
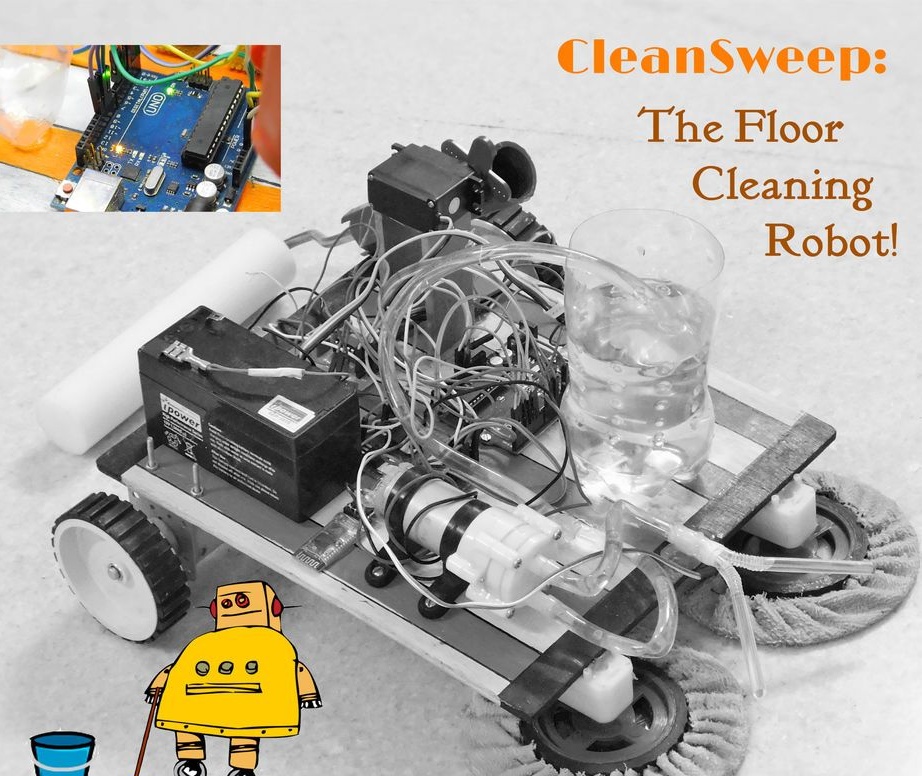
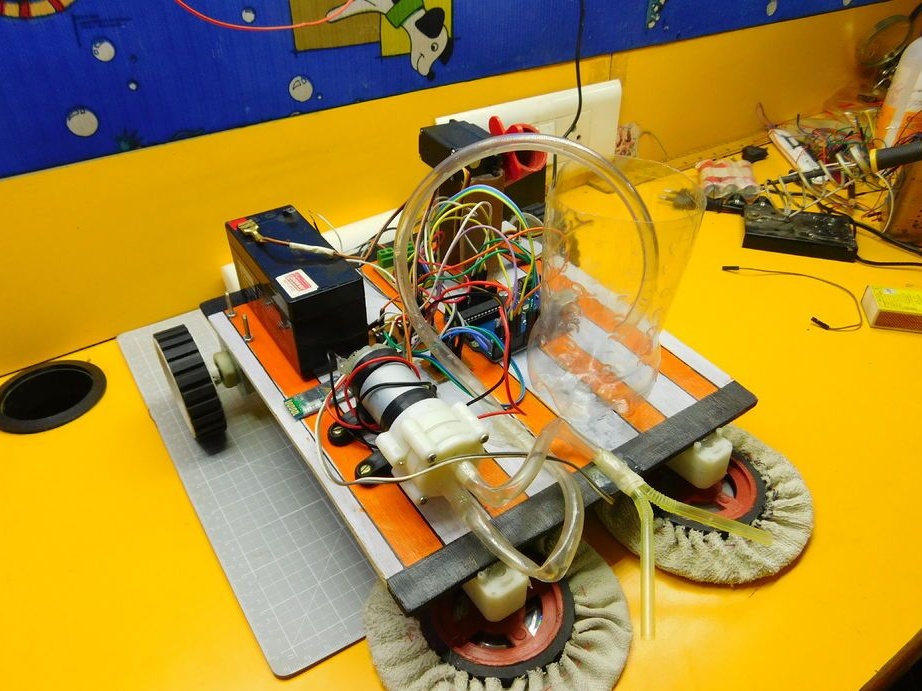


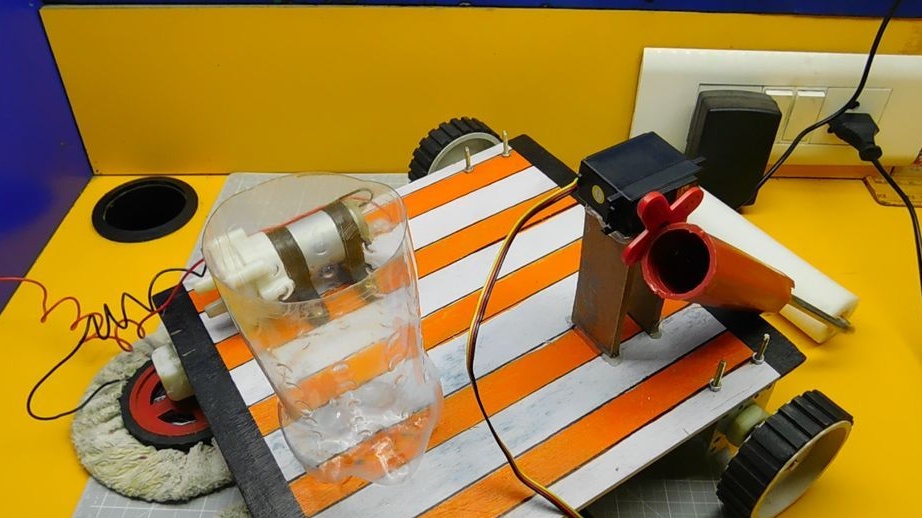
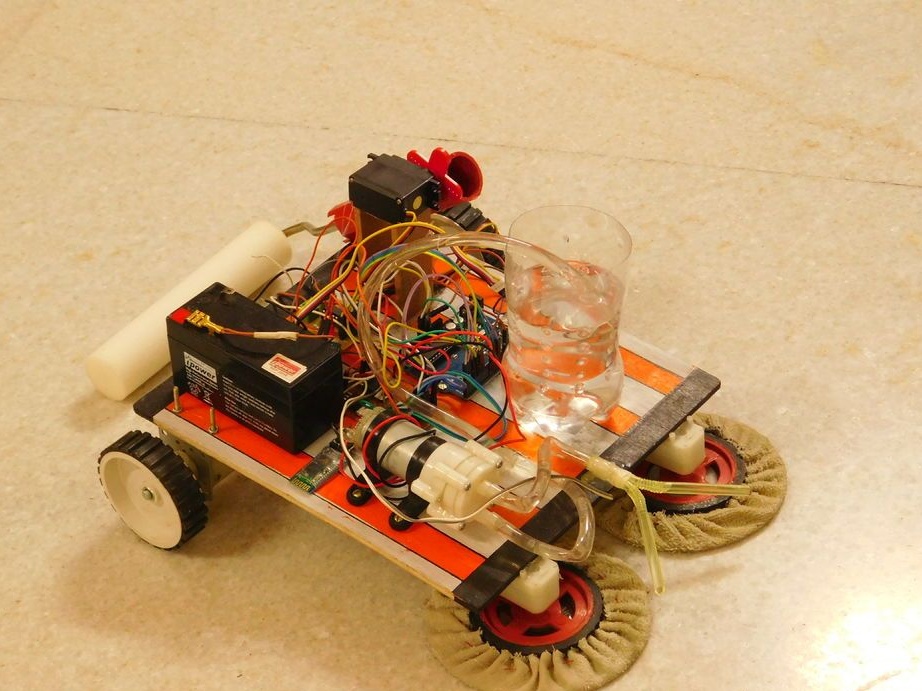
RobotasKombaino arsenale yra du besisukantys šepečiai, pritvirtinti reduktoriaus veleno priekyje. Pavarų dėžė sukasi 75 aps / min greičiu. Roboto laive yra vandens bakas. Roboto gale pritvirtintas volelis. Robotas sumaišomas ratų pagalba, pritvirtintais ant reduktoriaus ašies. Valiklis valdomas išmaniuoju telefonu per „Bluetooth“. Ateityje meistras planuoja padaryti robotą visiškai autonomišką. Pažiūrėkime, kaip šis įrenginys veikia.
Įrankiai ir medžiagos:
-Motorinė pavara 100 aps / min -2 vnt;
-Variklio ratai -2 vnt;
-Motorinis reduktorius su ratu 75 aps / min - 2 vnt;
-Arduino UNO;
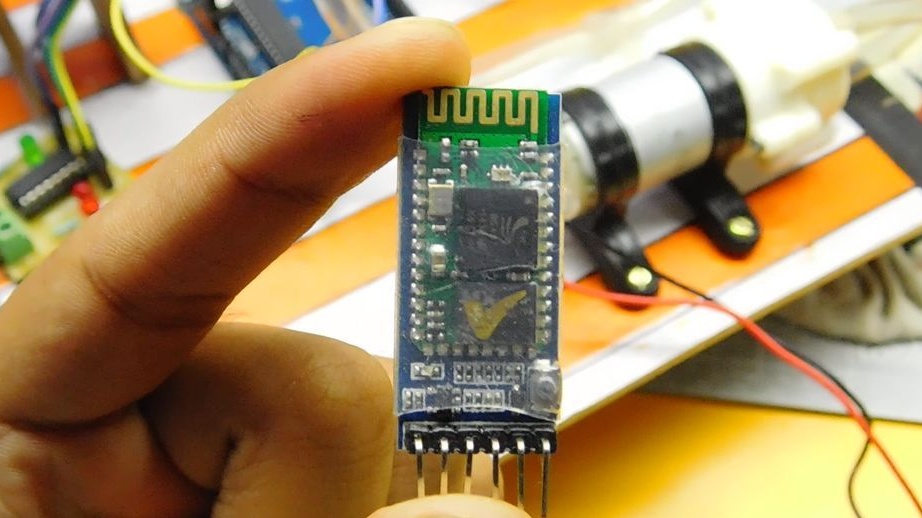
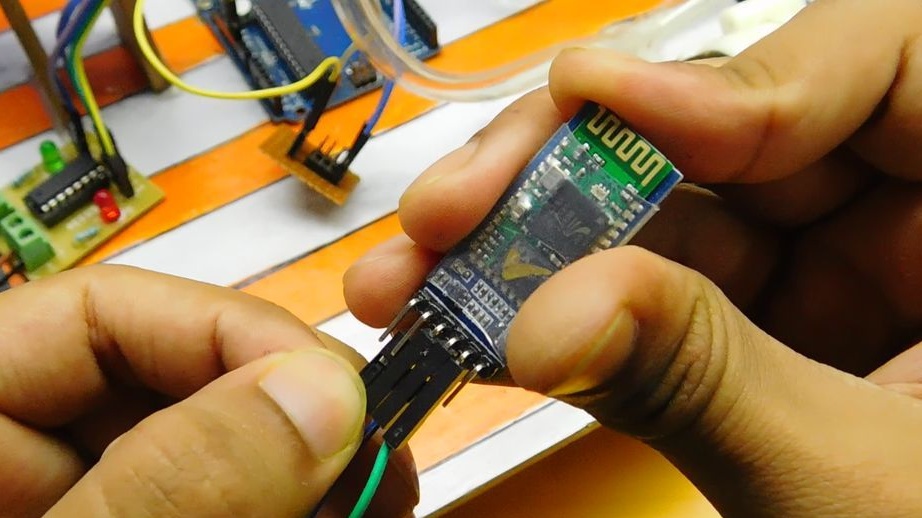
- „Bluetooth“ modulis HC-05/06;
-Driver L293D;
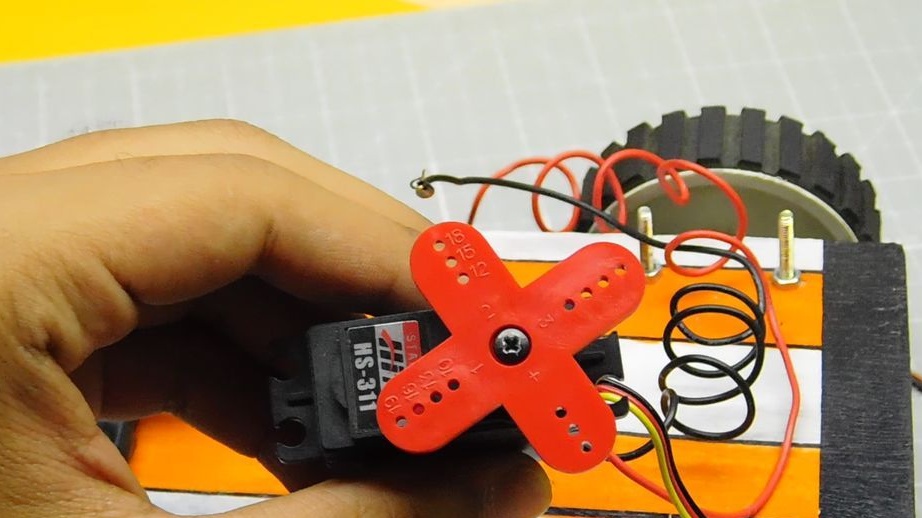
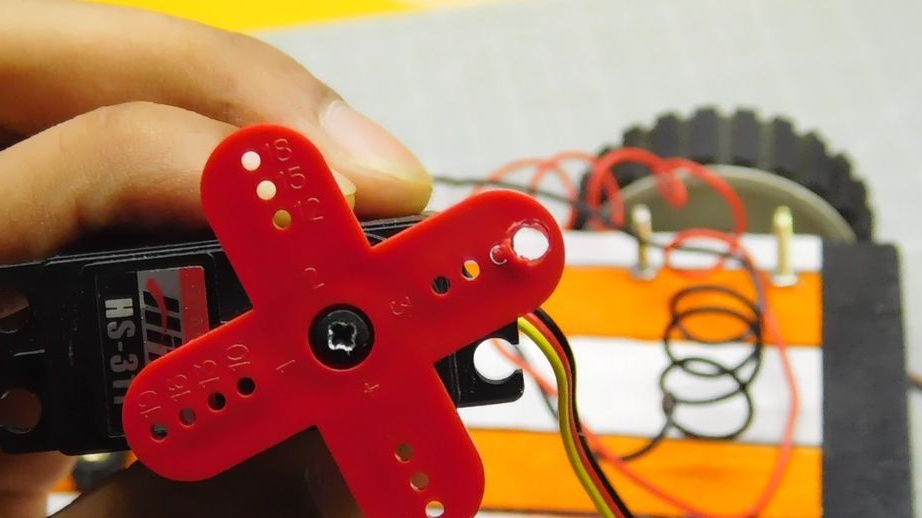
- servovariklis (180 laipsnių pasukimas);
-12 V baterija;
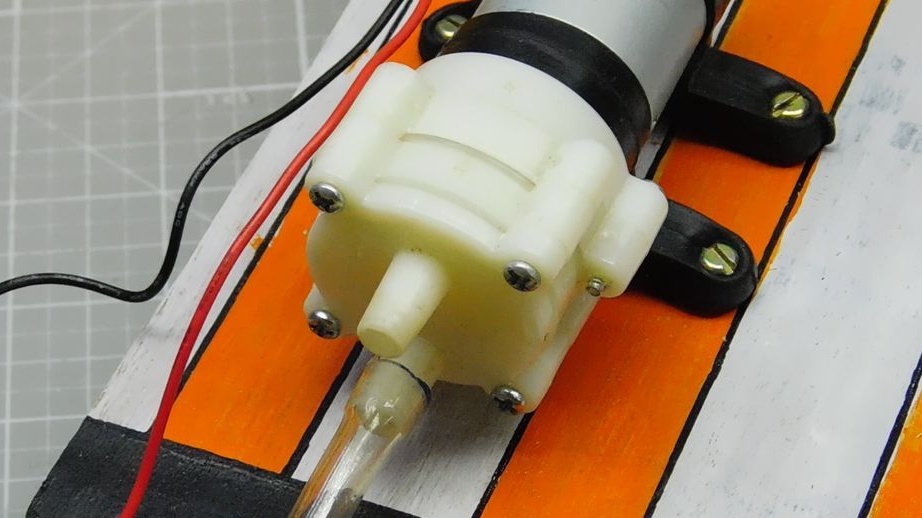
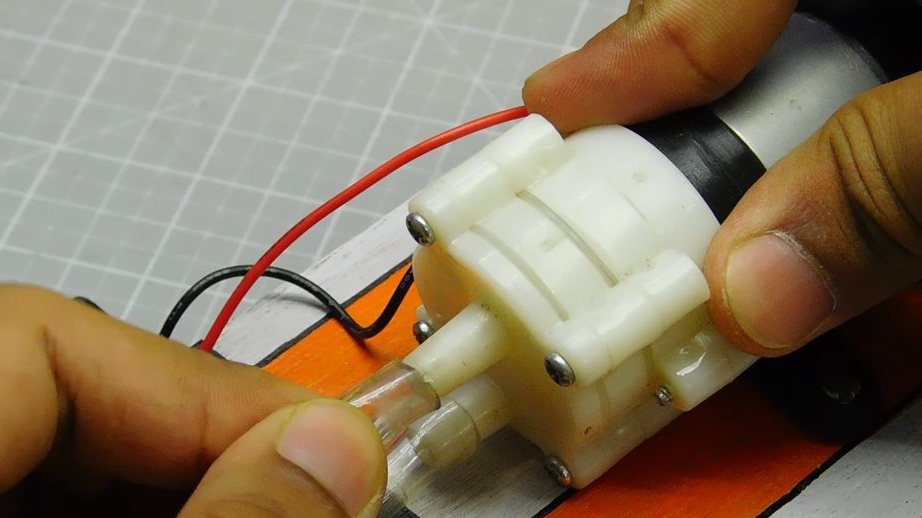
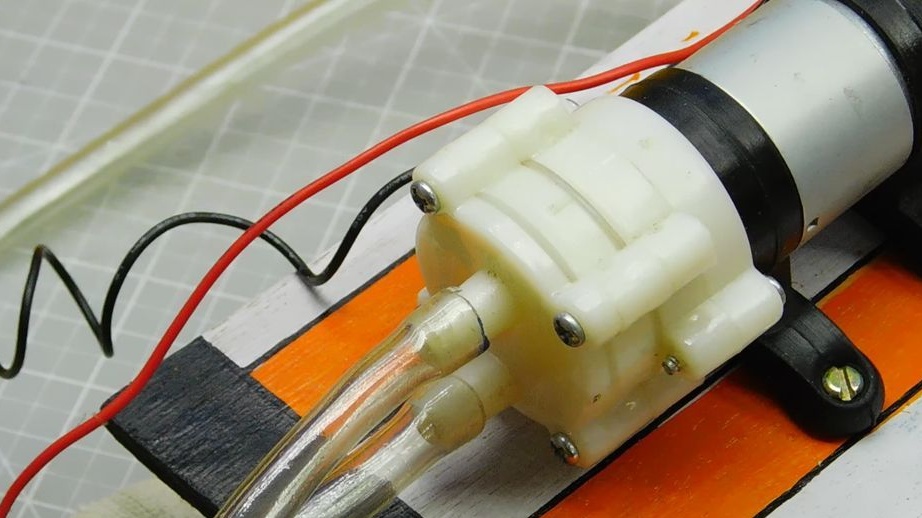
- Siurblys 12 V;
Tranzistorius TIP31C;
Tranzistorius TIP122;
- kompaktinis diskas - 2 vnt .;
- dažų volelis;
- Audinių servetėlės;
- adata su sriegiu;
-Tube;
-Vyras;
- Džemperiai;
- montavimo lenta;
-Tvirtinimo detalės;
-Fanera;
-Plastikinis butelis;
-Lituoklis;
-Klimo pistoletas;
-Gręžimas;
- Replės;
-Dremel;
- teptukas;
-Piešimas;
-Markeris;
- žirklės;











Pirmas žingsnis: Fondas
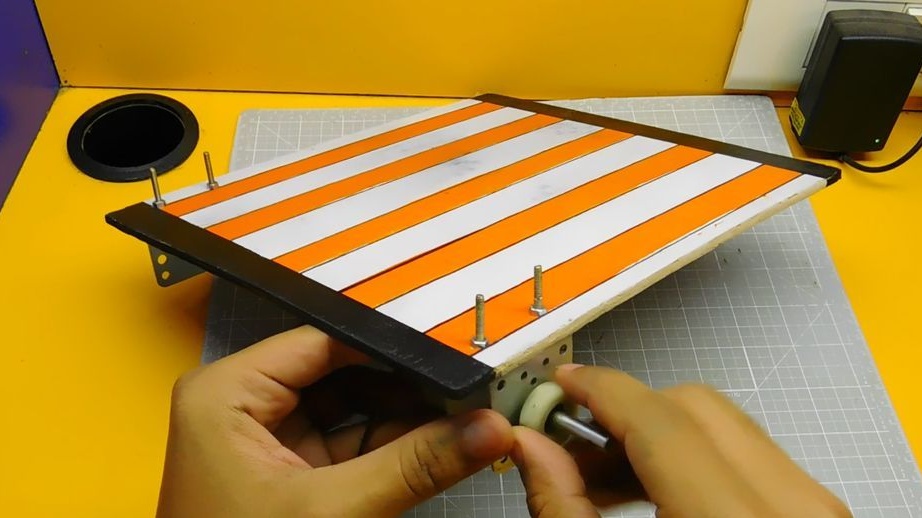
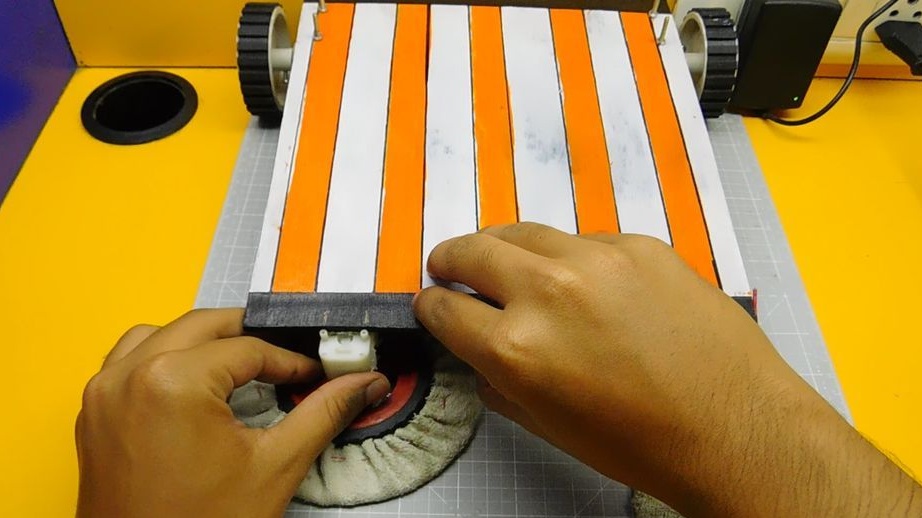
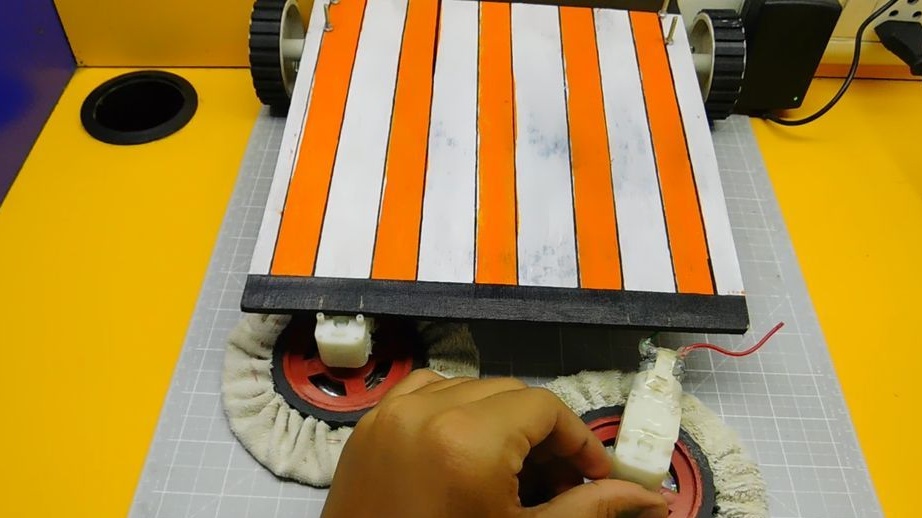
Iš faneros pjauna pagrindą. Pagrindo dydis yra 30 * 22 cm, dažo pagrindą. Viena vertus, jis pritvirtina reduktorių. Bendrai pritvirtina reduktoriaus variklį kitoje pagrindo pusėje.



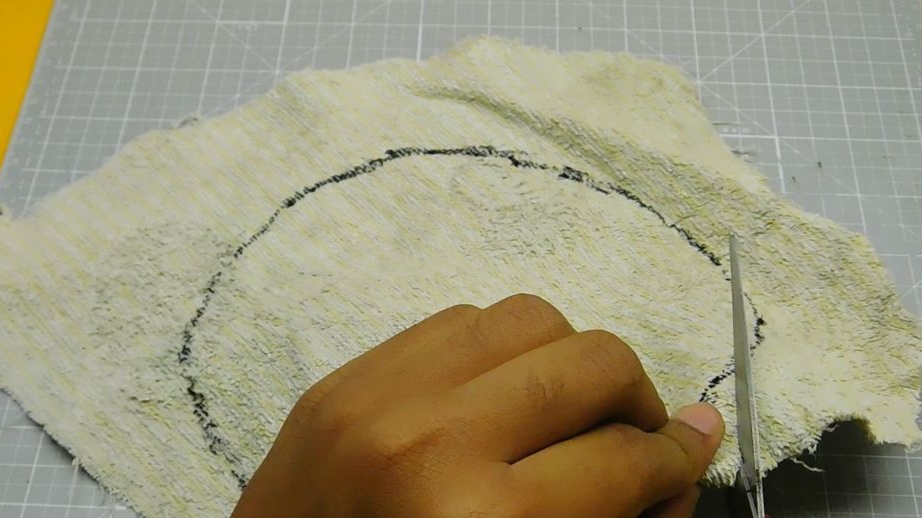
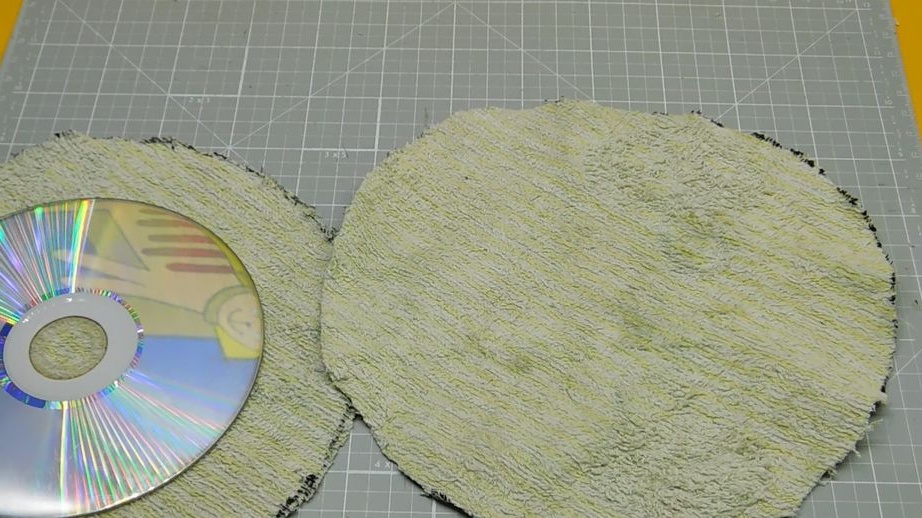
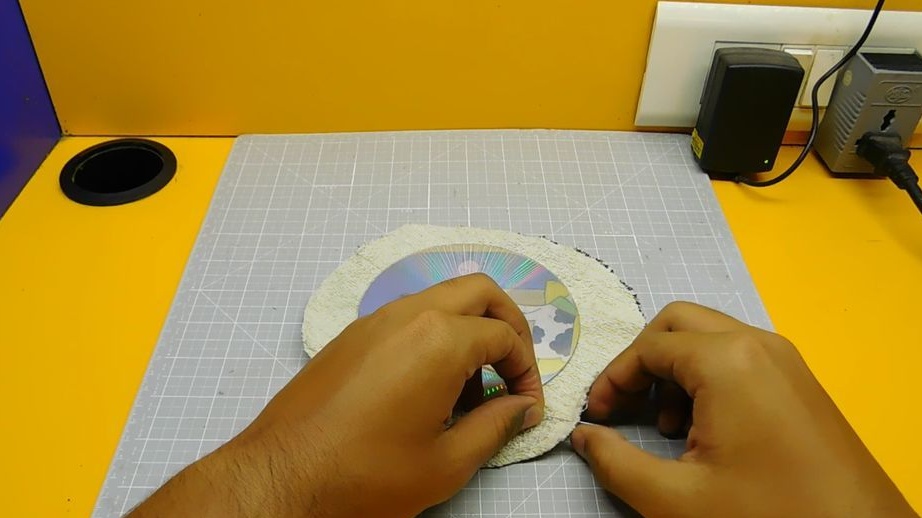
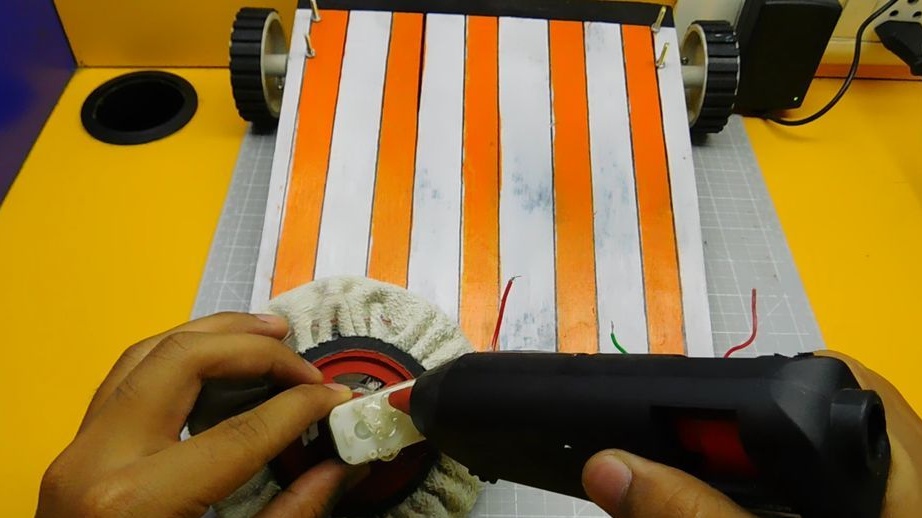
Antras žingsnis: Šepečiai
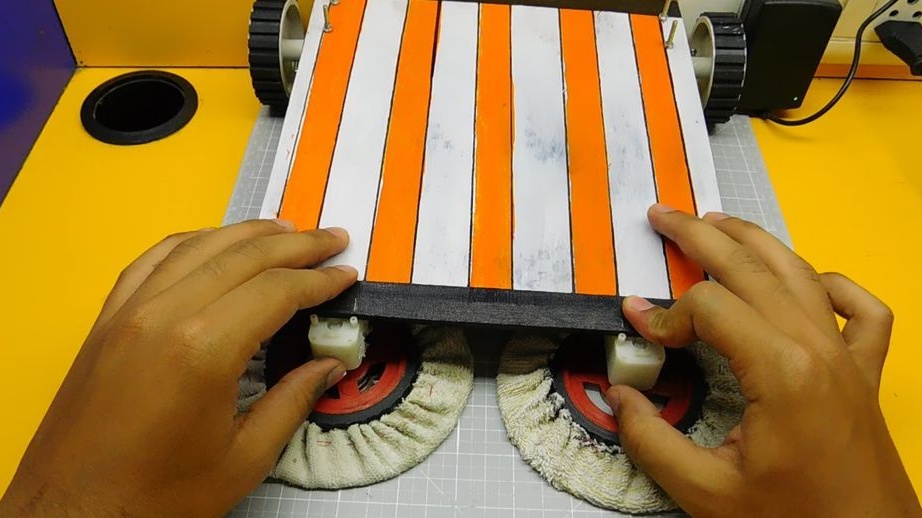
Meistras gamino teptukus iš senų kompaktinių diskų. Iškirpkite skudurą. Užsegamas jos vairuoti. Pakartotinis veiksmas su kitu disku. Diskai pritvirtinti karšto lydalo klijais ant reduktoriaus variklio rato. Abu platformos varikliai pritvirtinti priešais platformą.








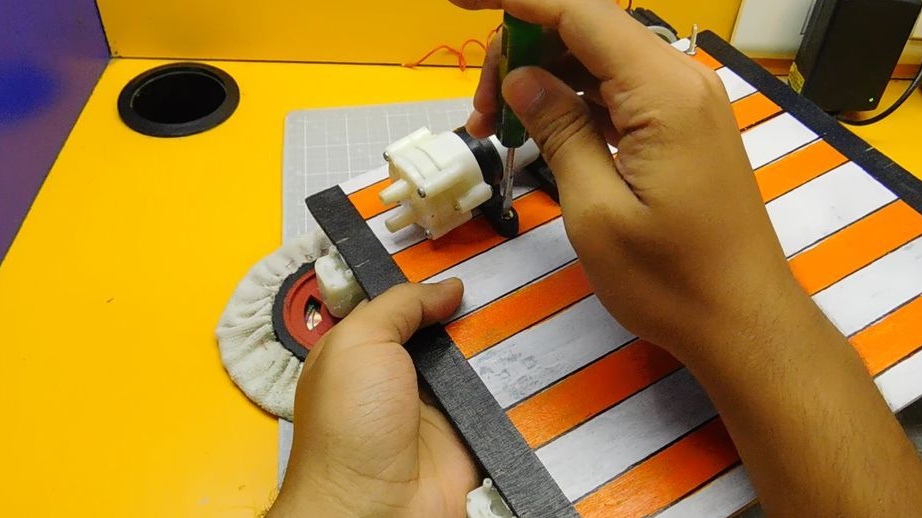
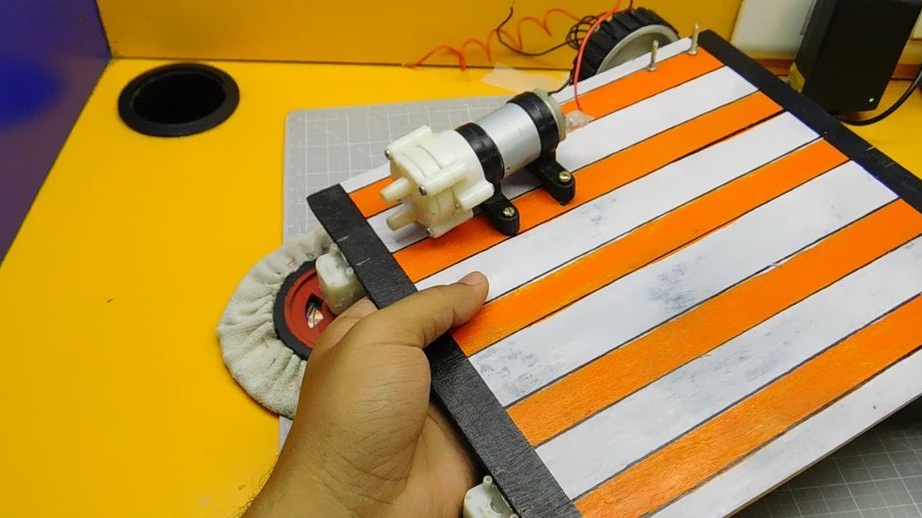
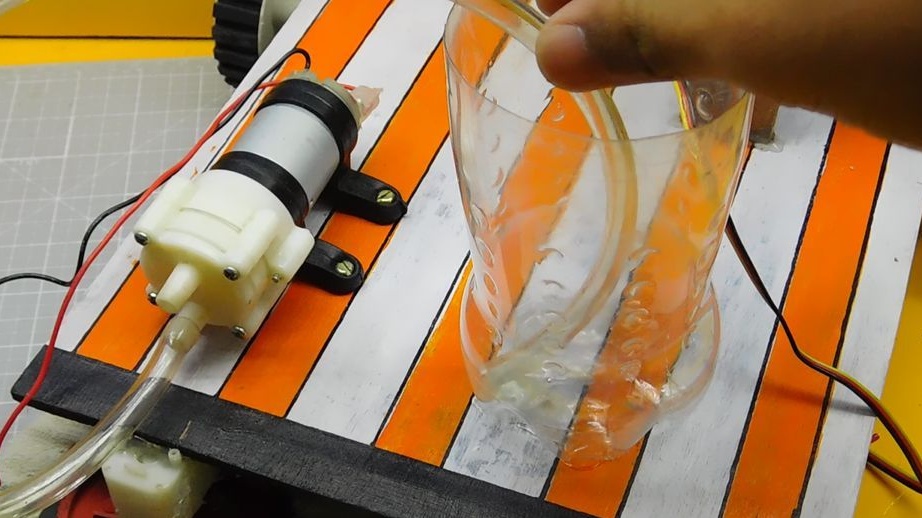
Antras žingsnis: vandens tiekimas
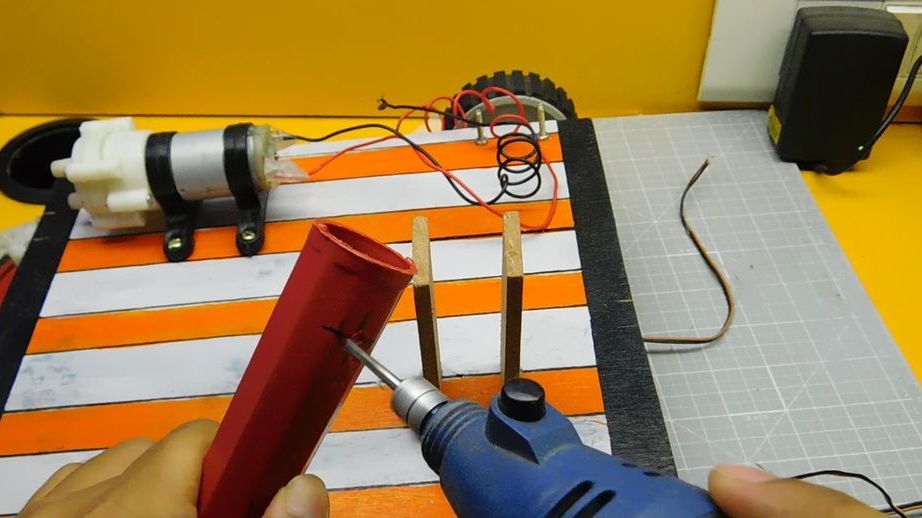
Pritvirtina siurblį prie platformos. Nupjauna plastikinio butelio viršutinę dalį. Pritvirtina butelį prie platformos. Sumontuoja vandens įsiurbimo vamzdį. Vėliau bus pritvirtintas vandens tiekimo vamzdis prie šepečių.








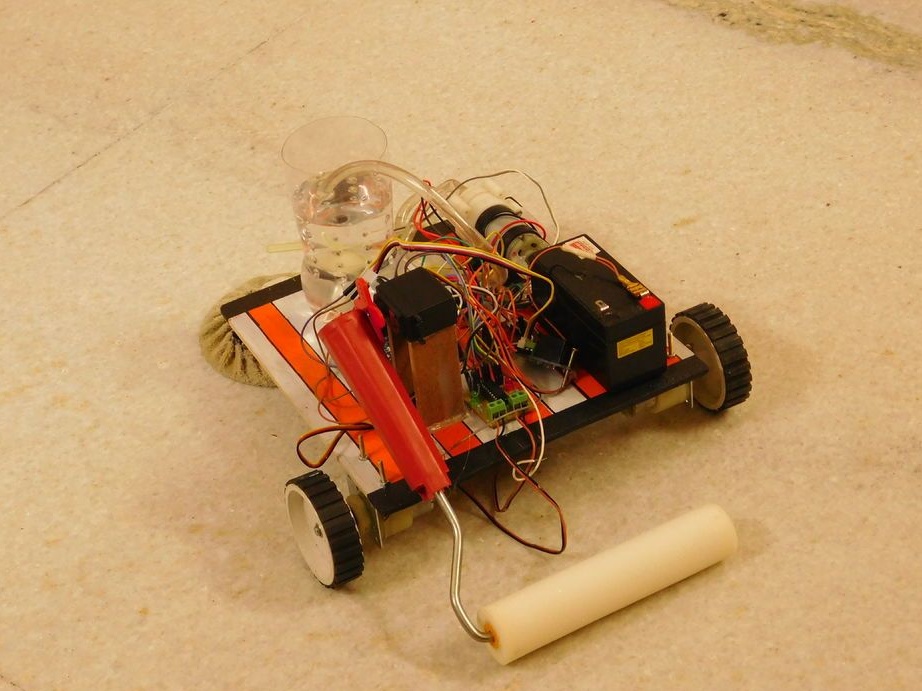
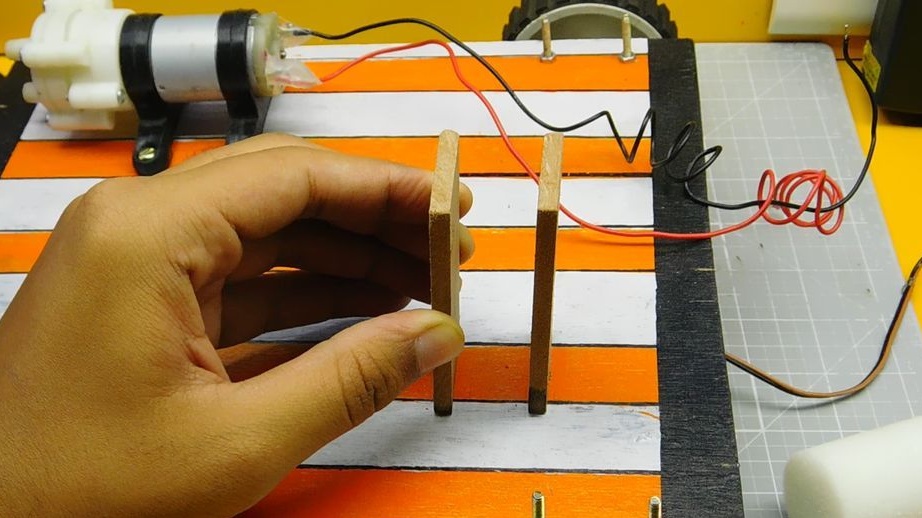
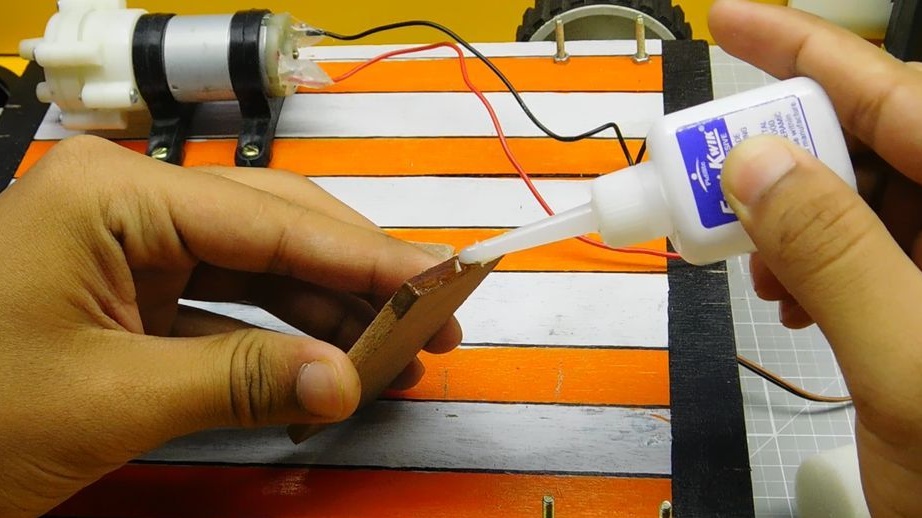
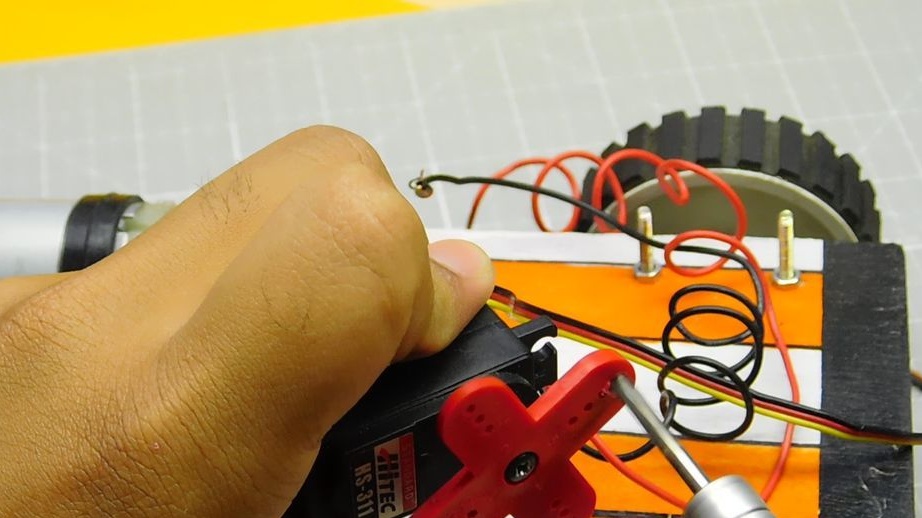
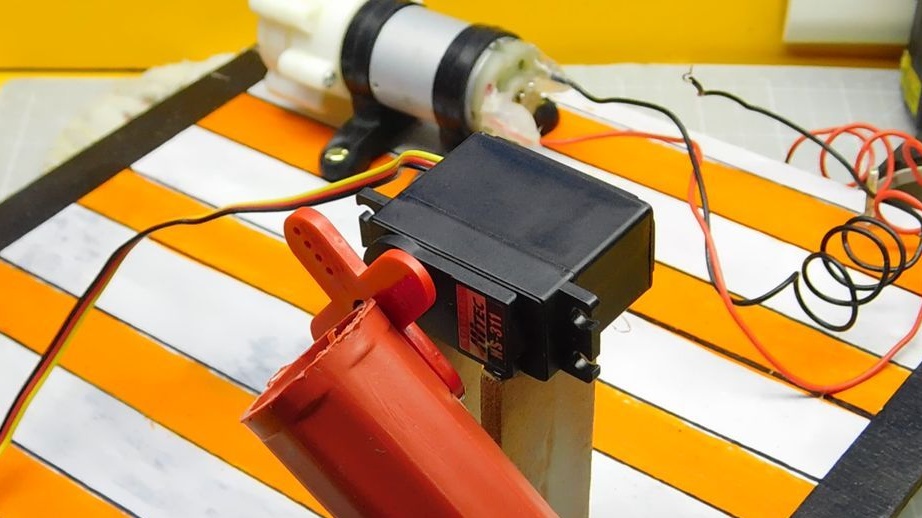
Trečias žingsnis: ritininio kėlimo mechanizmas
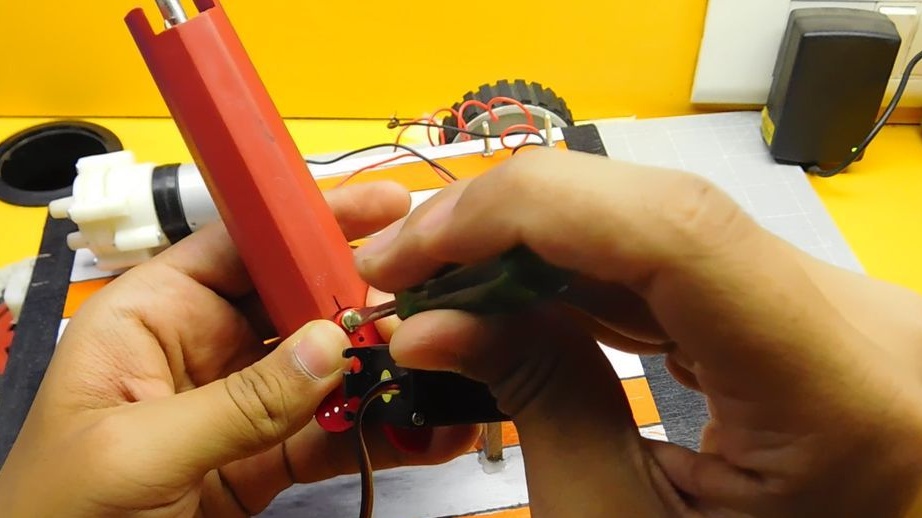
Volelio užduotis yra surinkti smulkias dulkes. Kadangi retkarčiais reikia volelio, meistras nusprendė sukurti mechanizmą, kuris padėtų ritinėlį pakelti ir nuleisti. Pritvirtina du platformos skersinius lygiagrečiai vienas kitam. Padaro dvi skylutes, vieną servo svirtyje, antrą ritinėlio rankenoje. Prisukite ritinėlio rankeną prie svirties. Užtikrina servo juostą.


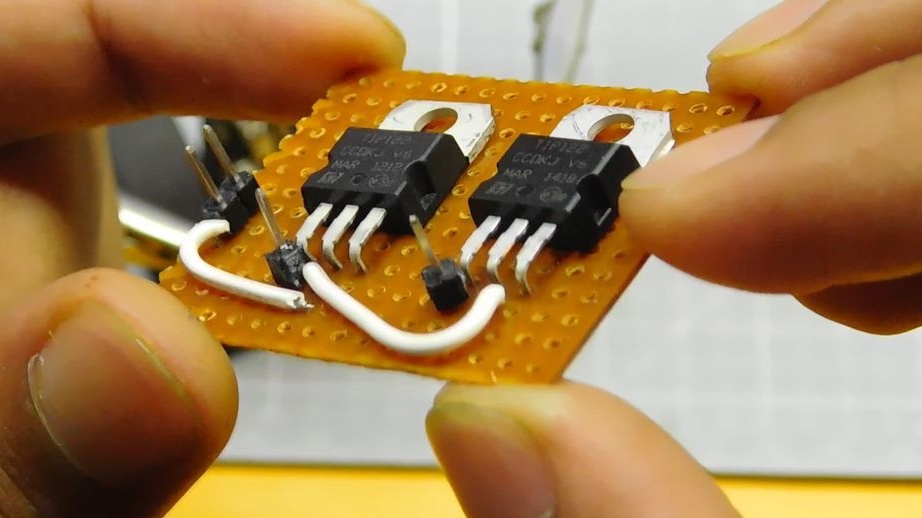
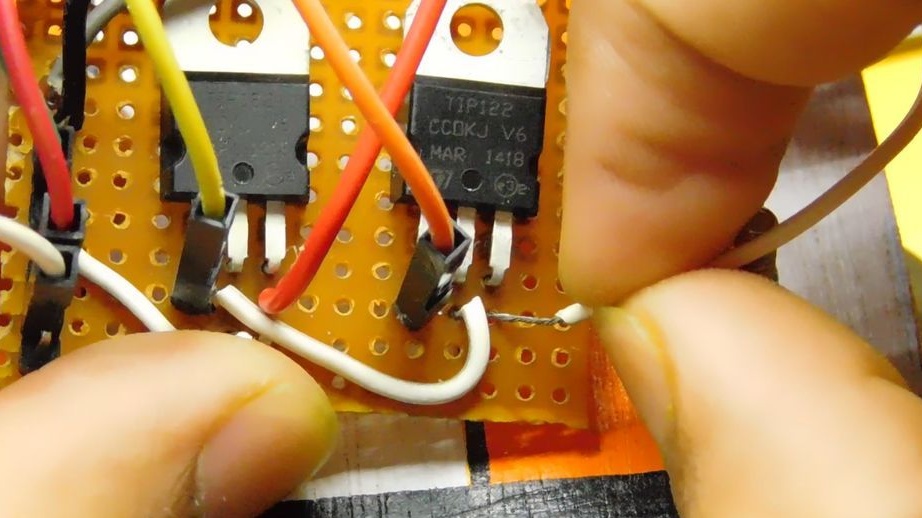
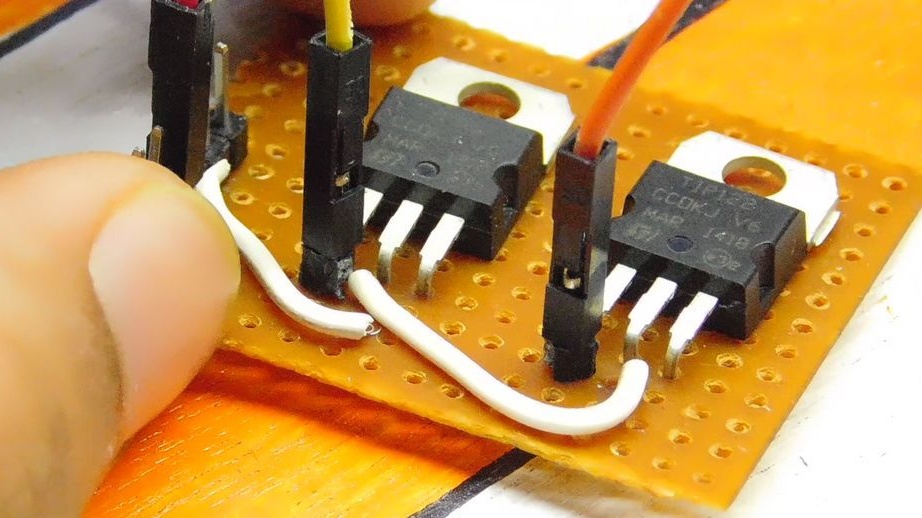
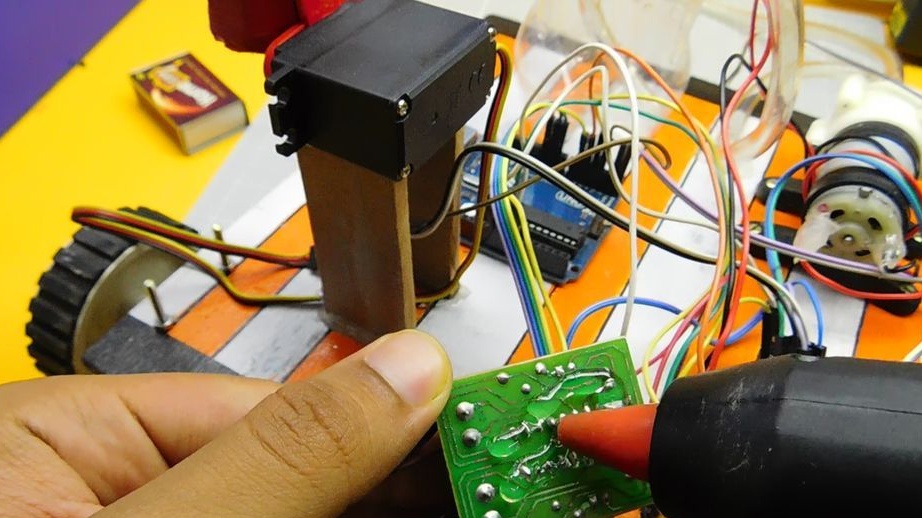
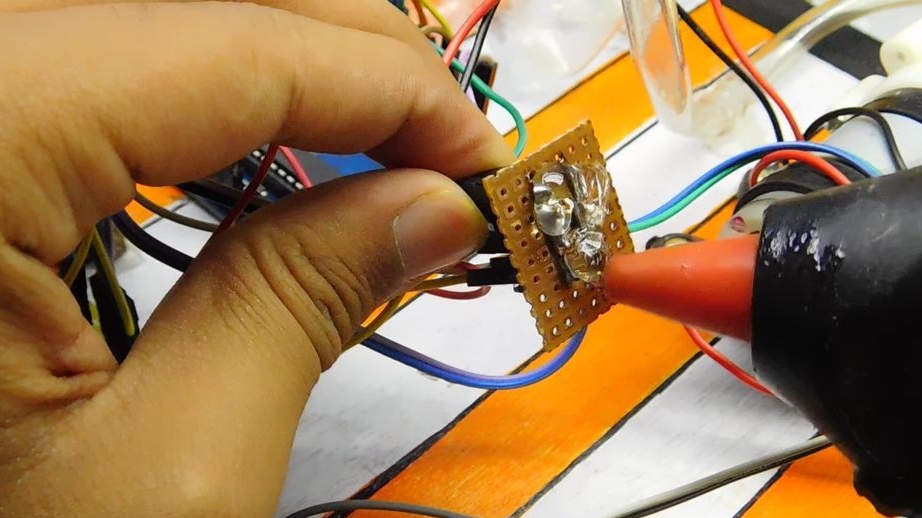
Ketvirtas žingsnis: tranzistorius
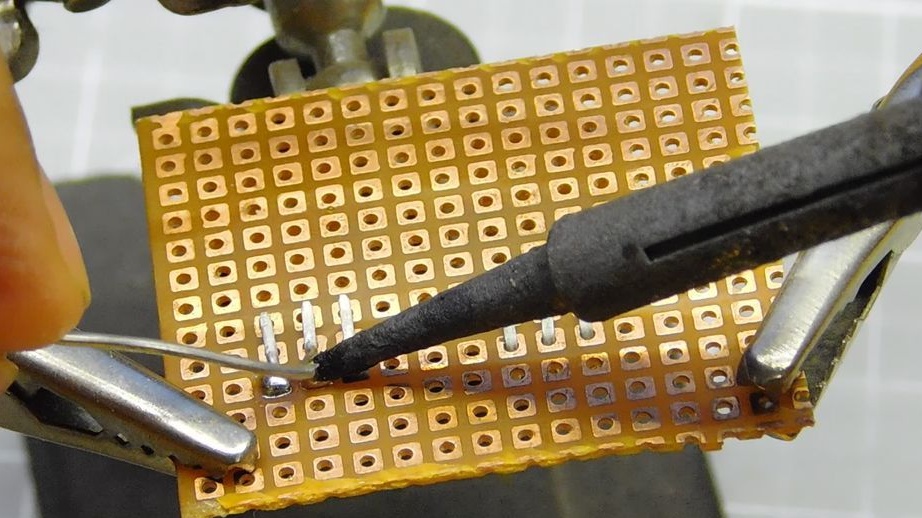
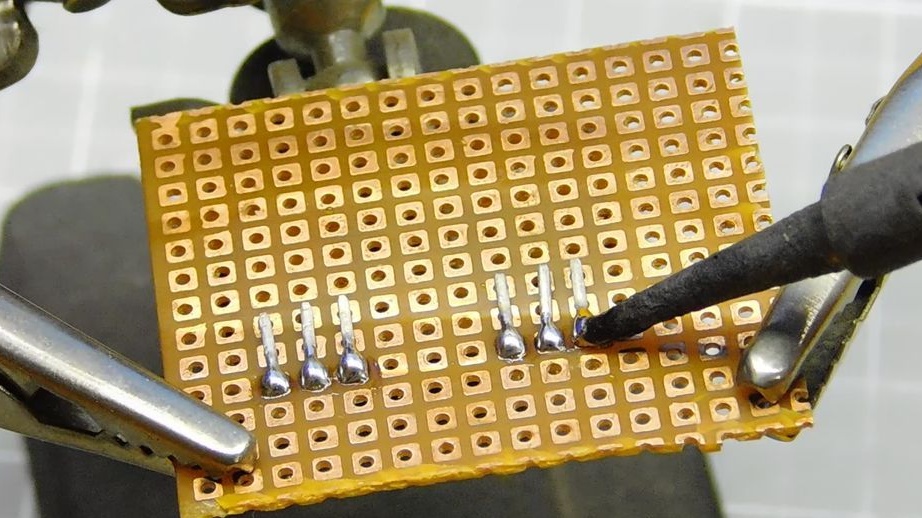
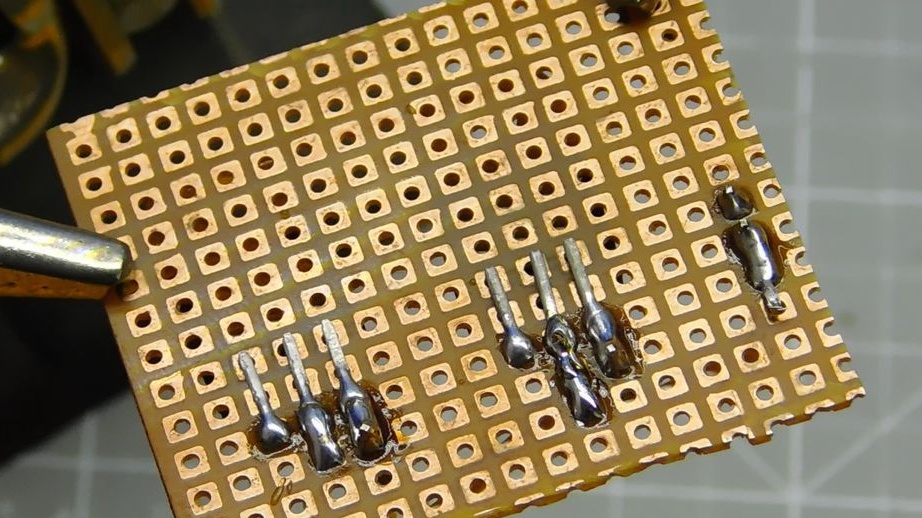
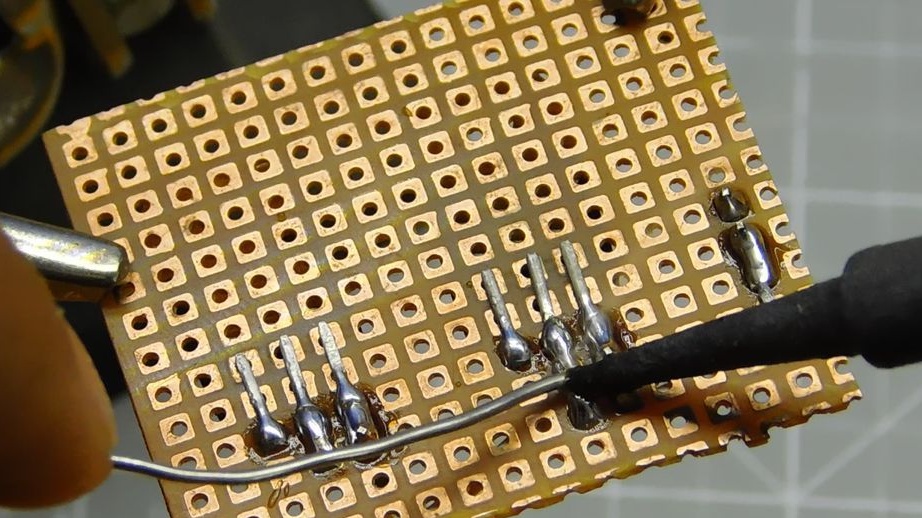
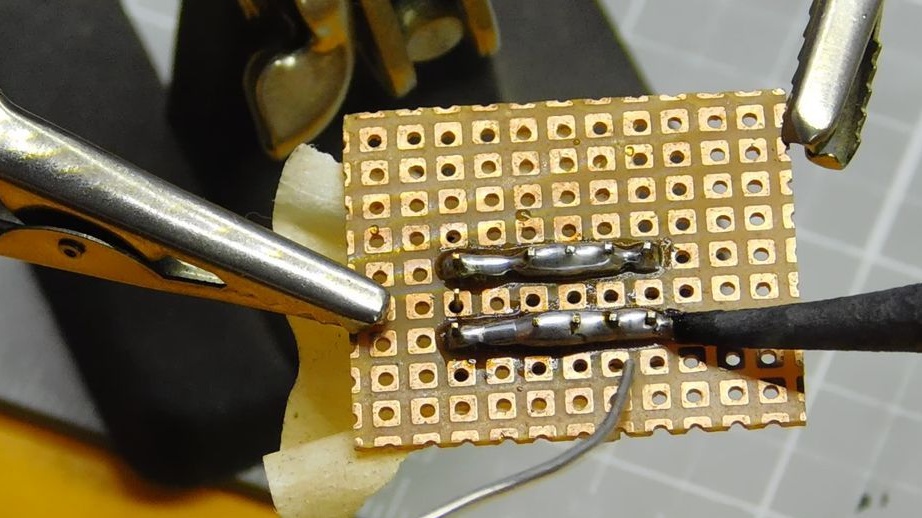
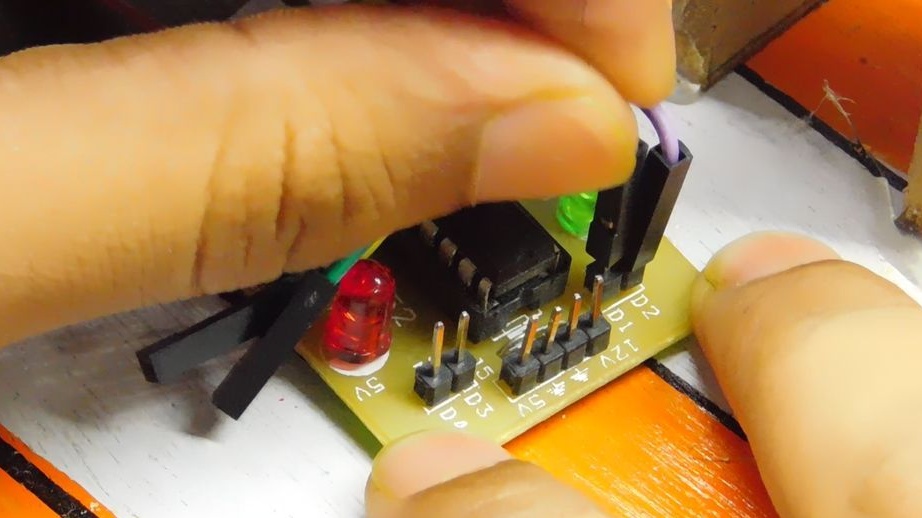
Vandens siurbliui ir varikliams reikia 12 V galios, tačiau, kadangi „Arduino“ skleidžia tik 5 V, kapitonas surenka grandinę ant tranzistoriaus TIP122.Taip pat vedlys prideda kelis + 5 V ir „Gnd“ kaiščius prie plokštės.
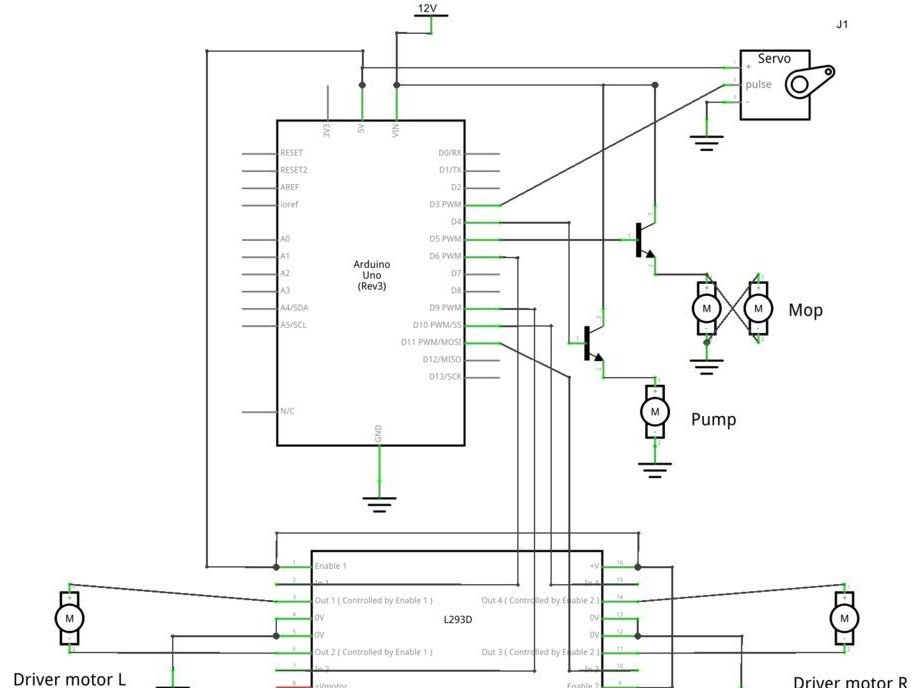
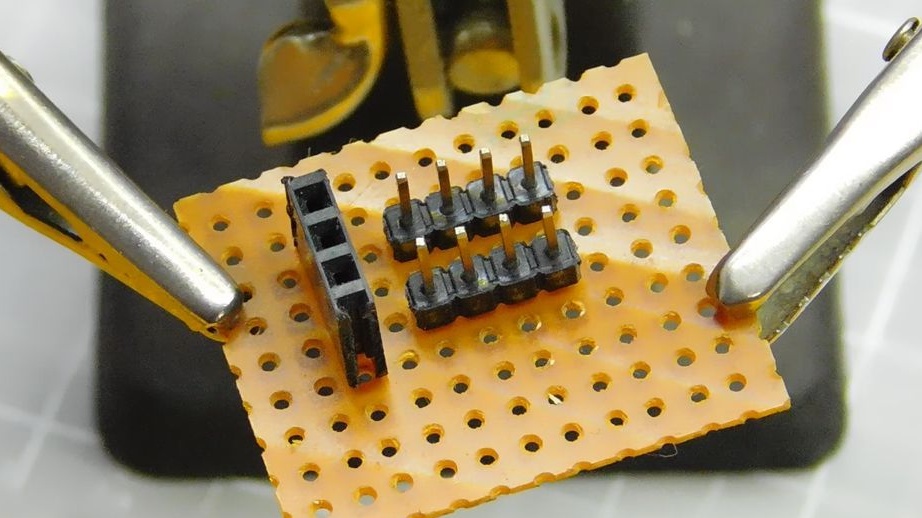
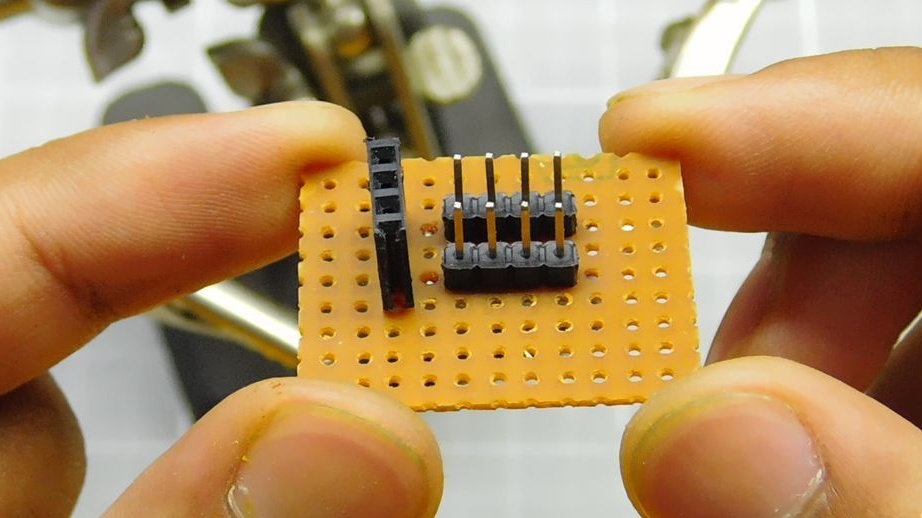
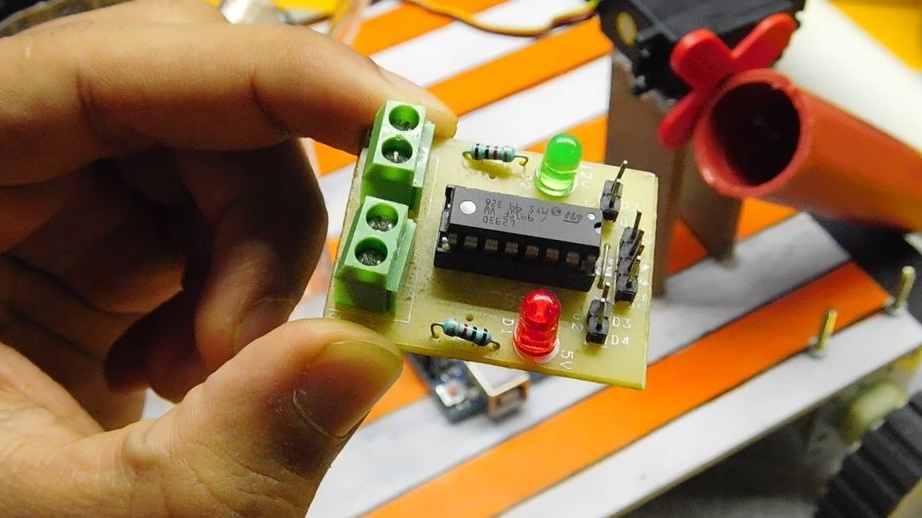
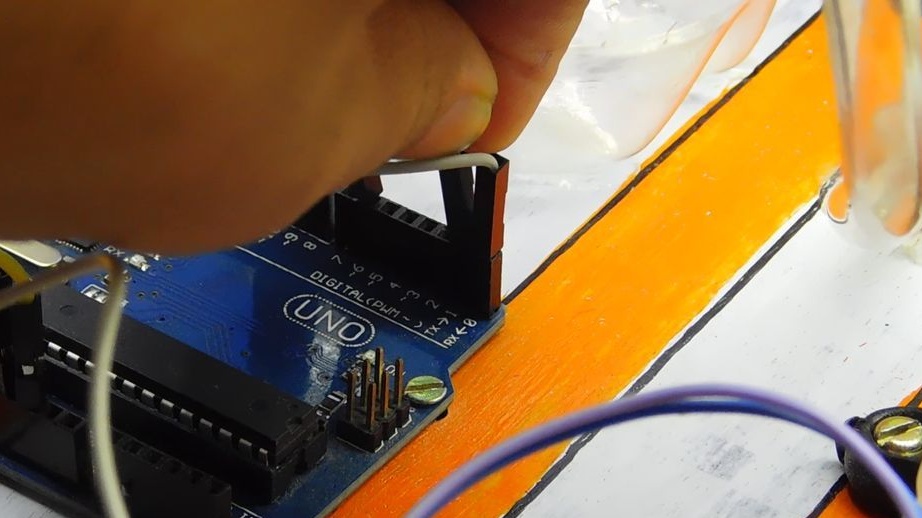
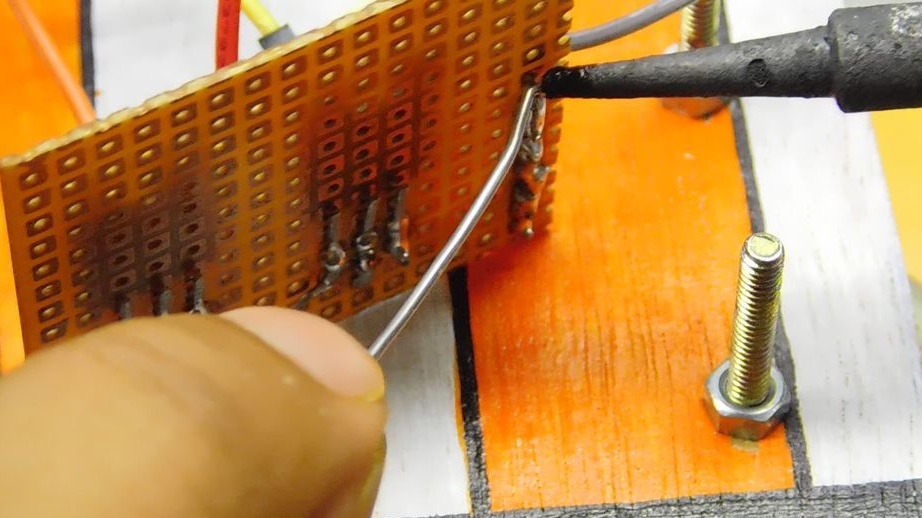
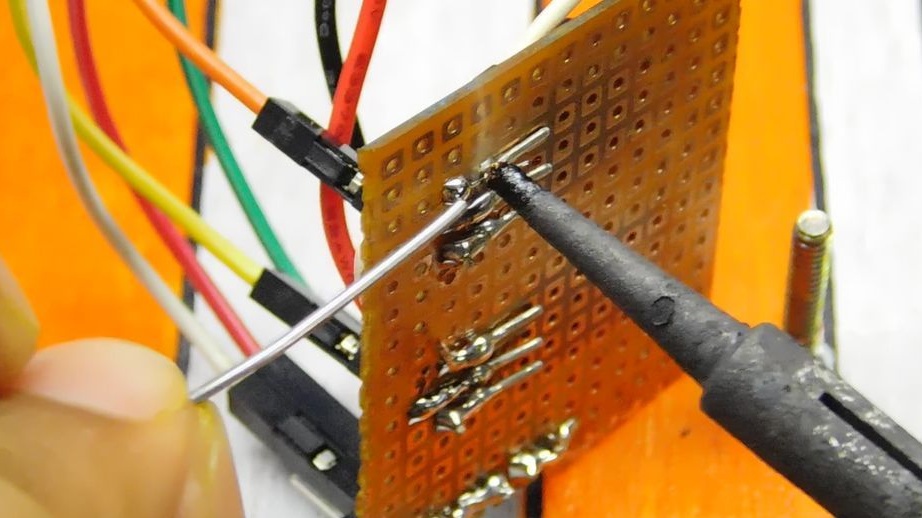
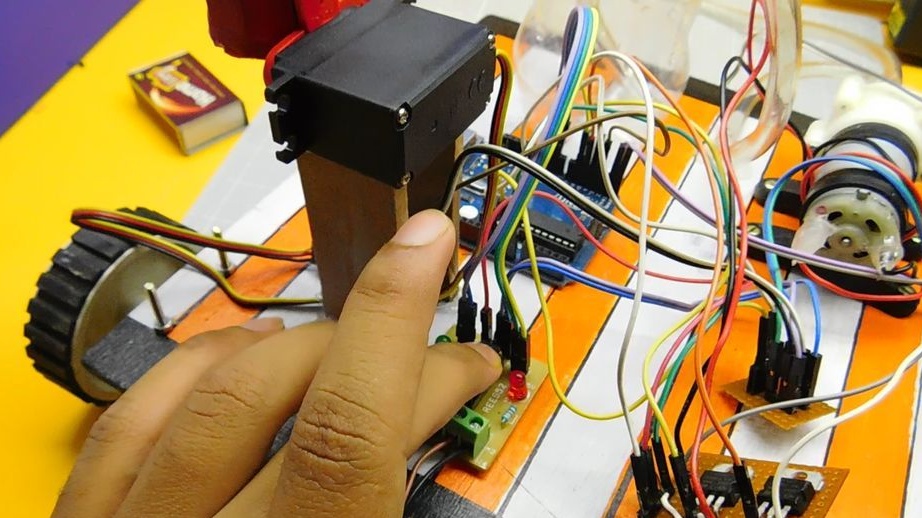
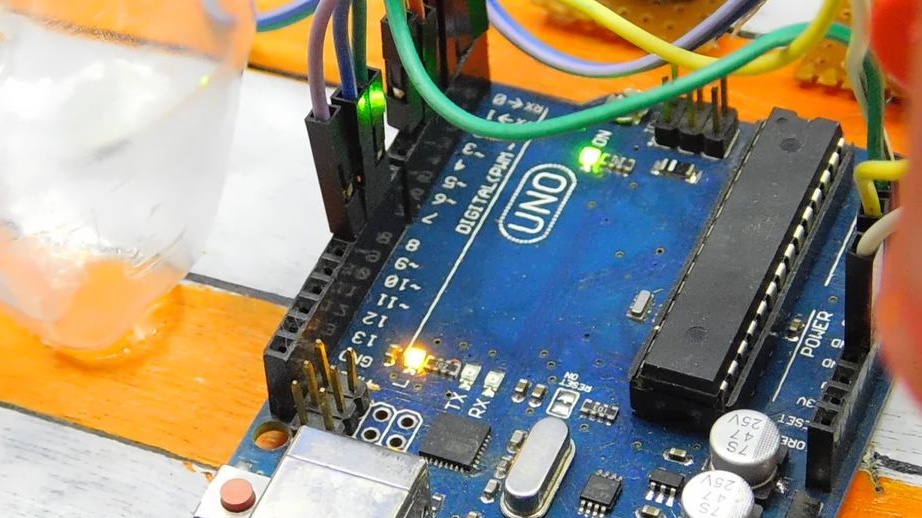
Penktas žingsnis: „Arduino“ grandinės įrengimas
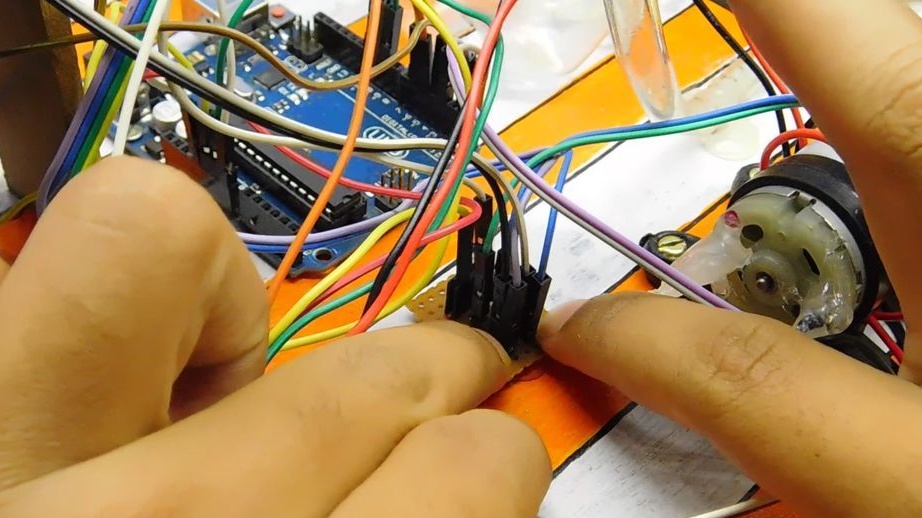
Pritvirtina Arduino prie platformos ir prijungia elektrinius prietaisus prie plokštės.
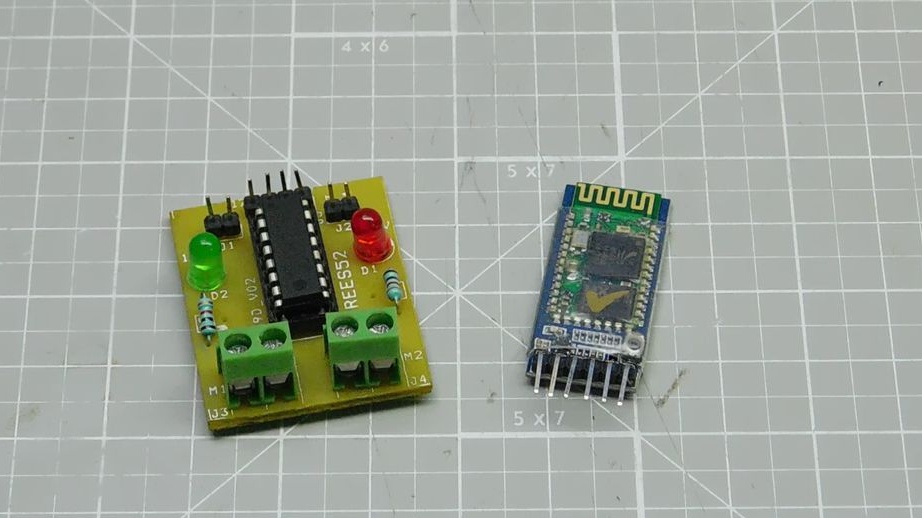
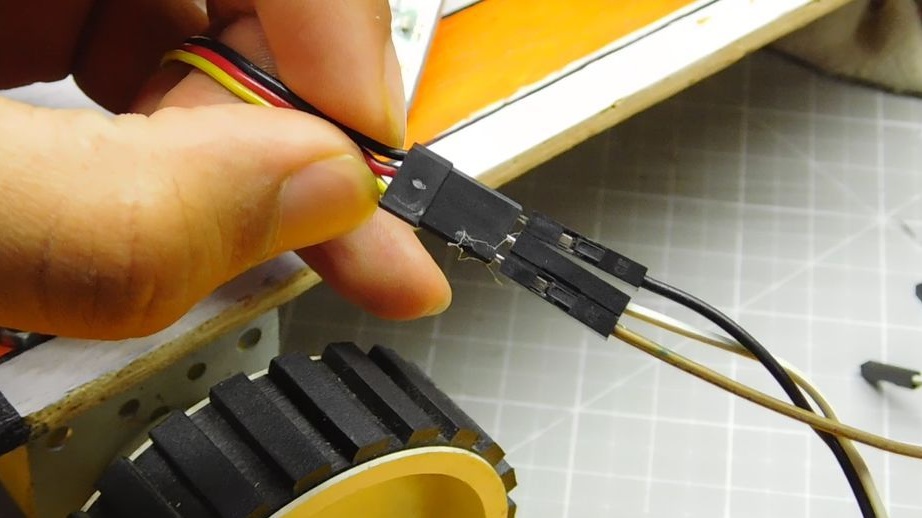
Variklio valdymo modulis.
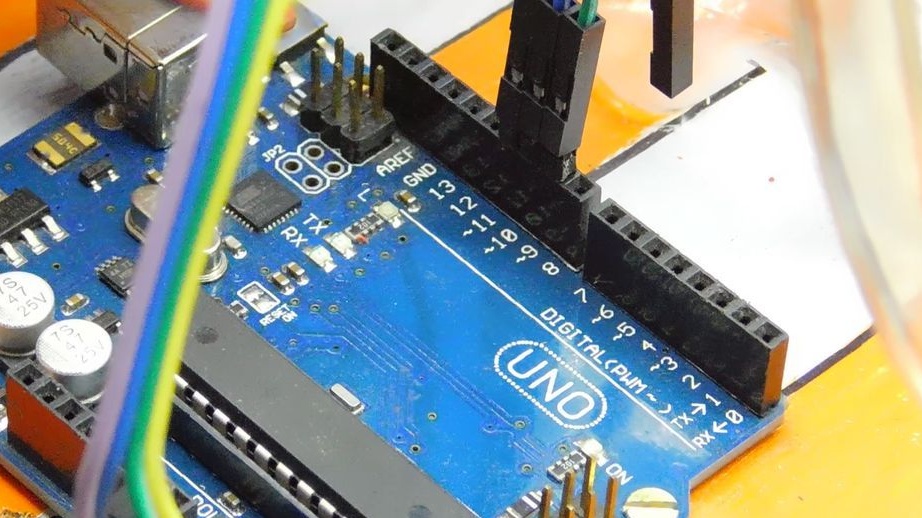
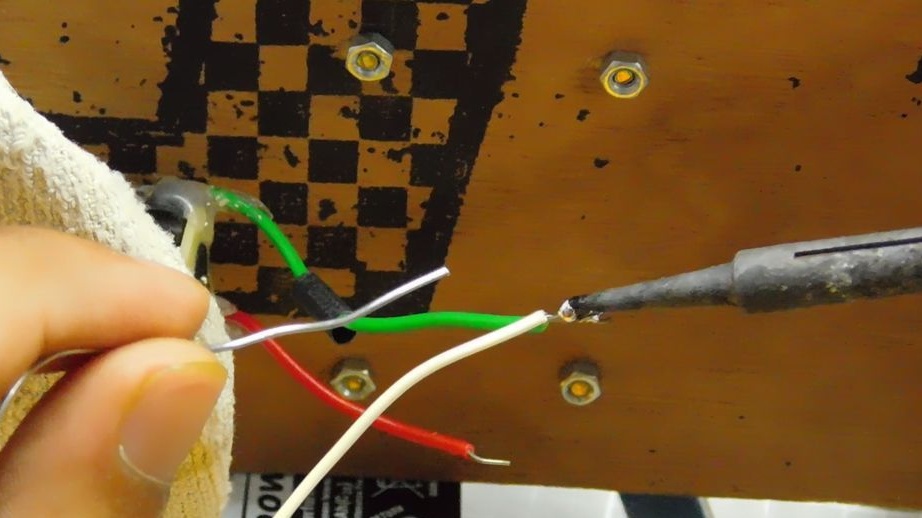
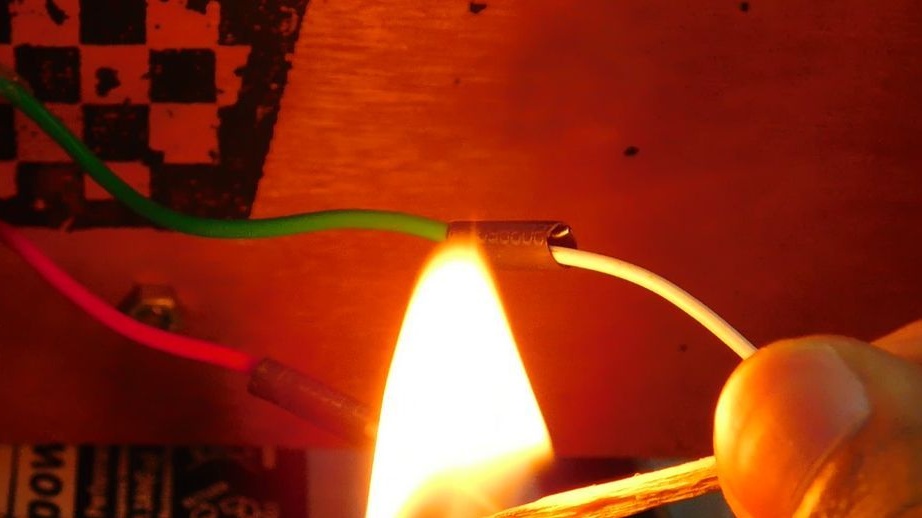
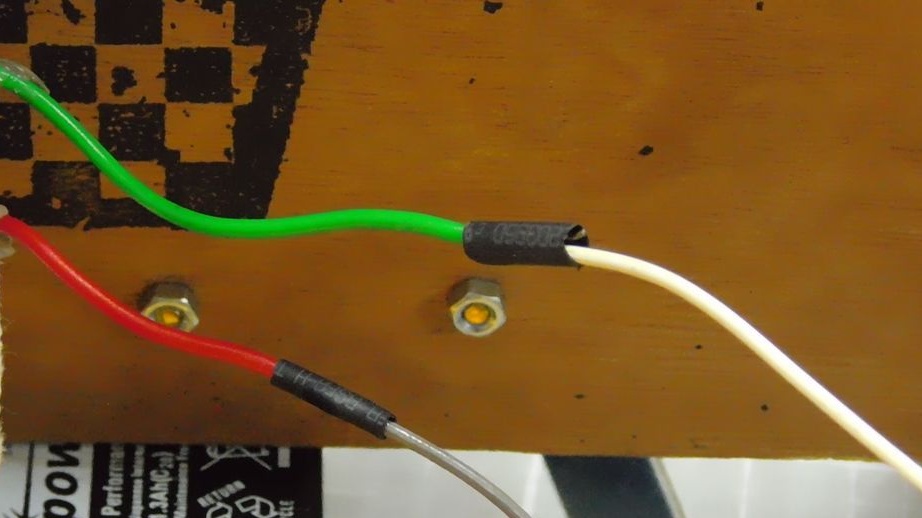
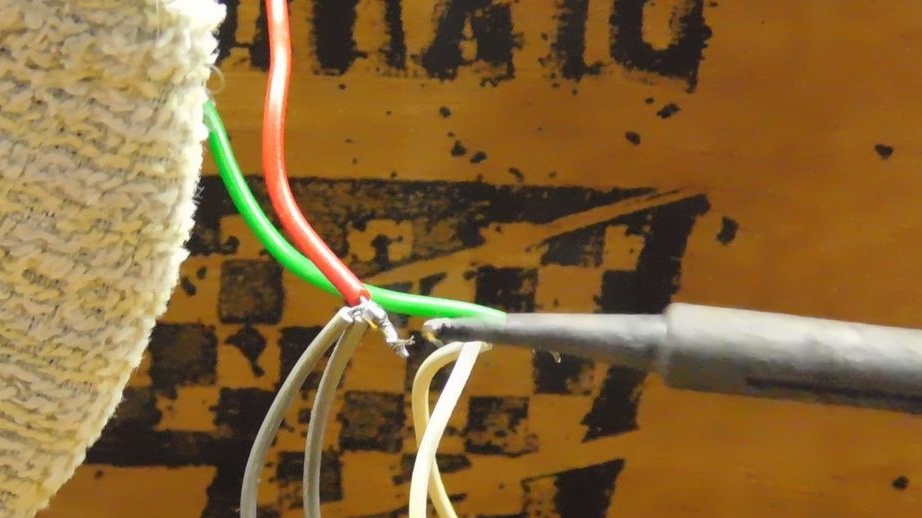
Litavimas prie variklių (ant kurių pritvirtinami ratai, o ne šepečiai) laidai. Pritvirtina laidus modulio tvirtinimo lizduose. Tada prijunkite modulį prie Arduino taip.
Modulis ::: Arduino
1 - D6
2 - D9
3 - D10
4 - D11
+ 5V - + 5V
Gnd-gnd
+ 12 V modulis bus prijungtas prie akumuliatoriaus.
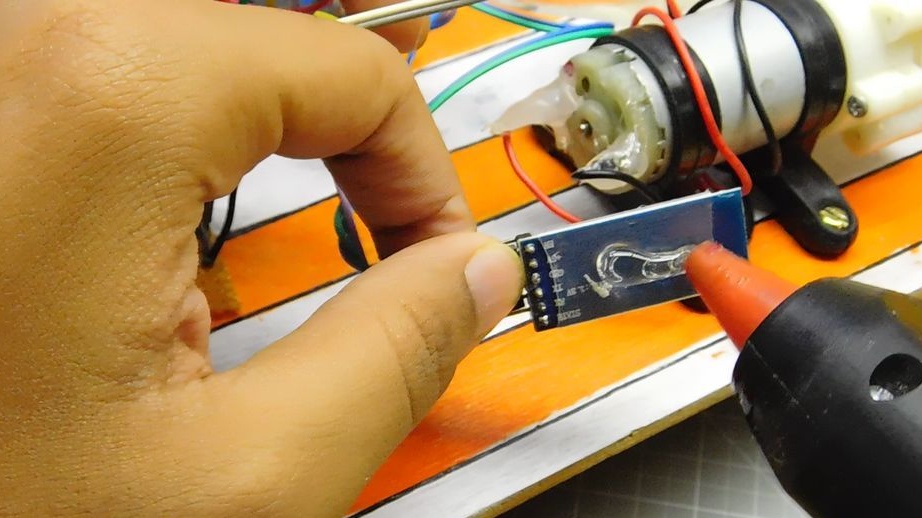
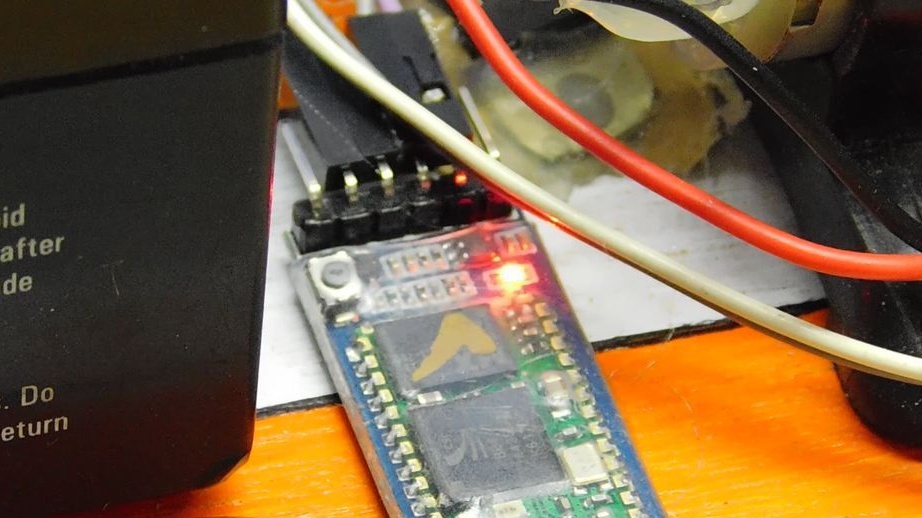
„Bluetooth“ ryšys.
„Bluetooth“ ::: „Arduino“
Vcc - + 5 V
Gnd - gnd
Rx - Tx
Tx - Rx
Servovariklis ::: Arduino
Vcc - + 5 V
Gnd - gnd
Signalas - D3
Tada pagal schemą jis sujungia siurblio ir šepečių variklius. Šepečių varikliai yra sujungti lygiagrečiai ir sukasi skirtingomis kryptimis, į dešinę pagal laikrodžio rodyklę ir į kairę prieš laikrodžio rodyklę.

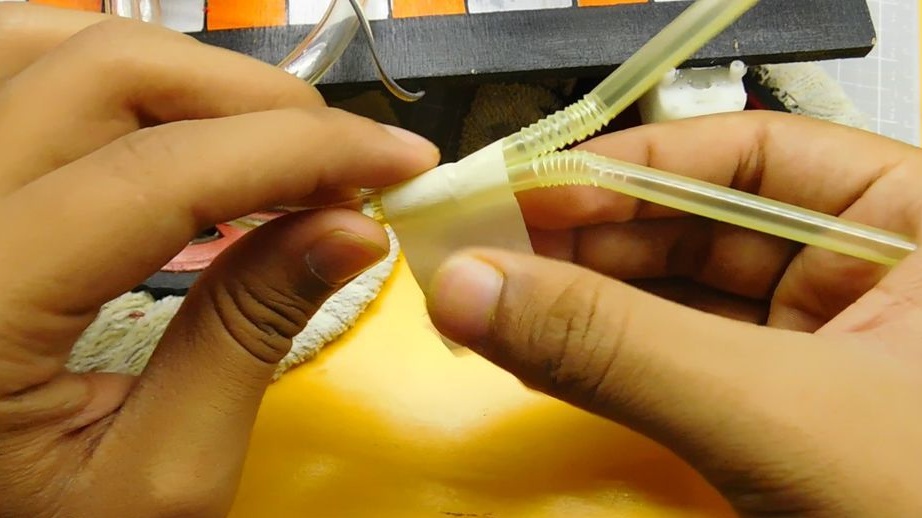
Šeštas žingsnis: Robotų dalių tvirtinimo detalės
Supjaustykite du maždaug 7 cm ilgio kokteilių šiaudelius. Įdėkite šiaudelius į vandens tiekimo vamzdį. Sutvirtinkite šiaudelius prieš šepečius.




Spynos ant platformos elektroninis komponentai.

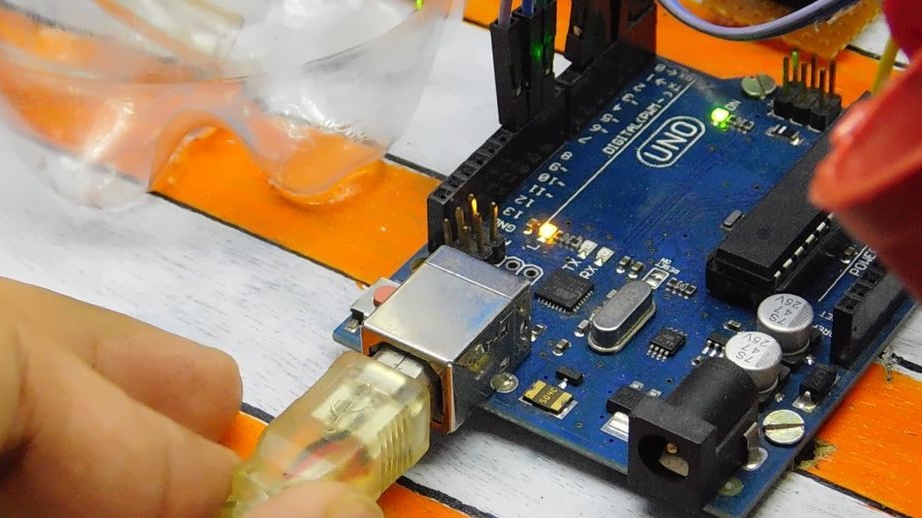
Septintas žingsnis: atsisiųskite kodą
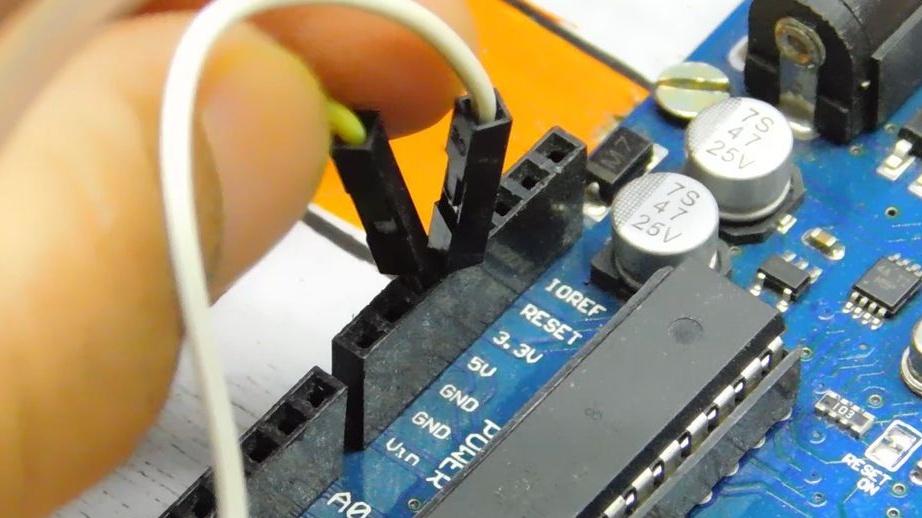
Pašalina Rx ir Tx džemperius nuo Arduino lentos. Prijungia plokštę prie kompiuterio. Įkeliamas kodas. Nustato džemperius vietoje. .
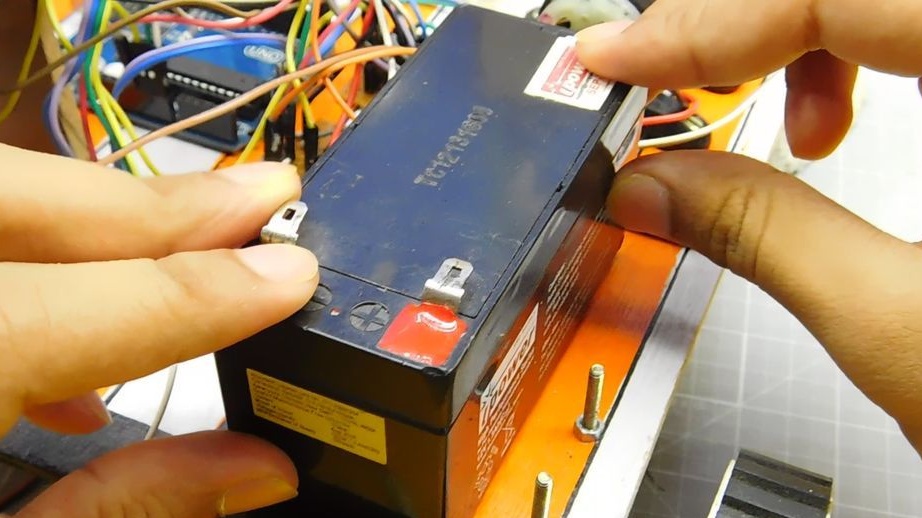
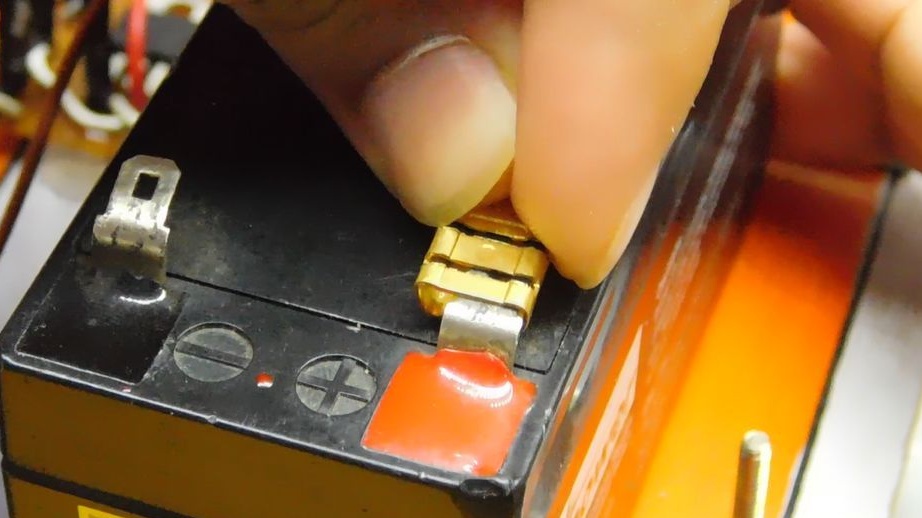
Aštuntas žingsnis: Baterija
Naudodamas dvipusę juostą, pritvirtina akumuliatorių platformoje. Prijungia elektroninius prietaisus prie akumuliatoriaus. „Arduino“ meistras pataria jungtis per įtampos daliklį. Taip pat galite pridėti jungiklį prie grandinės.

Devyni žingsniai: valdykite robotą
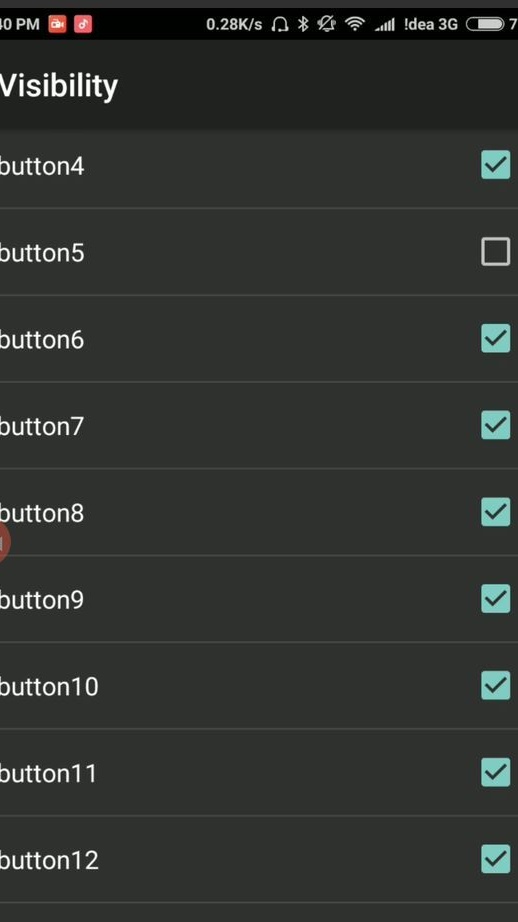
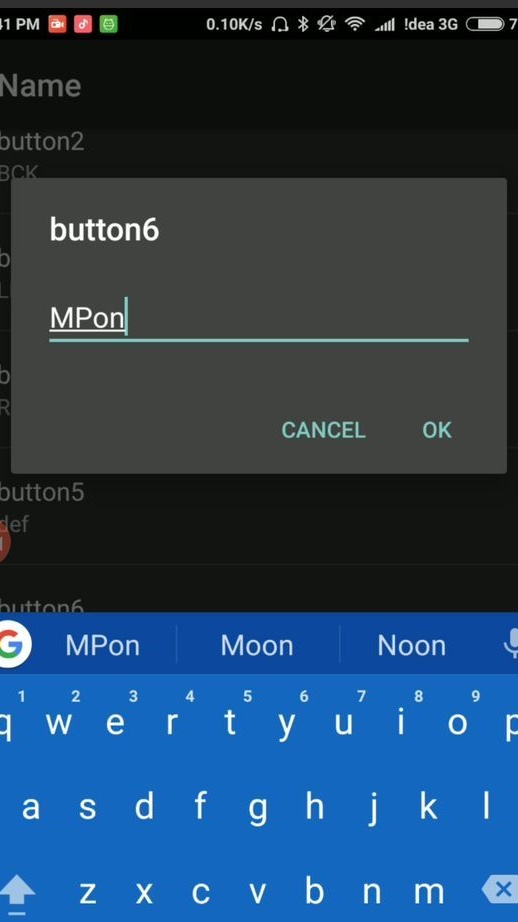
Iš „Google Play“ vedlys atsisiunčia programą „Bluetooth Serial Controller“. Atidaroma programa. Einama į nustatymus> matomumas. Išjungia mygtukus 5, 9, 12. Pereina prie vardų. Kiekvienam mygtukui priskiriamas 2–3 raidžių mygtukas. Žiūrėkite nuotrauką žemiau.
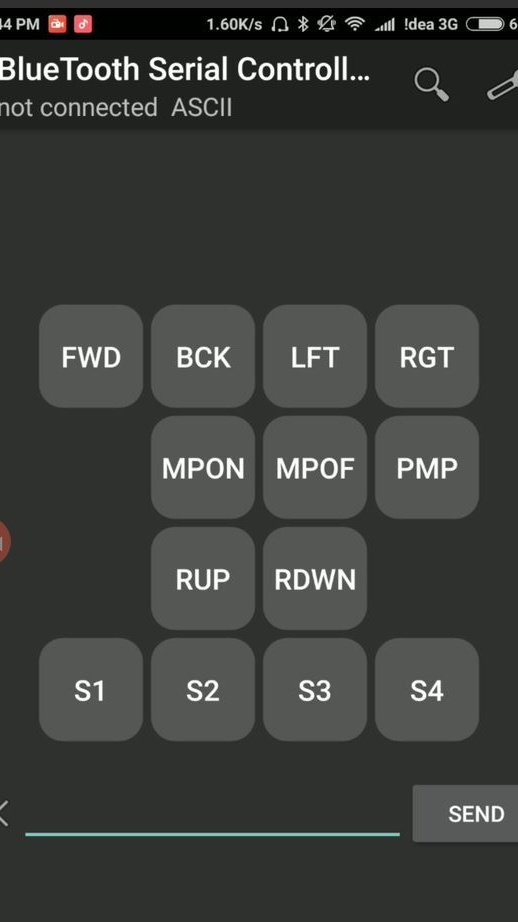
Tada kiekvienas mygtukas įdiegia komandą (citatos turi būti pašalintos, nekeiskite didžiosios ir mažosios raidės):
1 mygtukas (FWD): „F“
2 mygtukas (BCK): „B“
3 mygtukas (LFT): „L“
4 mygtukas (RGT): „R“
6 mygtukas (MPON): „M“
7 mygtukas (MPOF): „m“
8 mygtukas (PMP): „P“
10 mygtukas (RUP): „U“
11 mygtukas (RDWN): „u“
13 mygtukas (S1): „1“
14 mygtukas (S2): „2“
15 mygtukas (S3): „3“
16 mygtukas (S4): „4“
Sustabdydamas komandas> komandas, priskiria komandas tik šiems mygtukams:
1 mygtukas: „S“
2 mygtukas: „S“
3 mygtukas: „S“
4 mygtukas: „S“
8 mygtukas: „p“

Dabar belieka prisijungti prie „bluetooth“ modulio („HC-05“), įvesti slaptažodį (1234 arba 0000) ir galite pabandyti išvalyti kambarį -)))
Ačiū šeimininkui ir linkime jam patobulinti robotą ir iš jo gauti visiškai savarankišką darbą.
Visą roboto valiklio surinkimo procesą galite pamatyti vaizdo įraše.