

Aš ir toliau modeliuoju ir kuriu robotus. Aš jau rašiau instrukcijas, kaip sukurti nuotolinio valdymo pultą modeliai ir robotai. Nuotolinio valdymo pultas yra pagrįstas senu kreiptuku „Sega“. Šis vairasvirtė turi keturias rodykles ir 8 mygtukus, kurių pakanka mašinai ar mažam robotui valdyti. Valdymas buvo vykdomas naudojant IR šviesos diodą. Šiandien parašysiu šio nuotolinio valdymo pulto modernizavimo instrukcijas, būtent jį paversti „Bluetooth“ nuotolinio valdymo pultu. Priklausomai nuo naudojamo „Bluetooth“ modulio, nuotolinio valdymo pultas arba prisijungs prie paties iš anksto užprogramuoto įrenginio, arba bus galima prisijungti prie nuotolinio valdymo pulto. Apibūdinsiu abu variantus. Mums reikės:
- Vairasvirtė iš „Sega“
- Arduino „Pro Mini“ 3.3v 8MHz
- USB-TTL
- 2 Ni-Mn akumuliatoriai 1,2v 1000mA
- „Bluetooth“ modulis HC-05 arba HC-06
- Raudonas šviesos diodas
- Mėlynas šviesos diodas
- Rezistorius 2x75Om, 2x5Om, 1x2Om
- Jungtis PLSx5 "motina"
- Karšti klijai
- laidai
- 4xAAA baterijų skyrius
- Daugiaspalviai laidai
- Lituoklis, lydmetalis, kanifolija
- tiesios rankos
1 veiksmas. „Bluetooth“ modulio pasirinkimas
Ryšiui palaikyti reikalingi du moduliai. Mes įterpsime vieną į nuotolinio valdymo pultą, o antrą mes prijungsime prie rašomosios mašinėlės arba robotas. Yra daugybė „Bluetooth“ modulių. Jie skiriasi funkcijomis ir palaikomais ryšio protokolais. Rastų modulių sąrašas:
- HC-03, HC-04 (HC-04-M, HC-04-S) ant lusto BC417143;
- HC-05, HC-06 (HC-06-M, HC-06-S) ant lusto BC417143;
- HC-05-D, HC-06-D;
- HC-07 - modulis su CSR 41C6 mikroschema;
- HC-08 - modulis su ypač mažomis energijos sąnaudomis ir „Bluetooth 4.0“ protokolu;
- HC-09 yra naujausias modulis, skirtas pakeisti HC-06 ir HC-07.
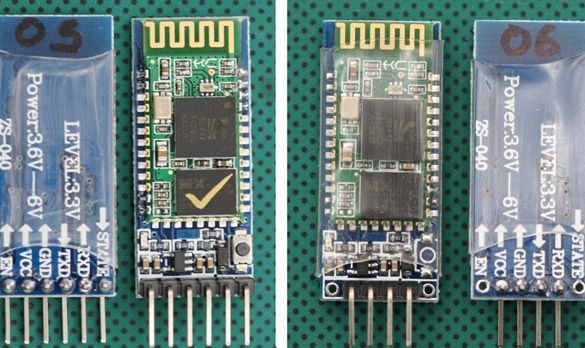
Aš įsitaisiau ant dviejų modulių HC-05 ir HC-06, nes jie yra optimalūs kainos / funkcionalumo atžvilgiu. Jie palaiko ryšio protokolą - „Bluetooth Specification v2.0 + EDR“. Diapazonas yra iki 10 metrų (2 galios lygis). Suderinamas su visais „Bluetooth“ adapteriais, palaikančiais SPP. „Flash“ atminties apimtis (programinės-aparatinės įrangos ir nustatymų saugojimui) yra 8 Mbit. Jie veikia radijo signalo dažniu - 2,40 .. 2,48 GHz. Pagrindinio kompiuterio sąsaja yra USB 1.1 / 2.0 arba UART. Jie sunaudoja mažai energijos - srovė ryšio metu yra 30–40 mA. Vidutinė dabartinė vertė yra apie 25 mA. Užmezgus ryšį, sunaudota srovė yra 8 mA. Šiuos modulius lengva rasti, jie yra labiausiai paplitę. Moduliai yra labai panašūs, tačiau pagrindinis skirtumas tarp jų yra tas, kad HC-05 gali veikti tiek pagrindiniu, tiek vergo režimais.HC-06 gali būti tik vergas. Paprasčiau tariant, HC-06 negali aptikti suporuoto įrenginio ir užmegzti su juo ryšio; jis gali tik paklusti šeimininkui. Moduliai parduodami kaip dvi kartu suklijuotos lentos. Mažesnis yra gamyklos modulis. Didelė - speciali lentynėlė pasidaryk pats. Tai atrodo kaip mažesnė lenta su BC417 lustu:

Taigi patys pasidaryk pats moduliai HC-05 ir HC-06:
Galite įsigyti modulį be lentos. Tai kainuoja šiek tiek pigiau, bet tada turėsite įdiegti 3,3 V įtampos reguliatorių moduliui. Be to, atstumas tarp kontaktų yra mažas ir jūs turėsite kankintis patys, litaudami prie vielos modulio.
Norėdami užmegzti ryšį tarp nuotolinio valdymo pulto ir roboto ar mašinos, turite sukonfigūruoti du „Bluetooth“ modulius vienas ant kito. Tokiu atveju mes sukonfigūruosime HC-05 modulį taip, kad jis rastų ir prisijungtų prie HC-06.
2 veiksmas Konfigūruokite HC-06.
Pirmiausia turite prijungti HC-06 prie kompiuterio. Tai galima padaryti prijungus modulį per USB-UART adapterį. Šiuo atveju ryšys yra toks:
„Bluetooth“ - USB-UART
TX - RX
RX - TX
VCC - +5
GND - GND
Jei neturite po ranka USB-UART, galite parašyti šį eskizą bet kurioje „Arduino“ plokštėje:
Prijunkite taip:
„Bluetooth“ - „Arduino“
TX - 2 kaištis
RX - 3 kaištis
VCC - +5
GND - GND
Tada atidarome bet kurią terminalo programą, pasirenkame jungtį, prie kurios prijungtas HC-06, numatytasis greitis yra 9600, NL ir CR nereikia. Jei „Bluetooth“ ryšys su HC-06 neužmegztas, modulis veikia įvedant AT komandas. Jei modulis nereaguoja, pabandykite jį perkrauti, atjungdami teigiamą laidą ir vėl prijungdami. Ir įveskite šias komandas:
„AT“ - be kabučių turėtų būti atsakymas „Gerai“.
„AT + ADDR“ - pasinaudodami šia komanda sužinosime unikalų HC-06 adresą, užrašykite šį adresą
„AT + BAUD7“ - nustatykite greitį 57600
„AT + RESET“ - perkraukite modulį
Šios komandos nereikia įvesti, bet tik tuo atveju geriau jas žinoti:
„AT + NAME
„AT + ORGL“ - modulio gamyklinių nustatymų atkūrimas
Tai užbaigia HC-06 sąranką.
3 veiksmas Konfigūruokite HC-05.
Mes prijungiame modulį panašiai kaip HC-06. Tada atidarykite bet kurią terminalo programą, pasirinkite komortą, kuriame kabo USB-UART arba „Arduino“, gamyklinis numatytasis ryšio greitis yra 9600, bet aš taip pat sutikau 38400 greičiu. Jei nepakeitėte jo, pasirinkite 9600, negalite prisijungti ir pakeisti jo į 38400. Taip pat Verta įtraukti parametrus NL ir CR. Norėdami perkelti AT komandos įvesties režimą, turite paspausti mygtuką ant HC-05 plokštės, tada įveskite:
„AT“ - įvestas be kabučių, turėtų būti atsakymas „Gerai“. Jei atvyksite, mes toliau įvesime komandas toliau.
„AT + ROLE = 1“ - šia komanda mes nustatome modulio vaidmenį su skaitmeniu:
0 - vergas, 1 - pagrindinis, 2 - vergas cikle *. Turėtumėte gauti atsakymą „+ VAIDMUO: 1 \ r \ n“ arba „Gerai“
„AT + CMODE = 0“ - kapitono vaidmens modulis yra prijungtas tik prie to „Bluetooth“ įrenginio, kurio adresą nurodo komanda „AT + BIND“.
„AT + BIND: 1234,56,123456“ - norėdami užmegzti ryšį su savo HC-06, čia turite įvesti jo adresą. Įvedęs visas komandas, modulis yra pagrindinio vaidmens (ROLE = 1) ir nustatytas ryšio režimas fiksuotu adresu (CMODE = 0), jis prisijungs tik prie „Bluetooth“ įrenginio, kurio adresą nurodo ši komanda. Dalys adreso įrašomos: diegiant - atskiriant kableliu, o kai atsakoma - per dvitaškį. Gausite atsakymą: „+ BIND: 1234: 56: 789ABC \ r \ n“ arba „OK“
„AT + UART = 57600,0,0“ - nustatykite greitį iki 57600 bps, sustojimo bitą žymi skaičius: 0 - vienas, patikrinimas žymimas skaičiumi: 0 - be patvirtinimo
Jei painiojate dėl modulio nustatymų arba jis nustoja veikti tinkamai, išbandykite šią komandą:
„AT + ORGL“ - modulis atkuria šiuos nustatymus: CLASS = 0, IAC = 9e8b33, ROLE = 0, CMODE = 0, UART = 38400,0,0, PSWD = 1234, NAME = hc01.com.
Ir tada iš naujo sukonfigūruokite jums reikalingus parametrus.
Tokiu būdu mes sukūrėme tvirtą ryšį tarp HC-05 ir HC-06. Kai HC-05 moduliai yra įjungti, jis užmezga ryšį su HC-06. Iš asmeninės patirties galiu pasakyti, kad geriau pirmiausia įjungti HC-05, o paskui HC-06. Jei ryšys nutrūksta, turite perkrauti abu modulius.
4 veiksmas Nuotolinio valdymo pulto paruošimas.
Šis žingsnis išsamiai aprašytas ankstesnėse instrukcijose, pateiktose:
https://ltm.imdmyself.com/8626-ik-pult-iz-dzhoystika-ot-sega.html
Būtina atlikti 1-4 veiksmus. Ledų litavimas yra neprivalomas, nors jis netrukdys.
5 žingsnis „Bluetooth“ modulio prijungimas.
Aš patariu jums įdiegti HC-06 nuotolinio valdymo pulte. Kadangi norint pakeisti modulio parametrus, reikia tik užpildyti atitinkamą „Arduino Pro Mini“ eskizą. „HC-05“ atveju turėsite išardyti nuotolinio valdymo pultą, norėdami paspausti mygtuką, kad perjungtumėte į AT komandų režimą.Mes sujungiame viską pagal šią schemą
Vairasvirtė - Arduino
Rodyklė aukštyn - 2 kaištis
Rodyklė žemyn - 4 kaištis
Kairė rodyklė - 5 kaištis
Dešinė rodyklė - 6 kaištis
Mygtukas A - 8 kaištis
B mygtukas - 10 kaištis
C mygtukas - 7 kaištis
X mygtukas - 12 kaištis
Y mygtukas - 11 kaištis
Z mygtukas - 9 kaištis
Pradėjimo mygtukas - 14 kaištis (A0)
„Reset“ mygtukas - RST
Bendra - GND
„Bluetooth“ - „Arduino“
TX - 16 kaištis (A2)
RX - kaištis 17 (A3)
VCC - + 5
GND - GND
HC-05 mes prisijungiame prie jūsų rašomosios mašinėlės ar roboto, kurį jūs valdysite. Ryšio parinktis ir eskizus galite rasti kitose mano instrukcijose. Rašydami roboto eskizą, turite nustatyti 57600 ryšio greitį, o eskize naudoti „SoftwareSerial“ biblioteką.
6 veiksmas Aplinkos ir programinės įrangos paruošimas.
Geriausias būdas rašyti ir redaguoti eskizą yra naudoti „Arduino IDE“. „Arduino IDE“ versija turi būti ne žemesnė nei 1,8. Atsisiųskite „Arduino IDE“ iš oficialios svetainės:
https://www.arduino.cc/en/Main/Software
Tada turite pridėti biblioteką prie „Arduino IDE“. Eskize naudojama viena „SoftwareSerial.h“ biblioteka (ryšiui su „Bluetooth“ moduliu):
Turėsite ją atsisiųsti ir įdiegti. Įdiegti biblioteką galite išpakavę archyvą ir perkėlę neišpakuotus failus į aplanką „bibliotekos“, esantį aplanke, kuriame įdiegta „Arduino IDE“. Arba galite naudoti įmontuotą įrankį bibliotekoms pridėti - neišpakuodami atsisiųsto archyvo, „Arduino IDE“ pasirinkite meniu Eskizas - Prijunkite biblioteką. Išskleidžiamojo sąrašo viršuje pasirinkite elementą „Pridėti .Zip biblioteką“. Ir nurodykite atsisiųsto archyvo vietą. Įdiegę biblioteką, turite iš naujo paleisti „Arduino IDE“.
Mūsų nuotolinio valdymo pultas mirksi taip pat, kaip ir ankstesnė nuotolinio valdymo pulto versija, prijungta per USB-TTL per jungtį, įkrovimas vyksta ir per jį. Užpildydami eskizą, spustelėkite Reset.
