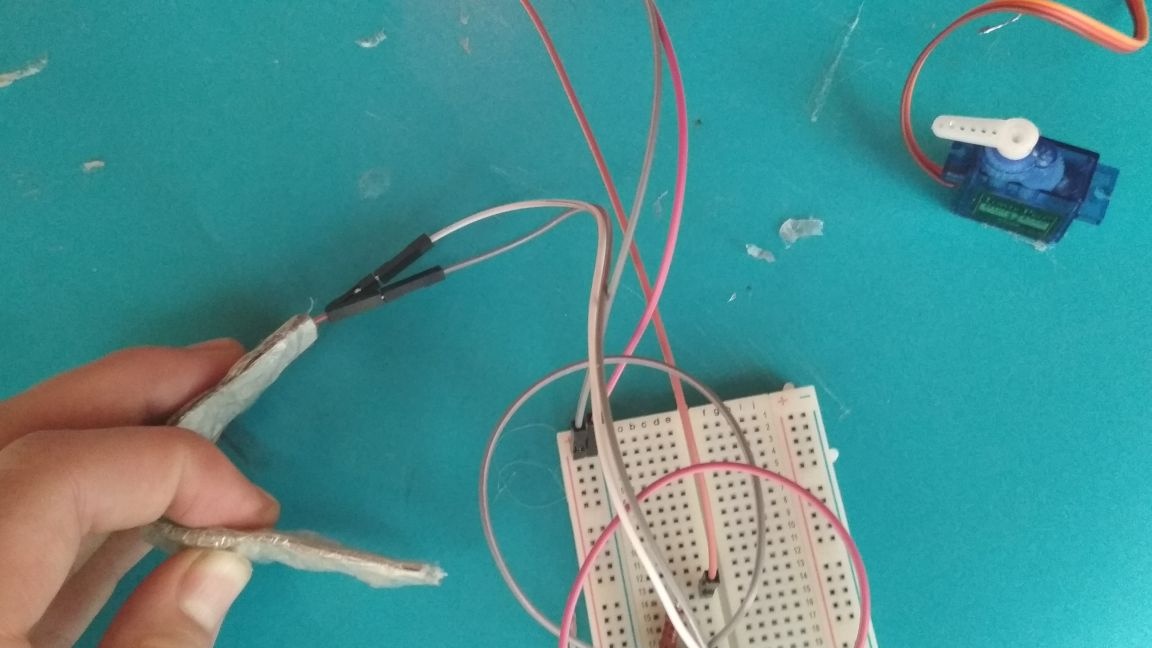
Prie mūsų lenkimo jutiklio pridėkite du laidus nuo tėčio

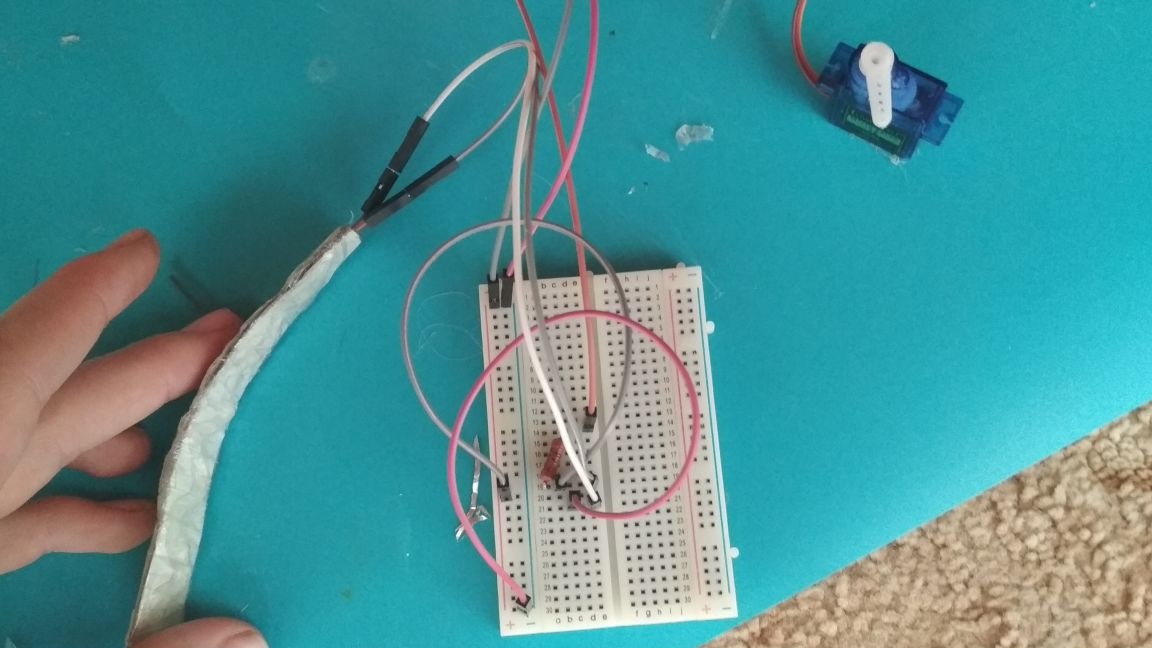
Prijunkite juos prie lentos:
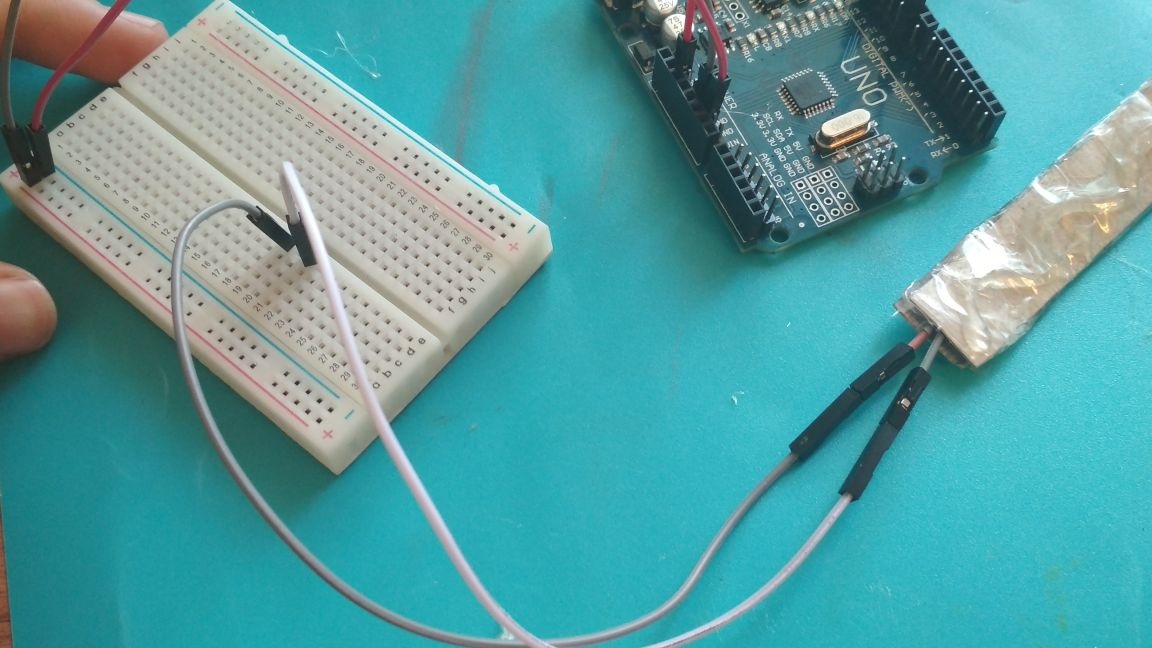
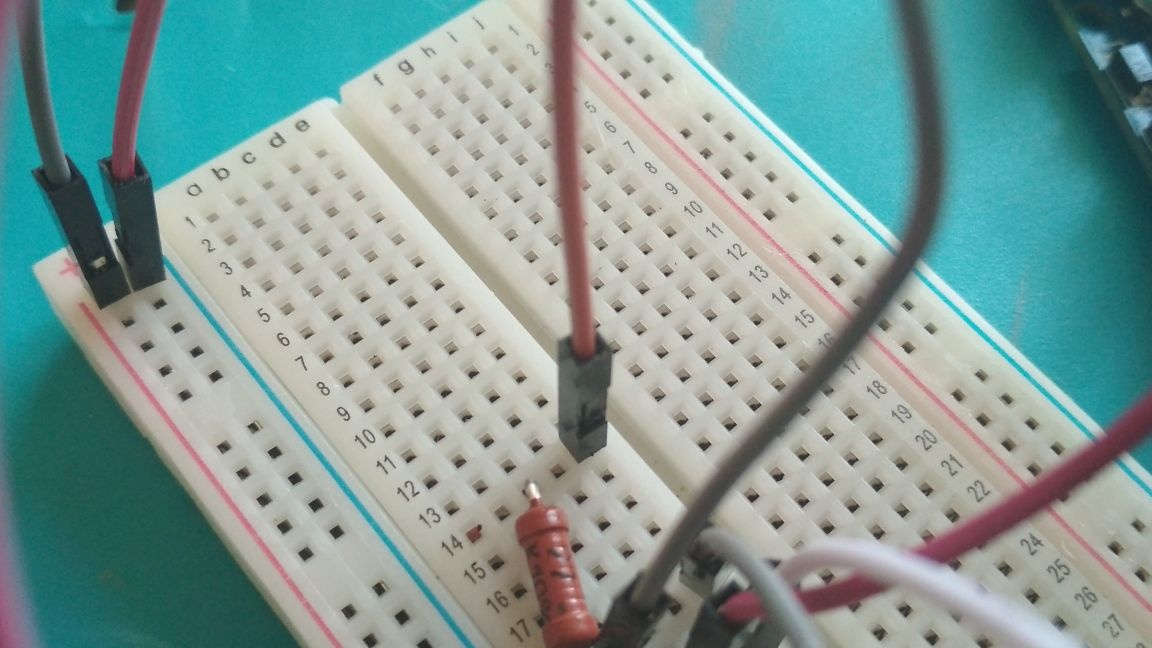
Vienas iš jutiklio galų yra prijungtas prie duonos plokštės pliuso per 22 kilovatų varžą (deja, aš jį sumaišiau ir prijungiau prie kitos išvesties, tačiau tai nereagavo į darbingumą), o kitas - į minusą:
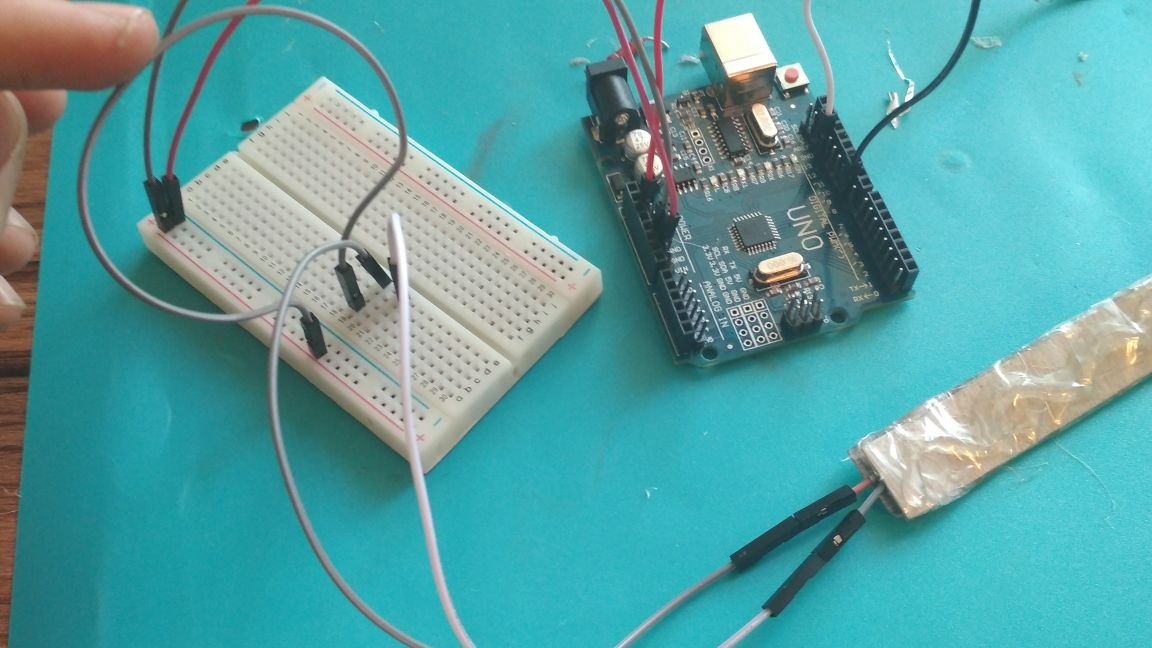
Ant tos „breadboarda“ linijos, ant kurios yra prie pliuso prijungto jutiklio galas, pridėkite kitą laidą ir išveskite jį į Arduino išvestį A0:
Dabar mes prijungiame „Arduino“ prie kompiuterio, paleiskite „Arduino IDE“ ir įkelkite į jį tokį eskizą:
# įtraukti
Servo servo1;
const int flexpin = 0;
negaliojanti sąranka ()
{
„Serial.begin“ (9600);
servo1.attach (9);
}
tuščia kilpa ()
{
int lankstumas;
int servoposition;
lankstymas = analogRead (flexpin);
servopozicija = žemėlapis (fleksija, 1018, 1023, 0, 90);
servoposition = suvaržymas (servoposition, 0, 90);
servo1.write (servoposition);
„Serial.print“ („jutiklis:“);
Serial.print (flexpozicija);
„Serial.print“ („servo:“);
Serial.println (servoposition);
vėlavimas (1000);
}Įjunkite prievado monitorių, prie kurio prijungtas „Arduino“, ir įkelkite eskizą

Dabar mes stebime pokyčius, kurie įvyksta uosto monitoriuje, kai mūsų jutiklis pasislenka, matome, kad 1023 yra 90 laipsnių, o 1020 ir 1019 yra 0, todėl mano atveju eskizo numerį 1018 keičiu į eskizą į 1020, galite turėti kitokį. Dabar 1020 yra 0 laipsnių, o 1023 yra 90 laipsnių. Atlikę visus pakeitimus, įkelkite naują pritaikytą eskizą į „Arduino“ plokštę


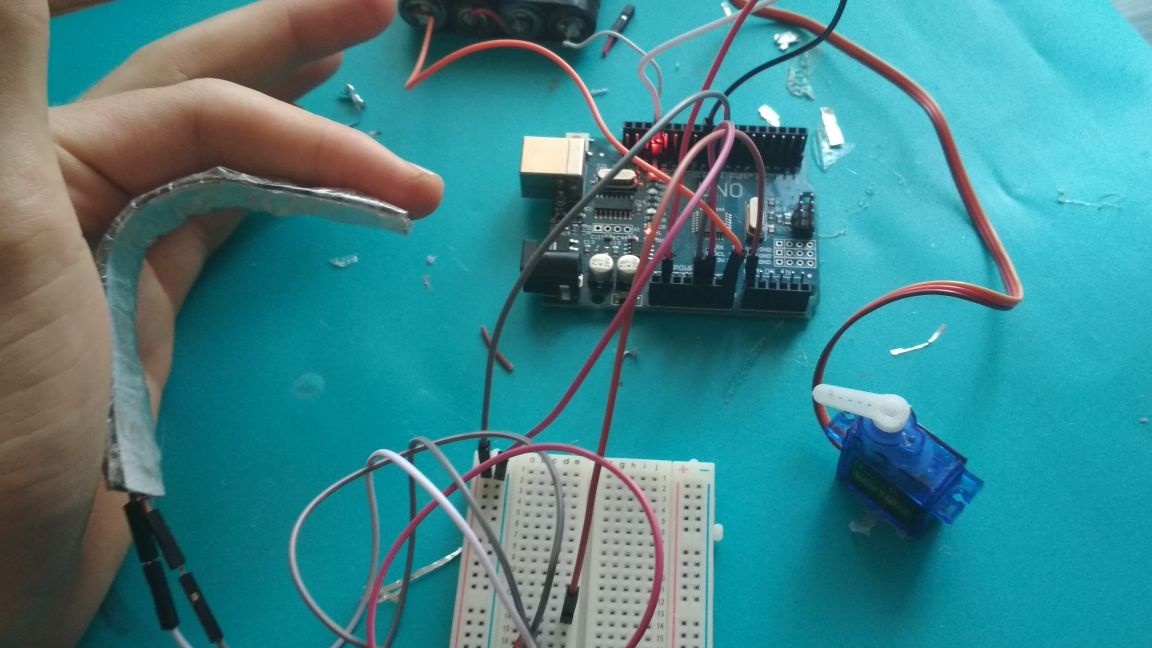
Na, viskas! Mūsų paprasčiausias ir, svarbiausia, pigus lenkimo jutiklis yra paruoštas!
Jei viskas bus padaryta teisingai, jutikliui sulenkus, „servo pavara“ pasisuks 90 laipsnių kampu, o pratęsusi ji grįš į pradinę padėtį. Žinoma, šio jutiklio tikslumas yra prastesnis nei įsigyto, tačiau jis tinka projektams, kurie nėra ypač supainioti, be to, jei viską darysi atsargiai ir gerai suderinsi, jis pasirodys beveik toks, kokį įsigijai. Tikiuosi, kad šis straipsnis kažkam naudingas.
Ačiū visiems už dėmesį!