Meistras surinko šią frezavimo mašiną daugiausia iš turimų medžiagų.
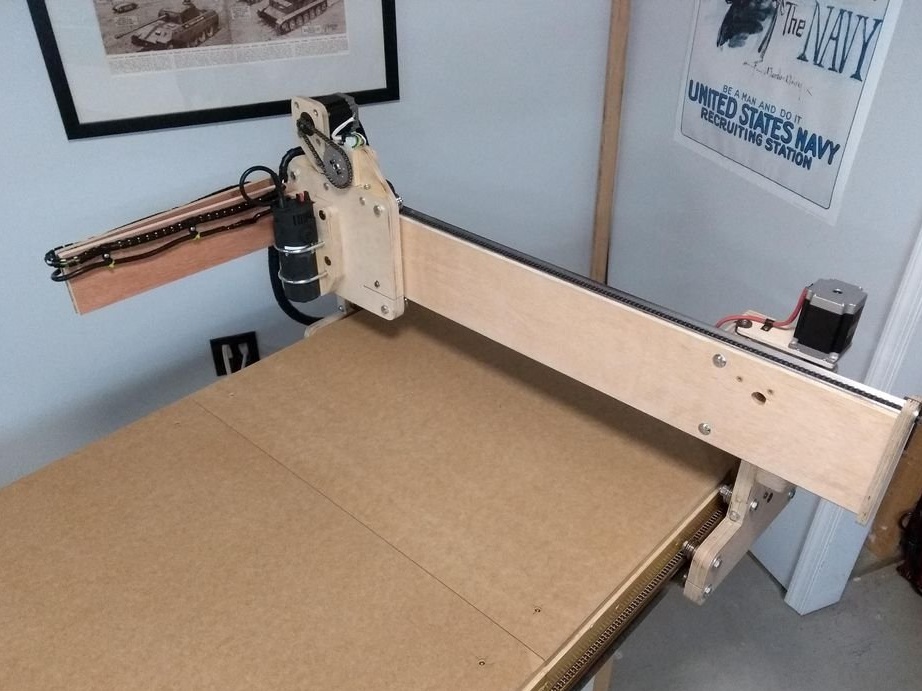
Tai yra klasikinis trijų ašių frezavimo staklės. Jis turi portalą, kuris juda išilgai pagrindo ilgio (Y ašies). Yra vežimėlis, ant kurio yra sumontuotas maršrutizatorius, ir jis juda pirmyn ir atgal (X ašis). Ir yra mechanizmas, kuris kelia ir nuleidžia maršrutizatorių aukštyn ir žemyn (Z ašis). Judėjimui meistras naudoja žingsninius variklius ir grandines. Linijiniams bėgiams naudojami plieniniai V guoliai, kurie tęsiasi per plieninį kampą. Vedlys nepateikia išsamių nurodymų, tik bendrąją idėją ir idėjas.
Įrankiai ir medžiagos:
- naktinis stalas;
-Durys;
-Rulonai;
-Metalo kampelis;
-Fanera;
-Tvirtinimo detalės;
-Gręžimas;
Frezavimo pjaustytuvas;
-Sauga;
-Vyras;
-Cheinas;
-Srieginis strypas;
-Pakopiniai varikliai;
-Žvaigždės;
- guoliai;
-Dulkių siurblio adapteris;
-Arduino;
- „Estlcam“ valdiklis;
- kieto būvio relė;
-Maitinimas;
-Pakopiniai vairuotojai;
Pirmas žingsnis: Stalas
Meistras perrašė stalą iš senojo naktinio staliuko. Kaip stalviršis, meistras prikalė prie stalo medines duris. Žemiau buvo sumontuoti ritinėliai.



Antras žingsnis: Bėgiai
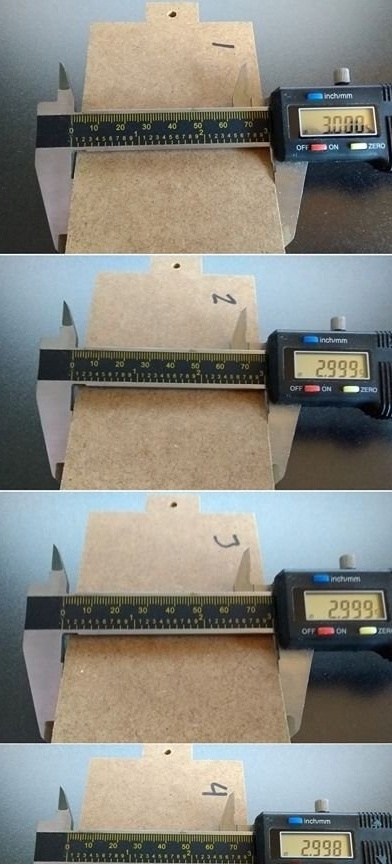
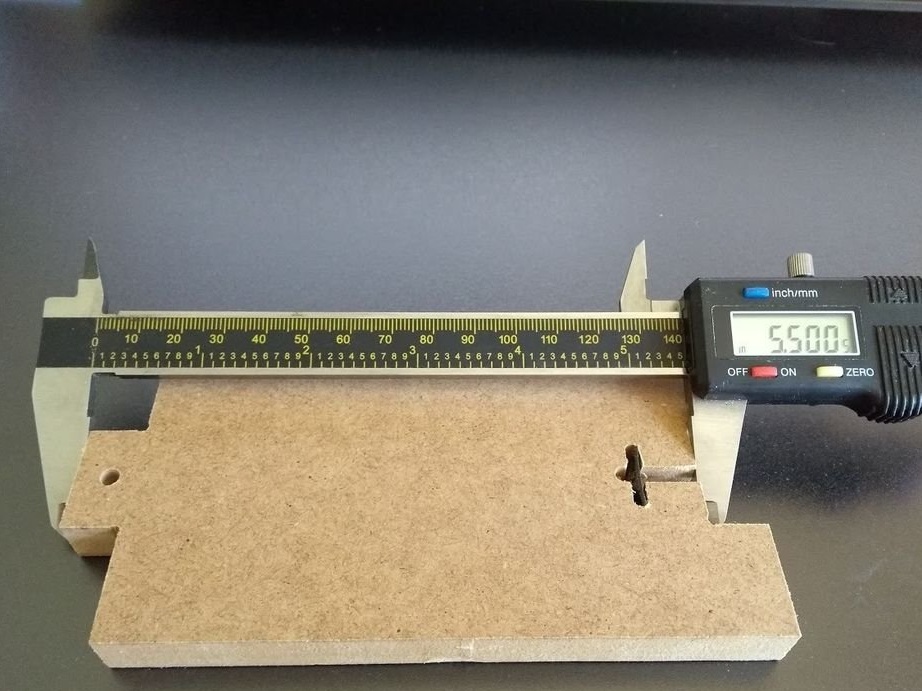
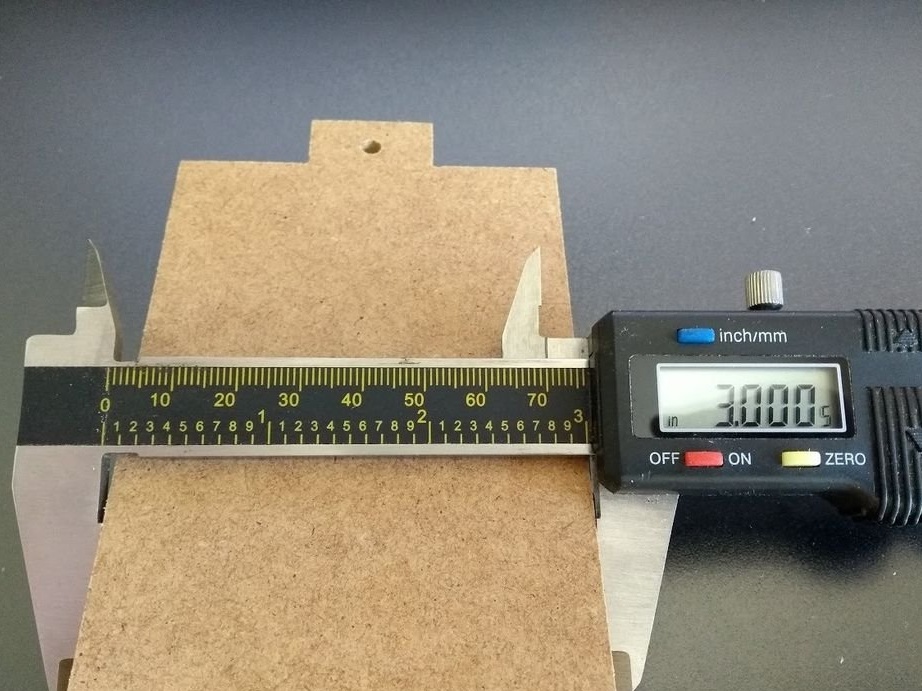
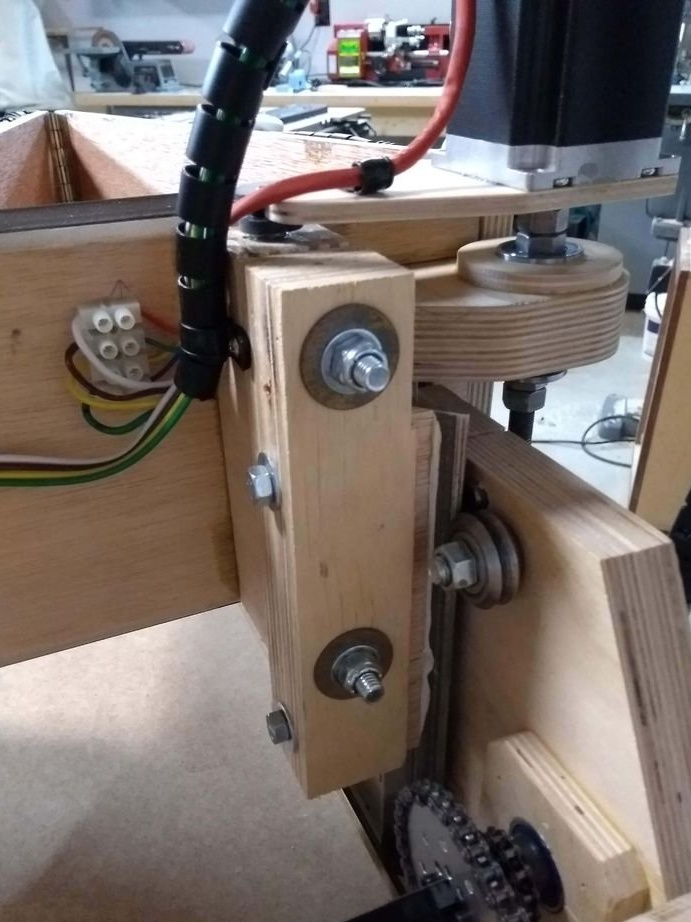
Meistras kaip vadovą naudoja metalinį kampą. Ant faneros ruošinio meistras pritvirtina keturis guolius grioveliu. Aišku, kad kampas pritvirtintas iš abiejų stalo pusių.




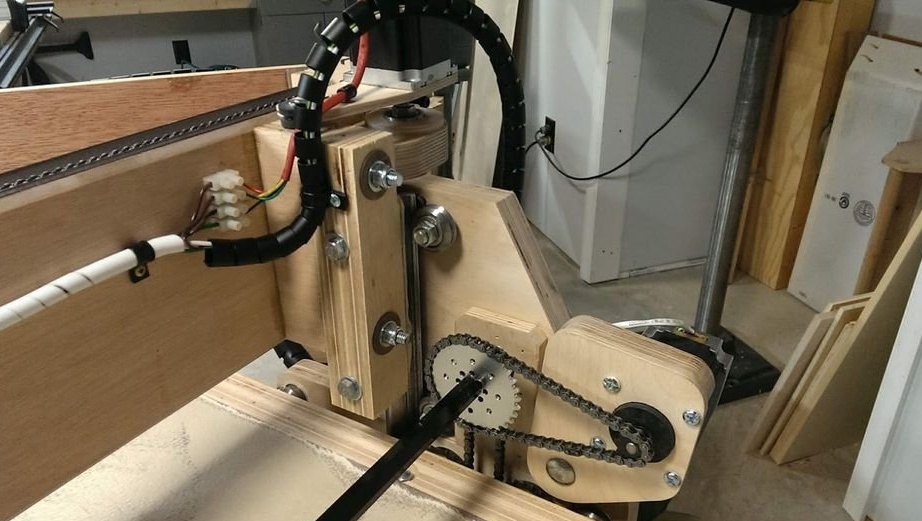
Trečias žingsnis: portalas
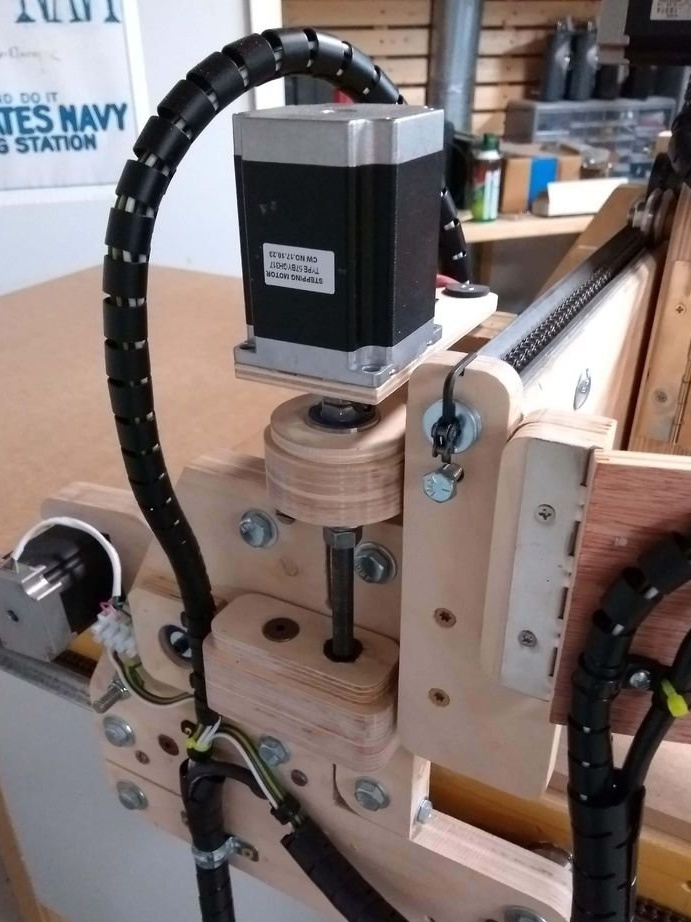
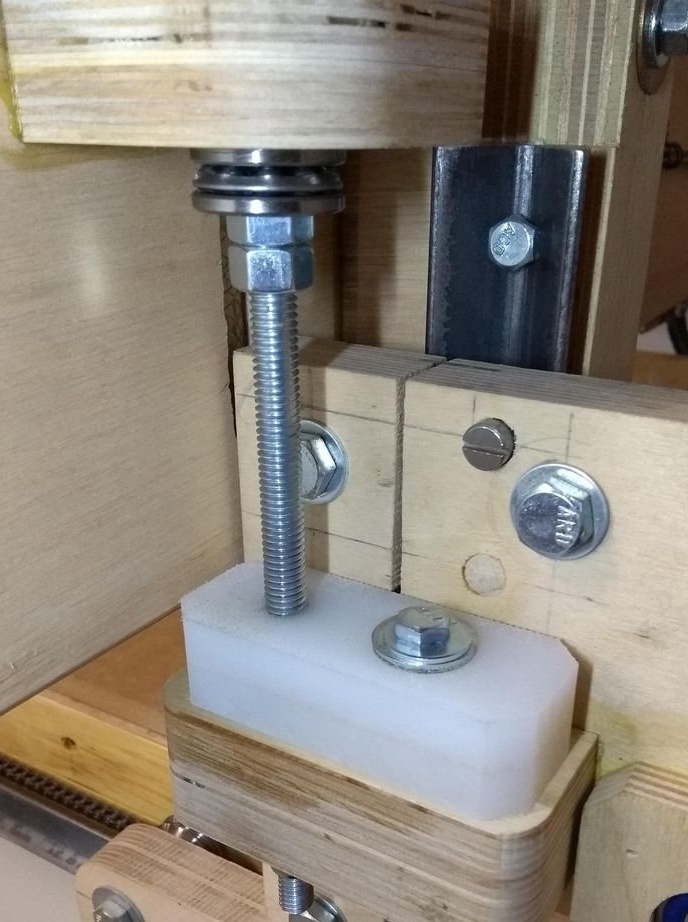
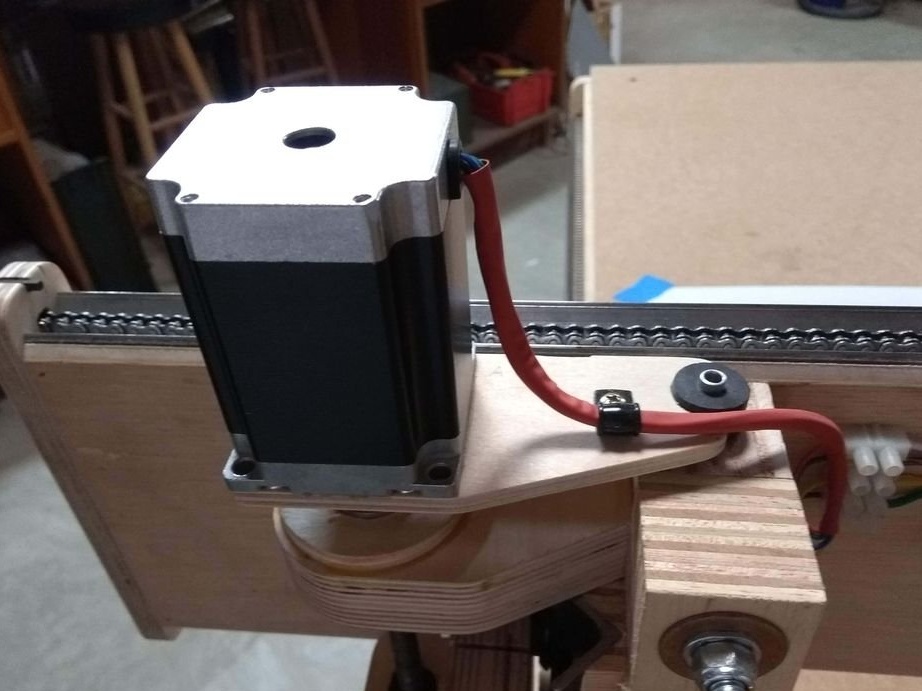
Portalas pastatytas iš dviejų tarpusavyje suklijuotos faneros sluoksnių. Ant skersinės portalo detalės sumontuotas frezavimo staklės. Skersinė dalis kartu su freza juda aukštyn / žemyn tais pačiais bėgiais, kaip ir ankstesniame žingsnyje. Sumontuoti du pakopiniai varikliai, kurie judėtų išilgai kraštų. Meistras pritvirtino ilgus varžtus prie variklių ašių. Apačioje yra mazgas su riešutais. Gavus komandą, varikliai pradeda veikti, velenai sukasi, o freza nuleidžia arba pakyla.
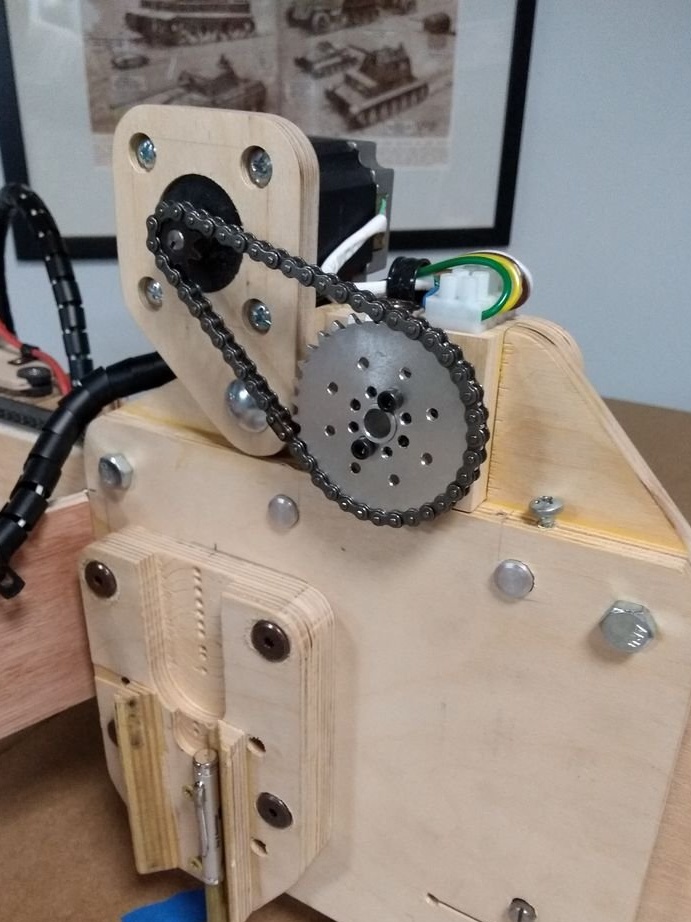
Norėdami perkelti vežimėlį su malūnu Z ašyje, meistras naudoja žingsninį variklį ir grandininę pavarą.





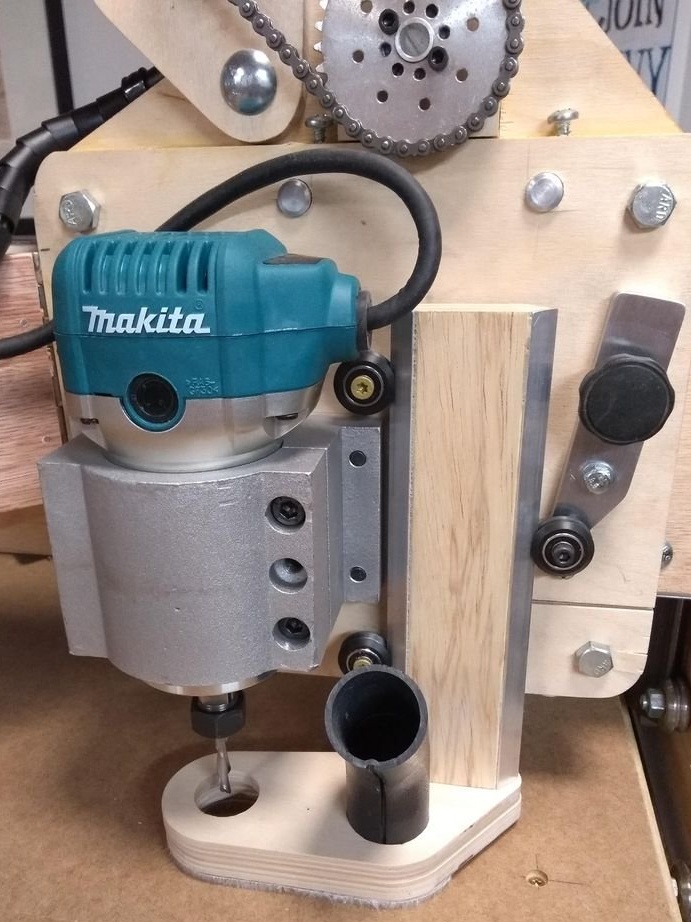
Ketvirtas žingsnis: Frezavimo pjaustytuvas
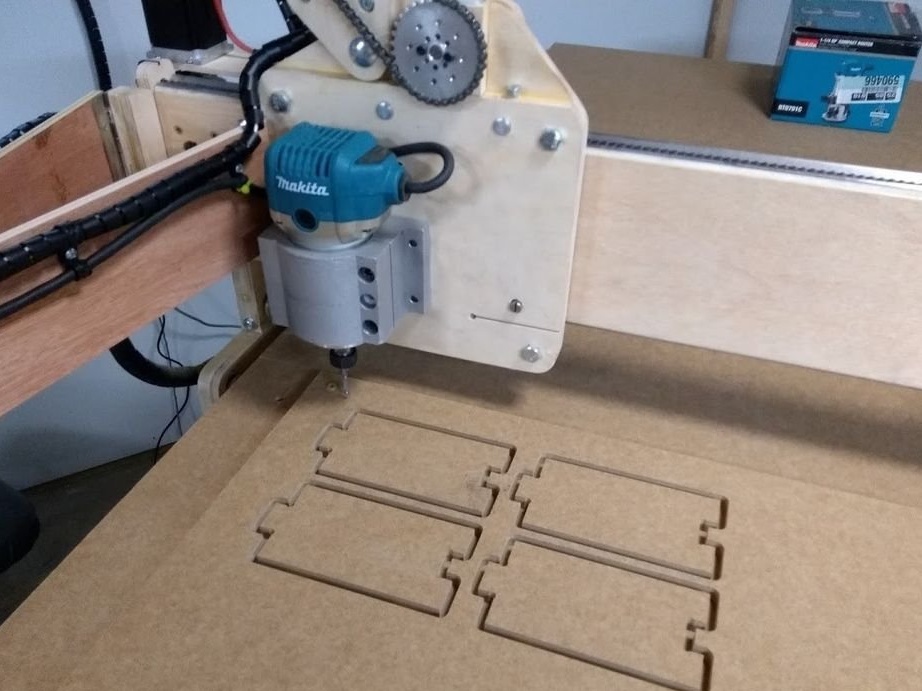
Įrenginyje įdiegtas „Makita RT0701C“ maršrutizatorius. Taip pat meistras montuoja adapterį, skirtą dulkių siurblio žarnoms prijungti.



Penktas žingsnis: valdymas
Vadybos sistema pagrįsta Arduino UNO ir nedidelis kompiuteris su „EstlCAM CNC“ programine įranga.
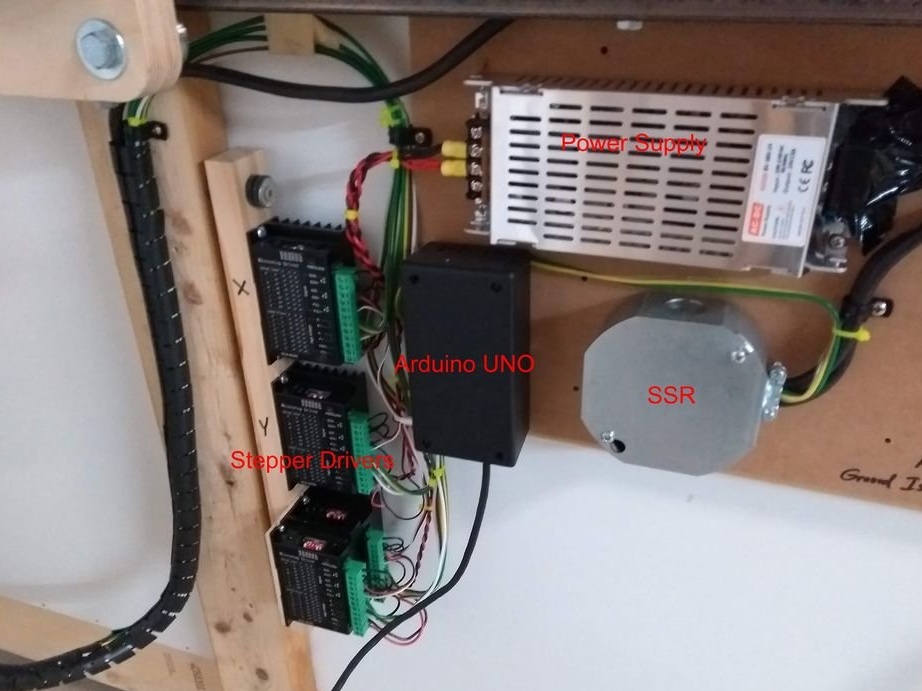
„Arduino Uno“ yra įmontuotas mašinos gale ir palaiko „Estlcam“ valdiklio programinę įrangą. Elektros dėžutėje yra 10A SSR (kietojo kūno relė), kuri įjungia ir išjungia maršrutizatorių. Kairėje pusėje yra žingsnių pavaros TB6600 ir maitinimo šaltinis 24 V, 15 A. Varikliams laidai eina per gofrą. „Windows 10“ asmeninis kompiuteris rodo vaizdą monitoriuje ir yra valdomas belaidės pelės bei klaviatūros.
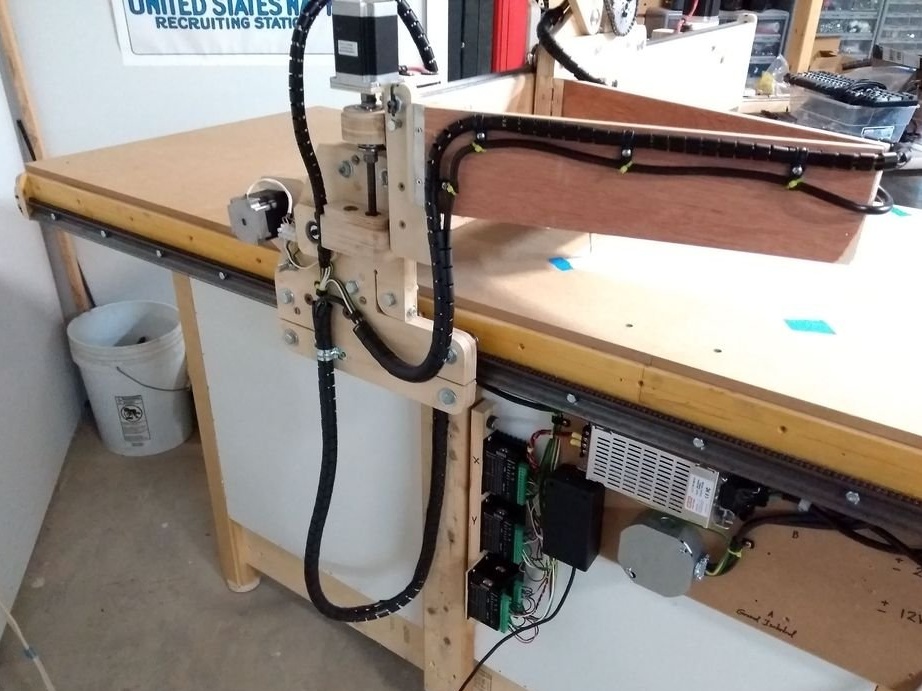

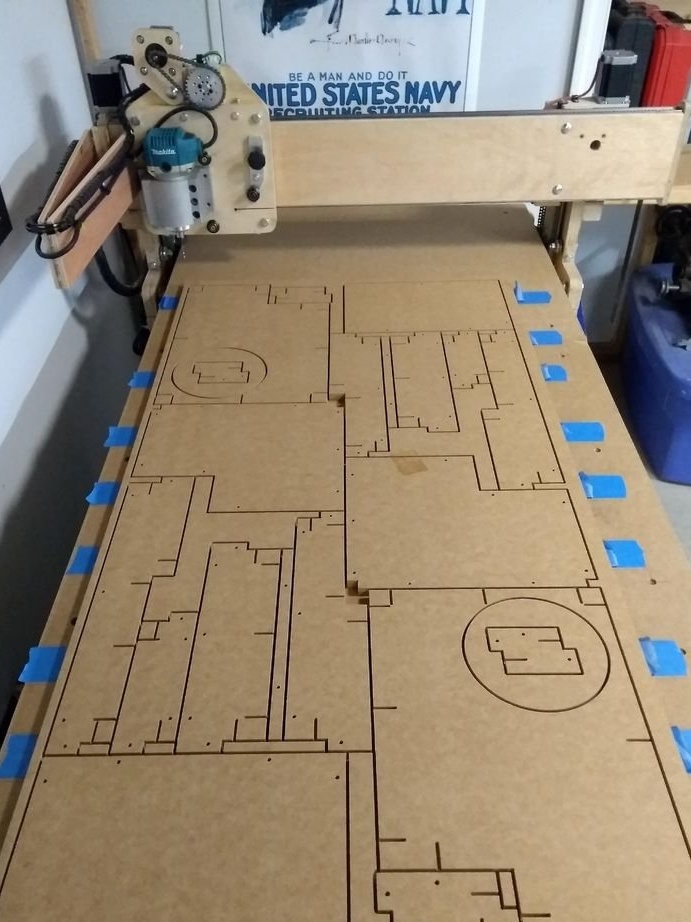
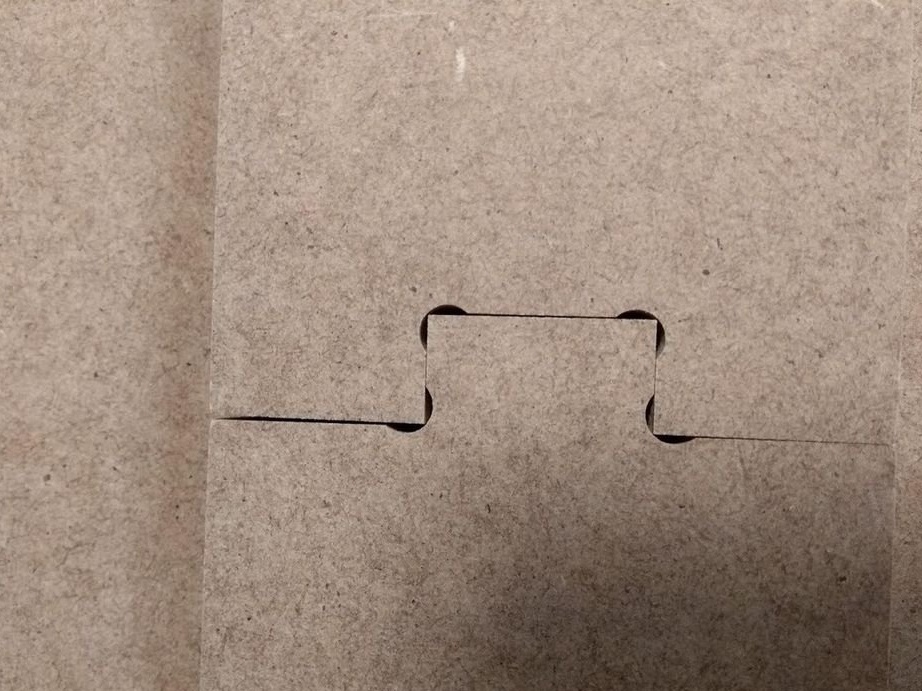
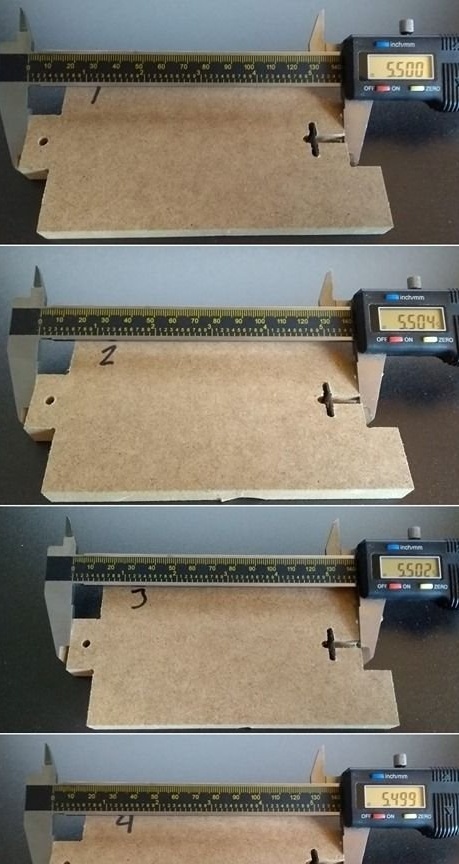
Anot meistro, mašina pasirodė gana normali, paskutinėje nuotraukoje pateikiami mašinos veikimo pavyzdžiai.