

Robotas „Pasidaryk pats“ bus puikus žaislas vaikams, taip pat su juo galėsite žaisti artimuosius ar draugus. Roboto esmė yra tokia. Tai dėžutė su jungikliu. Kai tik kas nors spustelėja jungiklį dėžutėje, pradeda atsidaryti durys, iš kurių išlenda ranka ir grąžina jungiklį į pradinę būseną. Nepaisant išorinio roboto paprastumo, iš tikrųjų visa tai atrodo gana juokinga.
Roboto kūrimo pagrindas yra grandinė Arduino. Taip pat yra keletas mechaninių elementų, kurie bus aptariami toliau. Panagrinėkime išsamiau, kaip galima daryk pats surinkti tokį robotą.
Gamybos medžiagos ir įrankiai:
- „Arduino“ plokštė, bet kuri su PWM išėjimais, darys;
- servovarikliai, dviejų dalių (tinka modelis „Futaba“ - S3003, tokio variklio galios užtenka norint atidaryti duris, prietaisas sukuria iki 3,2 kg / cm galios);
- baterijos;
- SPST arba SPTT jungiklis;
- jungiklis akumuliatoriaus energijai valdyti;
- norint paleisti „Arduino“ reikia mygtuko;
- laidai, megztiniai ir kitos smulkmenos.

Be to, jums dar reikės greičių dėžės (tinkamos radijo bangomis valdomiems automobiliams), lentos elektriniam varikliui, vadinamam „Arduino“ variklio skydu, RC servovarikliui. Šie komponentai reikalingi tam, kad dėžutė, kaip ir autorius, judėtų.
Norint sumažinti triukšmo lygį prietaiso veikimo metu, reikalingi elektrolitinio tipo kondensatoriai, kurių nominali vertė yra 10mF, 10K rezistorius ir 74HC04 keitiklis.
Roboto gamybos procesas:
Pirmasis žingsnis. Kaip pasidaryti dėžutę
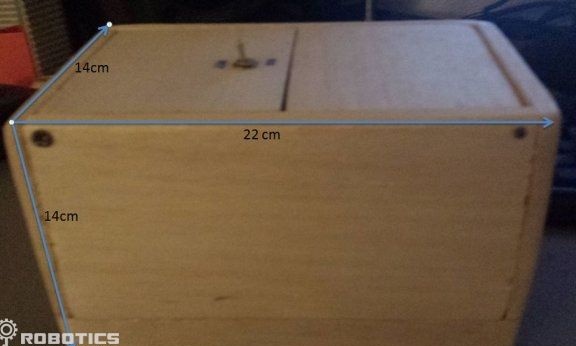
Norėdami sukurti dėžę, ty roboto kėbulą, turite rasti fanerą ar kamštieną. Be to, jums reikalingas galingas klijai medienai klijuoti. Svarbu suprasti, kad kuo daugiau konstrukcija svers, tuo daugiau energijos bus sunaudota. Dėžutės dydis yra 22cm x 14cm x 14cm.
Antras žingsnis Scheminė schema e dalys
Roboto viršuje yra „Arduino“ pagrindinė plokštė, dvi servos ir jungiklis. Kalbant apie grandinę, kuri yra atsakinga už triukšmo dydį, ją galima pakeisti įprastu rezistoriumi.
Servo pavaros maitinamos per penktąjį „Arduino“ plokštės kaištį. Kalbant apie signalo laidus, jie yra prijungti prie kontaktų 9 ir 10. Dėl šių PWM kontaktų kontroliuojamas servovariklių sukimosi kampas. Tai kampas nuo 0 iki 180 laipsnių.
Raudonas mygtukas reikalingas norint paleisti „Arduino“ iš naujo.
Grandinės apačioje yra „Arduino“ variklio skydo plokštė.Ant lentos galite pamatyti du kanalus A ir B, jų dėka, jei norite, galite vienu metu prijungti du variklius. Pagrindinė šios plokštės užduotis yra ta, kad su ja galite programiškai nustatyti bet kurio variklio kanalo sukimosi greitį, kryptį, pertraukas. Jei pažvelgsite į schemą, bus naudojamas kanalas B, o kontaktas 13 nustato kryptį, kontaktas 11 yra greitis, o kontaktas 8 yra naudojamas stabdžiams valdyti.
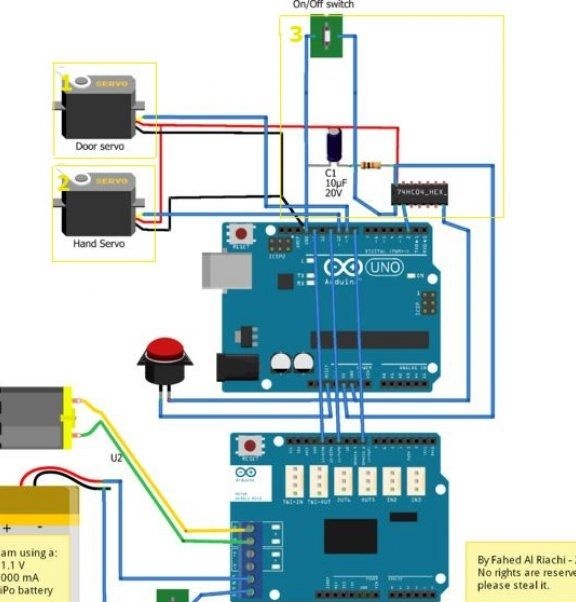
Maitinimo šaltinis yra 11,1 / 1000 mA baterija, ji jungiama prie „Arduino“ variklio skydo plokštės. Jei jis nebus naudojamas, tada akumuliatorius yra tiesiogiai prijungtas prie pagrindinės plokštės.
Trečias žingsnis Variklio montavimas
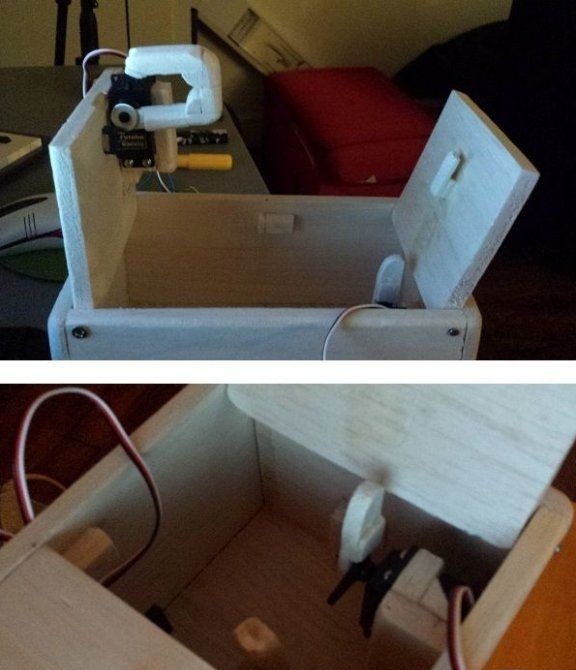
Servo pavara ir rankos yra sumontuotos eksperimentiškai, turite praktiškai patikrinti, ar mechanikai veikia tinkamai. Norėdami patikrinti variklių nuokrypio spindulį, galite naudoti „Arduino IDE“ programą.
Bet kurios rūšies rankomis pagamintai medienai gaminti. Svarbiausia, kad jis būtų lengvas, nes kitaip padidės energijos sąnaudos. Kalbant apie rankos dydį, ji koreguojama montuojant, pasirenkant norimą ilgį, pasiekiamas norimas efektas.
Dangtelio stūmiklis ir ranka yra sumontuoti taip, kad darbo metu jie neliestų servovariklio.
Ketvirtas žingsnis Mes prijungiame servovariklį ir perjunkite į Arduino
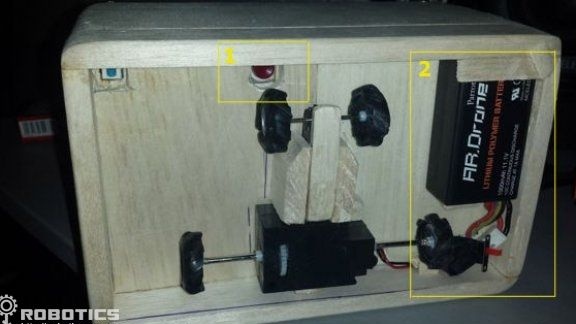
Naudodami laidus ir džemperius, pagal nurodytą schemą turite visus elektroninius elementus sujungti vienas su kitu. Laidai turi būti nutiesti taip, kad jie netrukdytų judantiems roboto elementams.
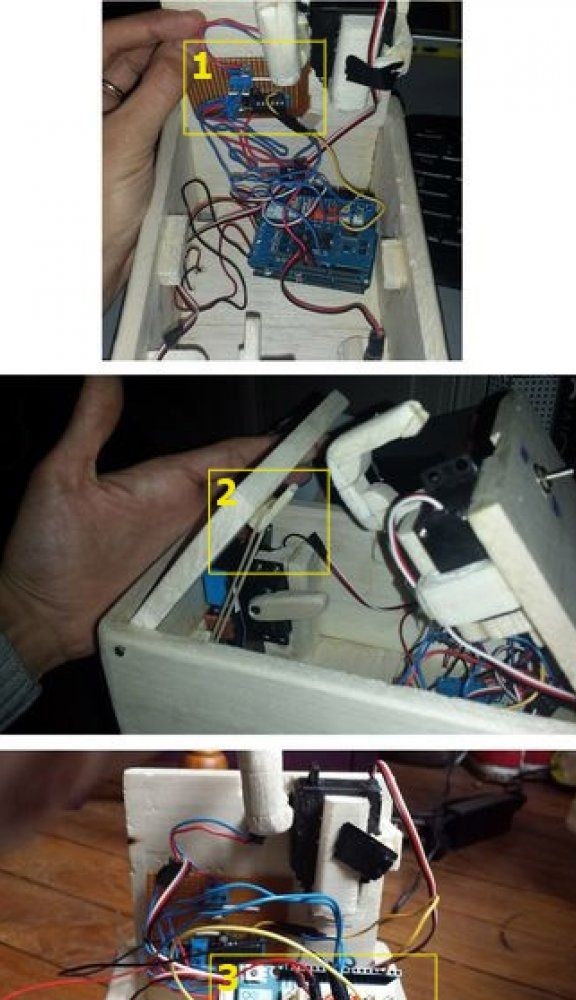
Po numeriu 1 galite pamatyti, kaip jis yra prijungtas ir kur yra perjungimo grandinė. Skaičius 2 žymi tokį elementą kaip elastinę juostą, jis reikalingas tam, kad durys atsidarytų su tam tikra įtampa. Na, skaičius 3 rodo variklio skydelį, įmontuotą Arduino.
Penktas žingsnis Mechaninės dėžutės perkėlimo dalies įrengimas
Dėžutės apačioje yra akumuliatorius, variklis su ratukais, greičių dėžė, atstatymo mygtukas ir perjungimo jungiklis roboto galiai valdyti. Prieš pritvirtindami elementus, turite apskaičiuoti dėžutės svorio likutį. Kad robotas būtų stabilus, be priekinės ašies, yra sumontuotas dar vienas papildomas.
Šeštas žingsnis Dar viena papildoma funkcija
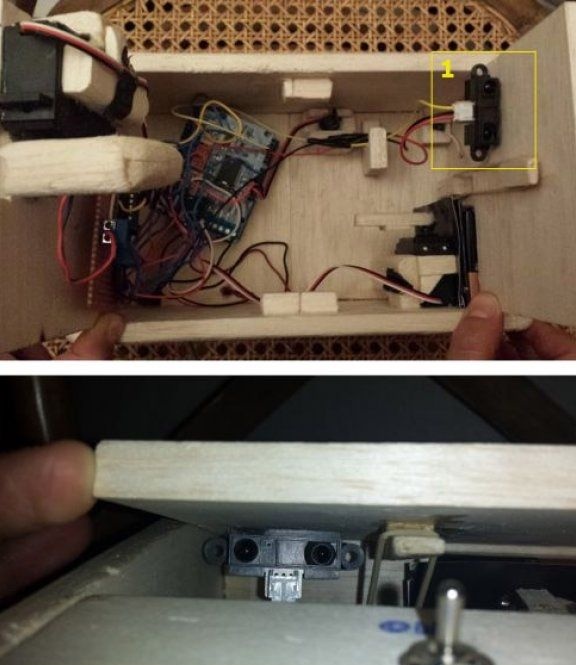
Tam, kad robotas galėtų nustatyti judėjimo kryptį, jame gali būti įmontuotas IR jutiklis. Tuo pačiu metu, kai kas nors bandys paliesti perjungimo jungiklį, dėžutė judės į dešinę ir į kairę. Šiems tikslams tinka GP2Y0A21 jutiklis, jis turi tris laidus. Geltona turi būti prijungta prie trečiojo Arduino kaiščio, raudona - prie 5 kaiščio, o juoda - su žeme.
Štai viskas, paprastas ir tuo pačiu juokingas robotas yra paruoštas. Toks žaislas suteiks džiaugsmo ne tik vaikui, bet ir nustebins daugelį suaugusiųjų.
Firmware: