
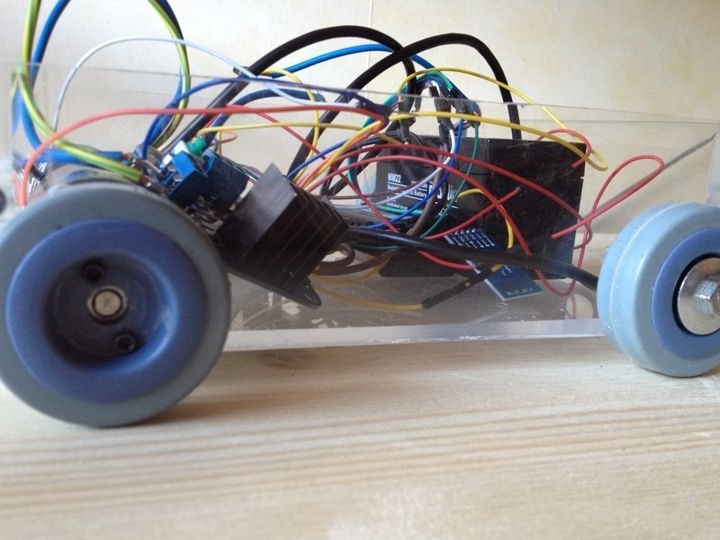
Tai vienas robotas valdomas „bluetooth“ išmaniuoju telefonu. Išmaniojo telefono pagreičio matuoklis matuoja telefono kampą į kairę / dešinę, aukštyn / žemyn, naudoja šiuos duomenis kryptinių variklių greičiui apskaičiuoti, duomenys perduodami „Bluetooth“ ryšiu į Arduino
Ko jums reikia norint sukurti robotą.
„Arduino uno“, „HC-06“ „Bluetooth“ modulis, du 300 RPM 12v pavarų varikliai, „H-bridge L298N Dual H Bridge“ variklio valdiklis
12 - 1,3 švino rūgšties akumuliatorius. Kiekvienas variklis sunaudoja 0,4A, pridėdamas vairuotojo logikos sąnaudas. „Arduino“ laidai, įprastos 9v baterijos ir jungtis akumuliatoriui prijungti prie „Arduino“. Elektriniai varikliai, skirti prijungti elektrinių variklių vairuotojus. USB kabelis. Telefonas su 4 ar naujesnės versijos „Android“. 4 pasukami 50 mm guminiai ratai iš „Screwfix“ arba „Toolstation“; du „Lynxmotion HUB-02“ universalūs stebulės.










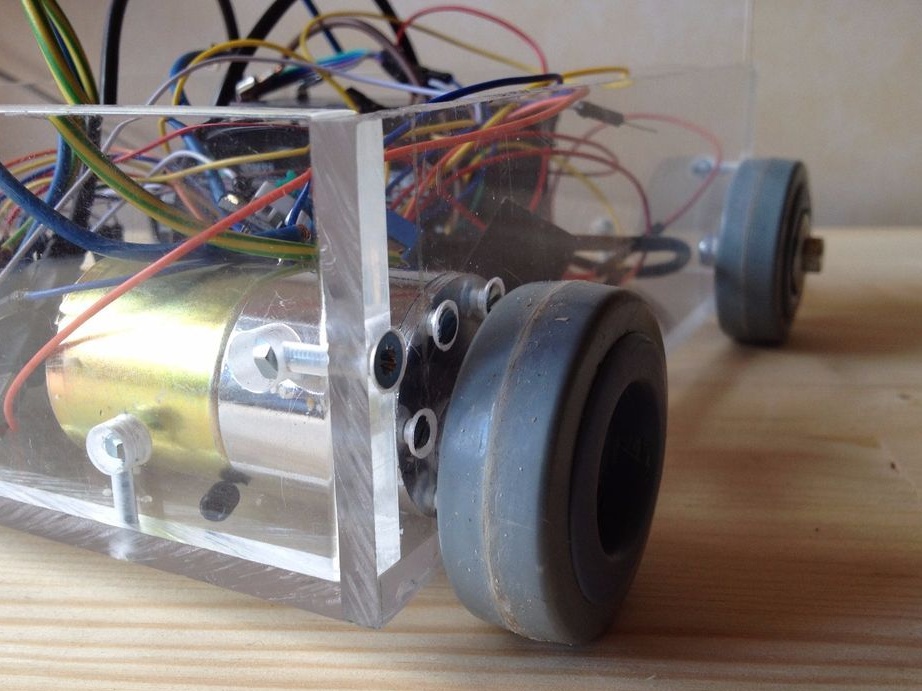
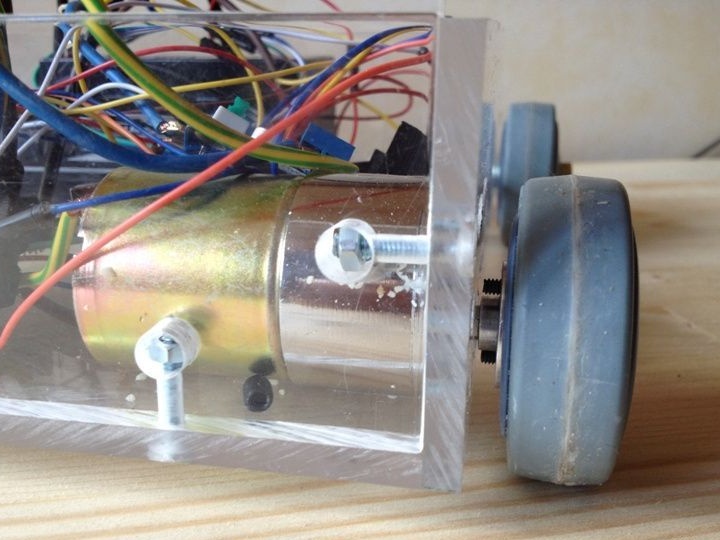
Korpusas surenkamas iš 22 cm ilgio ir 17 cm pločio plastiko. Du varikliai turi būti prijungti prie veleno ir pritvirtinti srieginiu kaiščiu.
Priekiniai ratai
Guma pašalinama iš ritinėlių ir jose gręžiamos dvi skylės pagal skylutes ant stebulių. Stebulės pritvirtintos prie ašių, einančių per korpusą, srieginiais kaiščiais. Po to ritinėliai pritvirtinami prie stebulių, o ant jų uždedama guma.
Galiniai ratai
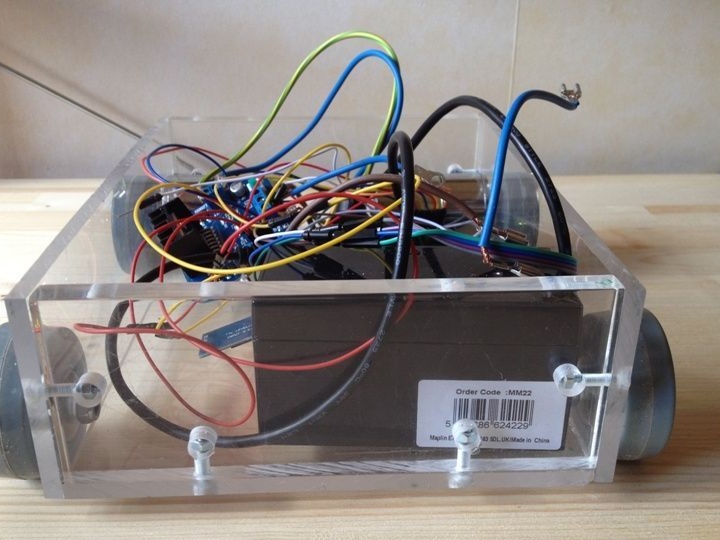
Užpakaliniai ratai tiesiog atsukami nuo vyrio ir tvirtinami per skylutes, išgręžtas korpuse.
Elektros jungtys.
Įkeliant programos kodą Arduino mieste, bus problemų. Taip yra dėl to, kad „Bluetooth“ modulis, jo RX \ TX kontaktai, yra prijungtas prie „Arduino“ 1 ir 2 kaiščių, kurie taip pat naudojami duomenims perduoti per USB. Prijungtoje bibliotekoje būtina pakeisti 1 ir 2 kontaktus į 11 ir 12, kurie bus naudojami duomenims perduoti.
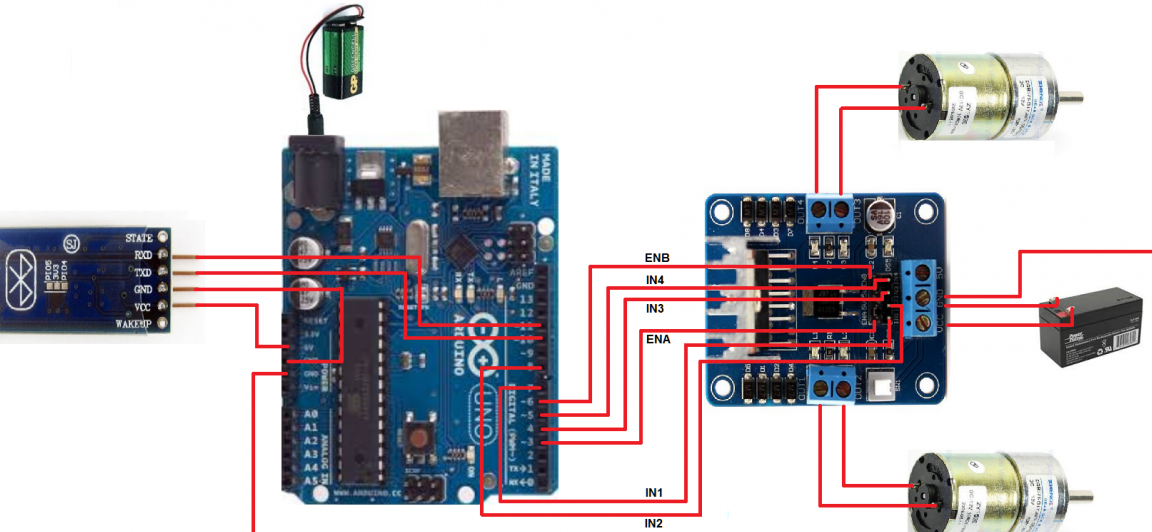
Variklio vairuotojui nereikia atskiro maitinimo šaltinio logikai. Vairuotojo logikai ir pačiam varikliui maitinti pakanka 12 V. Akumuliatoriaus minusas turėtų būti sujungtas tiek su Arduino, tiek su variklio vairuotoju. ECA / 5V ir ENB / 5V variklio vairuotojo kontaktus galima peršokti. Prieš prijungdami Arduino, jį reikia pašalinti. Nieko neturėtų būti prijungtas prie dviejų 5 V kontaktų.
„Android“ kodas.
Pridėtas failas turi būti išpakuotas ir importuotas į „Android Studio“, supakuokite jį į „apk“ ir įdiekite į telefoną.
Pagrindiniai failai:
Suporuotų įrenginių veikla:
„deviceList.java“
activity_device_list.xml
Šviesos diodų ir judesio valdymo veikla:
ledControl.java
activity_led_control.xml
Akivaizdus:
„AndroidManifest.xml“
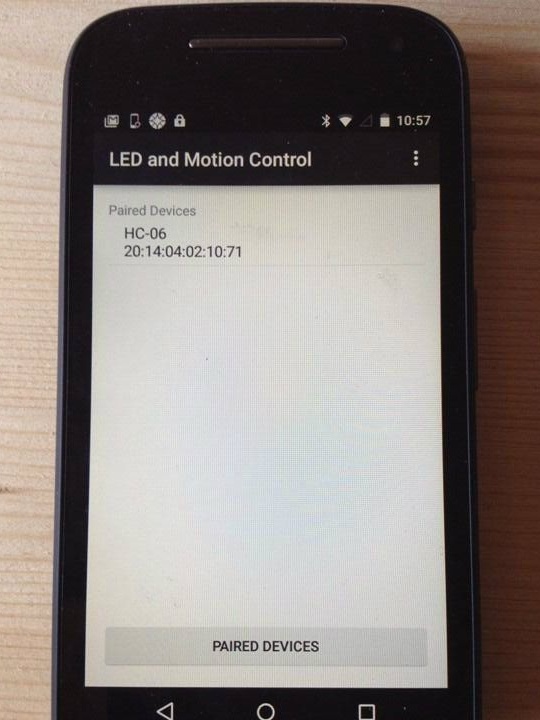
Suporuotų prietaisų veikla rodo galimus „Bluetooth“ įrenginius. Kai tik įrenginiai yra prijungti, valdymas perkeliamas į šviesos diodų ir judesio valdymo veiklą.
Įjungimo / išjungimo mygtukai siunčia „įjungimo“ arba „išjungimo“ pranešimą „Arduino“, įjungdami arba išjungdami įmontuotą šviesos diodą. Telefono akselerometras, kuris perduoda jutiklio x / y reikšmes kiekvieną kartą, kai šios vertės keičiasi, kontroliuoja judėjimą. Remdamasis tuo, Arduino apskaičiuoja variklių sukimosi greitį ir sukimosi kryptį diapazone nuo 0 iki 255. Jis perduoda šias Arduino reikšmes kaip „L-255:“ arba „R100“ ir kt. Remdamasis tuo, „Arduino“ siunčia kairiojo variklio sukimosi greičio komandas ENA, dešinę - ENB ir keičia sukimosi kryptį, pakeisdamas poliškumą į IN1, IN2 kairėje, N3 ir N4 dešiniajame variklyje.