
Aš nusipirkau sūnui šaunų žaislą ant Ali - ekskavatoriaus per radijo pultelį.
Tai pasirodė esąs rimtas trūkumas, kuris išreiškiamas nesant strėlės ribotuvų. T. y. jei pakeliate rodyklę maksimaliai, tada ji pradeda trūkinėti, tas pats pasakytina apie bokšto sukimąsi aplink ašį (670 laipsnių). Dėl to dabar dažnai atsiranda įtrūkimas net ir su maža apkrova. Aplink ašį ji paprastai sukasi viena kryptimi su dideliais sunkumais. Išardžiau šį įrenginį ir man kilo idėja jį patobulinti.
1. Pakeiskite važiuoklės variklius kitais, galingesniais (nors šiuo metu tai yra aktualu). Ir sureguliuokite greitį. Dabar greitis yra vienas, pastovus - pirmyn arba atgal.
2. Nustatykite sijos judėjimo ribotuvus, kurie pasiektų maksimalų sijos pakėlimą ir sustotų, tada tik priešinga kryptimi.
3. Pakeiskite strėlės variklius pakopiniais varikliais arba servopavaromis. Čia labai reikalinga supratimo žmonių pagalba. Kuris yra geresnis už šį vaidmenį? Ar jis išvis tinka? Norėčiau, kad ekskavatorius susidorotų su užduotimis, kad jaustųsi šiek tiek sudėtingiau, nei pakrauti supjaustytą smėlį, nors jam dabar tai sudėtinga - krumpliaračiai trūkinėja ...
4. Baterija yra galingesnė ir didesnė, kad ją būtų galima įdiegti. Šiuo atveju yra atsvaros plieniniai strypai. Galite tiesiog užpildyti vietą. Yra daug erdvės eksperimentams :)
5. Atitinkamai noriu pakeisti paties ekskavatoriaus lentą arduino ir pridėti „WiFi“ modulį prietaisui valdyti. Nuotolinio valdymo pultas taip pat turės padaryti kitą. Čia klausimas. Kuris arduinka imtis? kuris susitvarkys? Nano, uno? Reikės 6 variklius prijungti prie arduino (važiuoklės - 2, prie bokšto, 3 - prie strėlės). Ar gali prireikti įtampos stabilizatoriaus?
Apskritai, ką galėtumėte patarti įgyvendinant šią idėją? Jei manote, kad užduotis neįmanoma, paaiškinkite, dėl kokios priežasties prašome. Aš tikrai noriu daryti su savo sūnumi, net jei jis yra įpratęs mokytis naujų dalykų, o ne mokytis ... :)
NUOTRAUKOS.
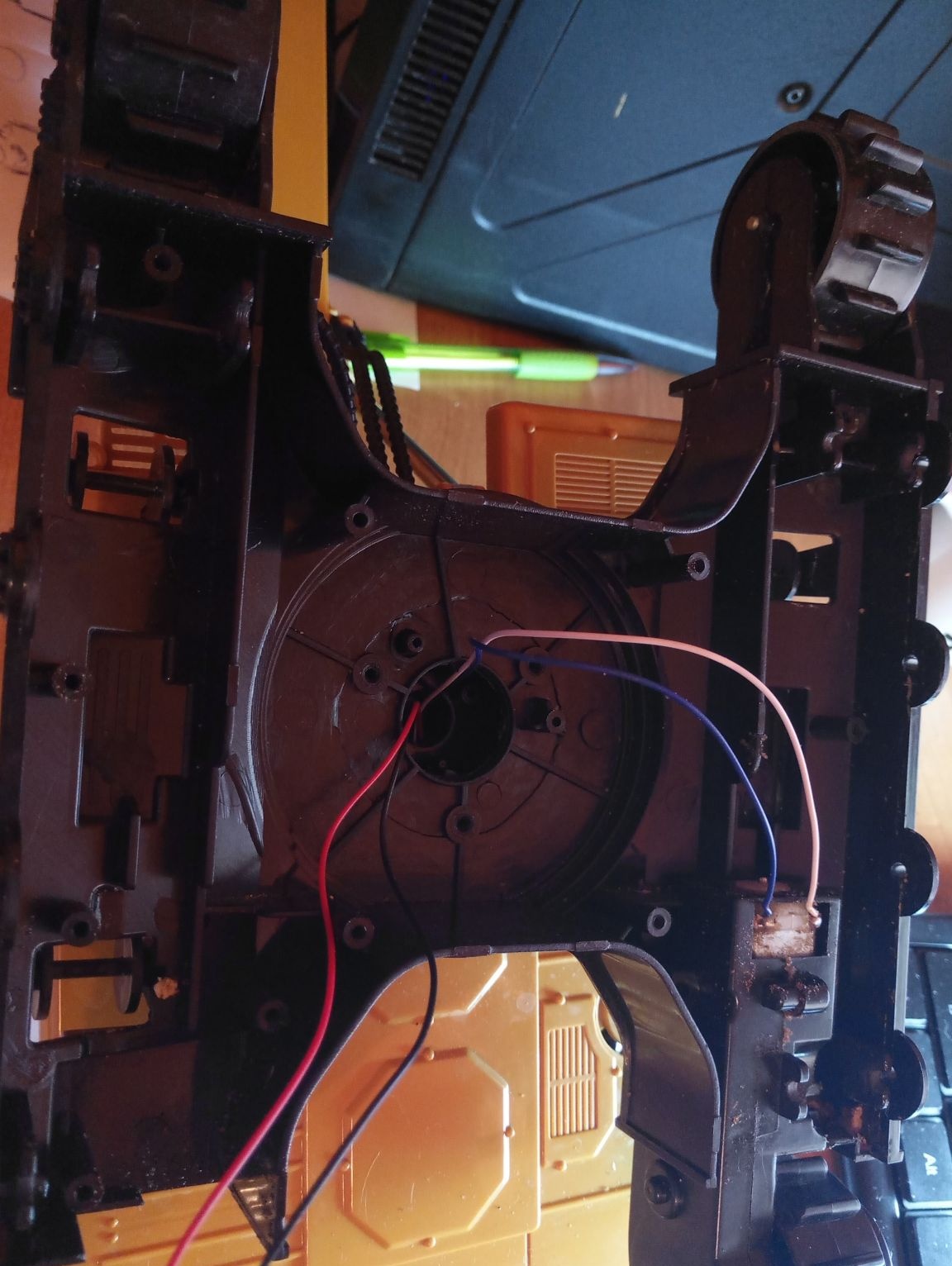
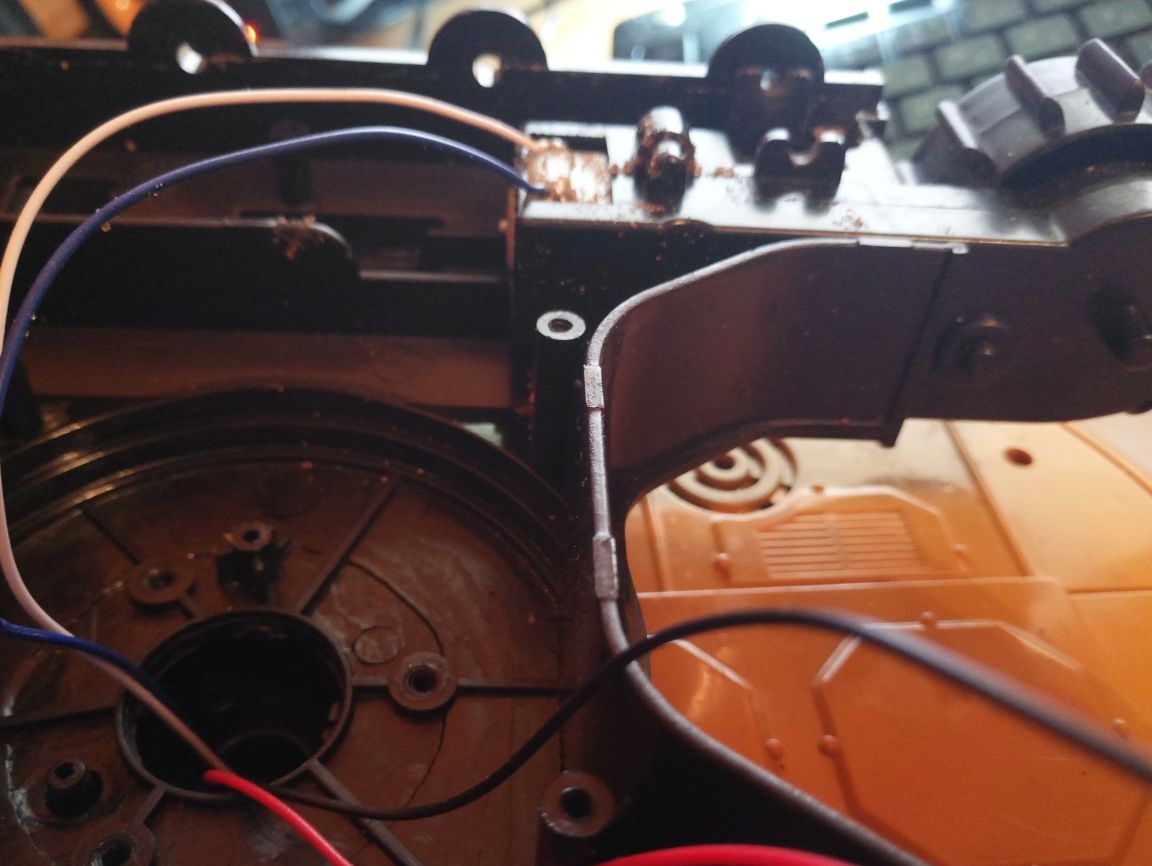
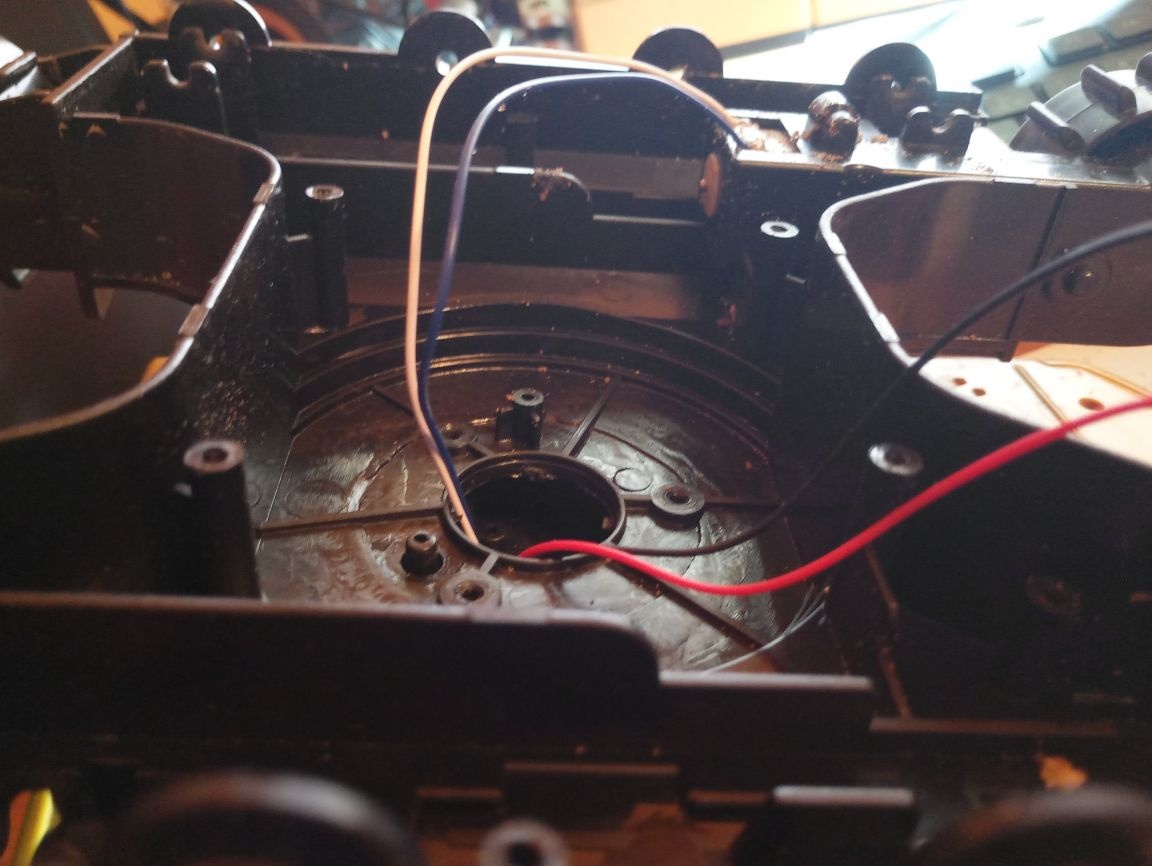
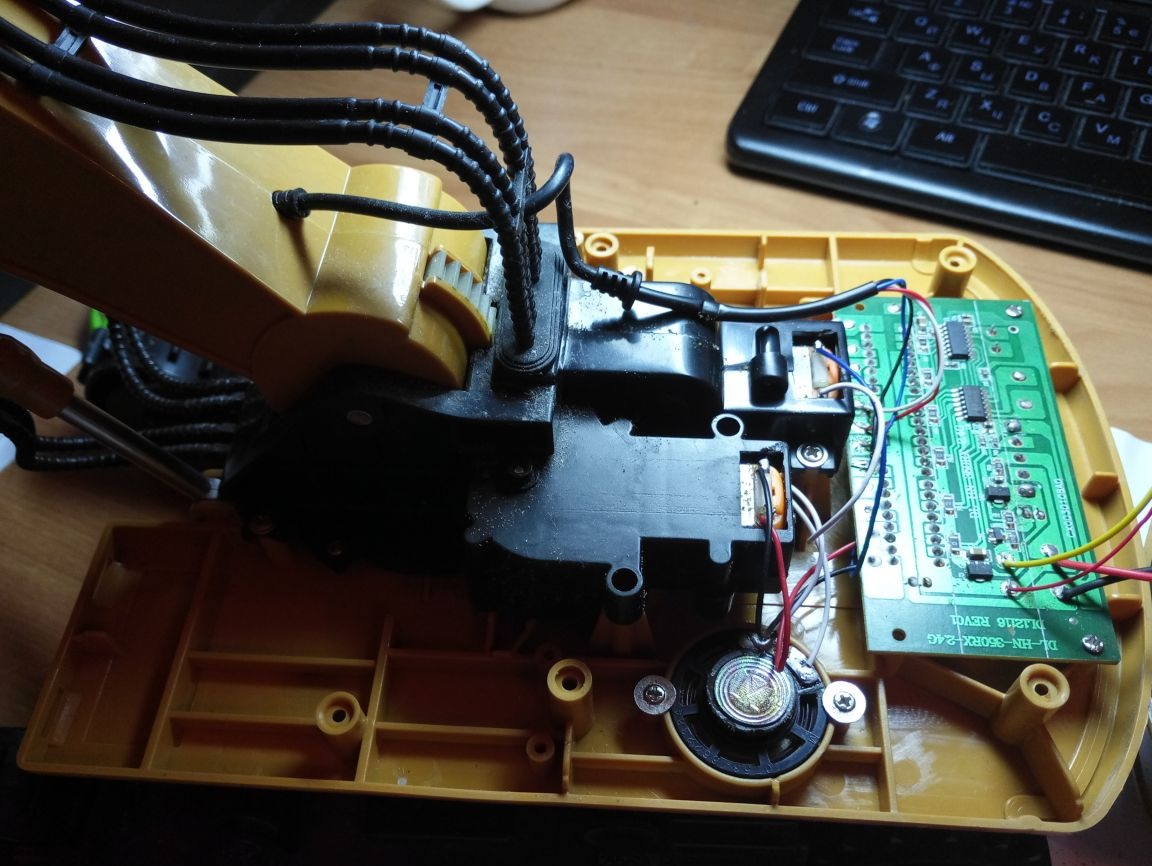
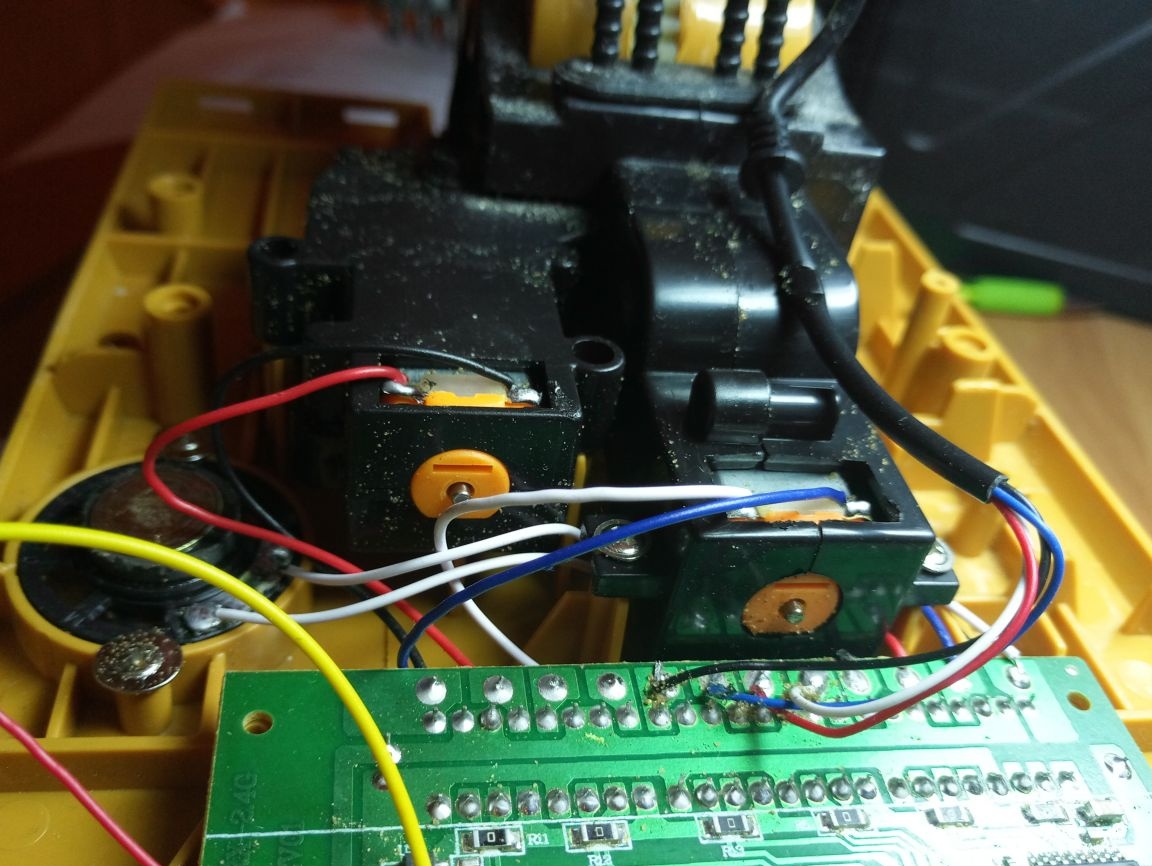
patys mechanizmai buvo išardomi tik važiuoklėje, nelipo į strėlę