

Norite kovoti tarp vorų-robotų? Tada atidžiai išstudijuokite šį straipsnį, jame meistras jums pasakys, kaip padaryti tokį vorą. O kad paaiškintumėte jo darbą, pažiūrėkime į vaizdo įrašą.
Įrankiai ir medžiagos:
Už vorą
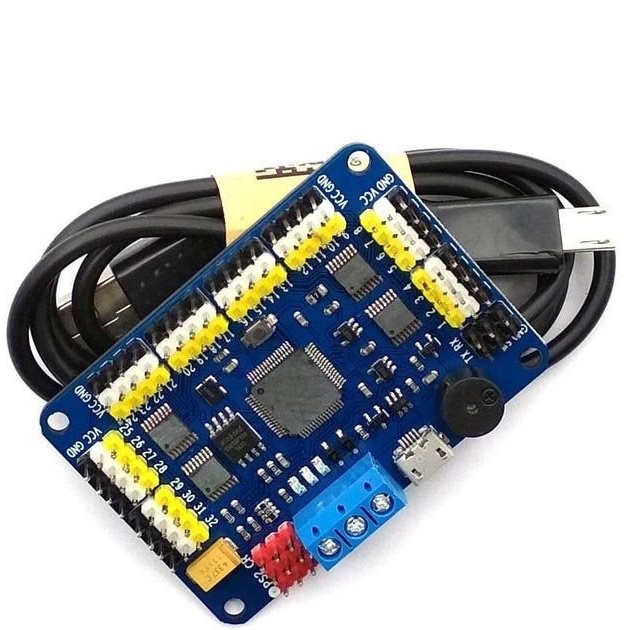
32 kanalų servo valdiklis;
-Wemos D1 Mini valdiklis;
- „MG90S Servo Drives“ - 18 vnt;
-Ubec 6A 5V valdiklis;
- DC-DC buck keitiklis;
- Džemperiai;
-Akumuliatorius;
Už bokštą
-Dvieji varikliai;
-Maitinimo modulis;
- nuleidžiamasis keitiklis;
Servo;
-3D spausdintuvas;
-Klimo pistoletas;
-Klijai;
- atsuktuvas;
-Tvirtinimo detalės;
- dvipusė juosta;
-Smaugikliai;
-Knife;
-Nadfilai;
-Plastiniai rutuliai;
-Litavimo reikmenys;






Pirmas žingsnis: Spausdinkite dalis
Pirmiausia turite atspausdinti kūno ir kojų detales 3D spausdintuve. Čia galite atsisiųsti failus spausdinti nuorodą.


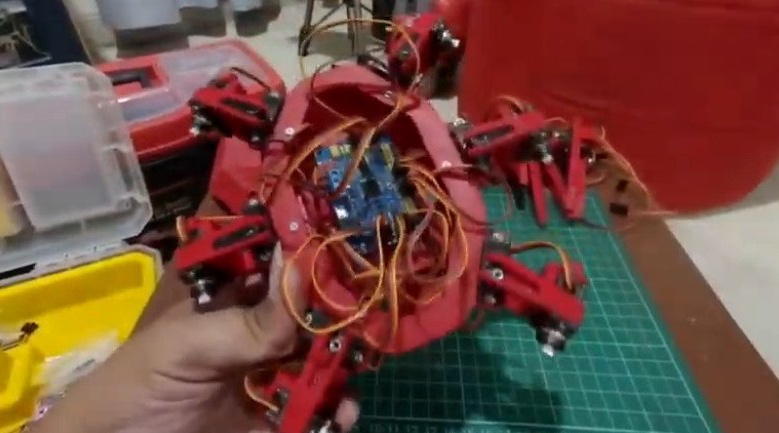
Antras žingsnis: pastatykite
Dabar reikia surinkti robopauką.
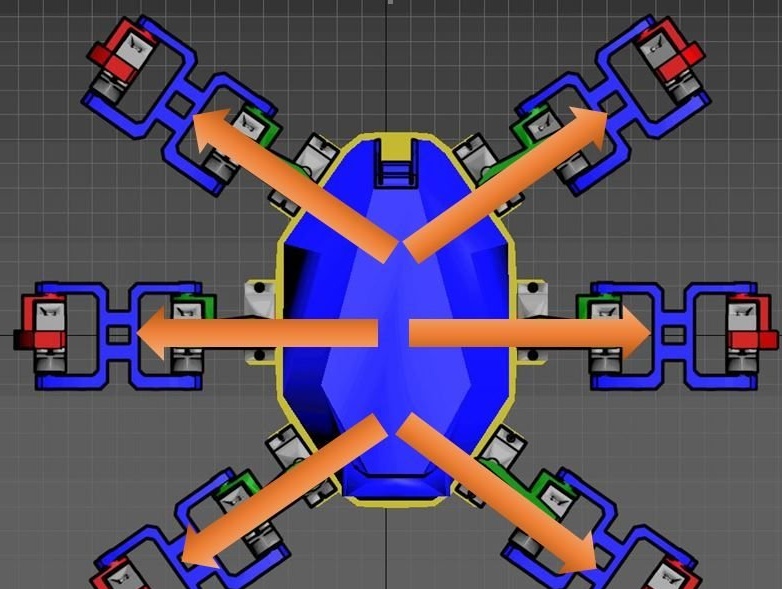
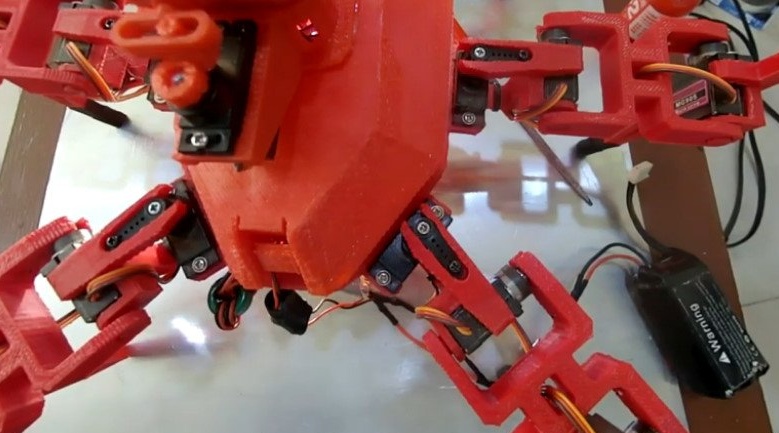
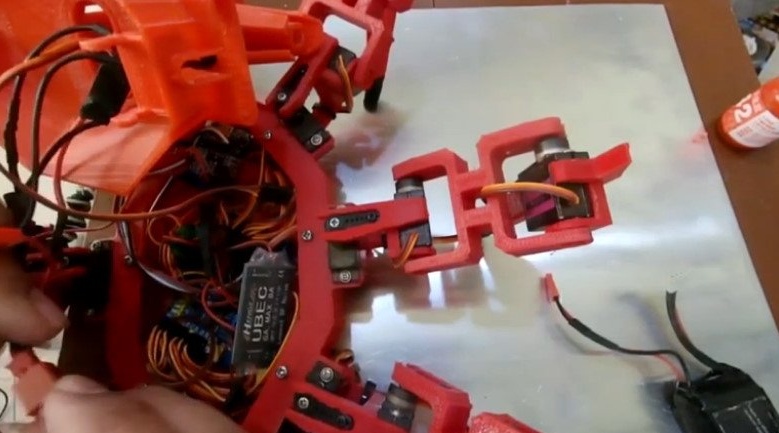
Meistras montuoja servas ant voratinklio kojų sąnarių. Iš viso robotas turi šešias kojas ir tris „servo“ ant kiekvienos kojos.








Diegia servose ant važiuoklės platformos.




Sutvirtina pirmuosius kojų sąnarius prie platformos servo.




Laidai yra traukiami į technologines skylutes ir prijungiami prie valdiklio.





Įdiegia įrašus.


Nustato antrąsias kojų sąnarius. Prijungia laidus iš servo į valdiklį.






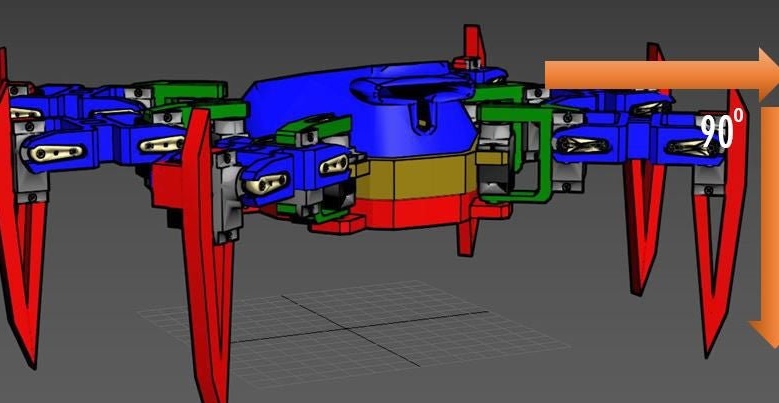
Įdiegia trečią jungtį. Naudodamas šį jungtį, voras judės link paviršiaus.


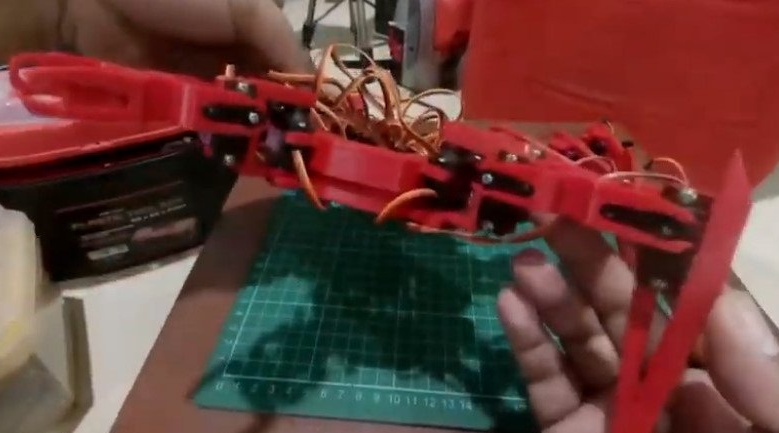

Prijungia ir patikrina kiekvieno servo pavaros veikimą.



Jei viskas paprastai pritvirtina laidus su kaklaraiščiais, įdiekite akumuliatorių ir uždarysite dangtelį.



Sukūrimo procesą galima pamatyti vaizdo įraše.
Trečias žingsnis: Apie elektronika
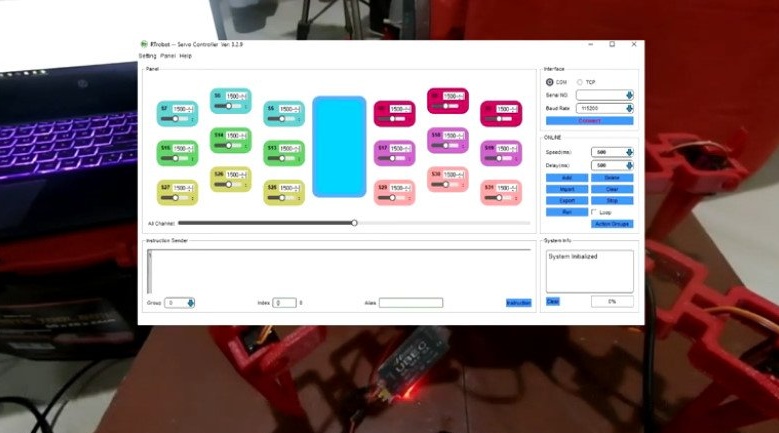
Vedlys judesiams valdyti naudojo „RTrobot“ servo valdiklį. Valdymo programą galima atsisiųsti čia arba čia.
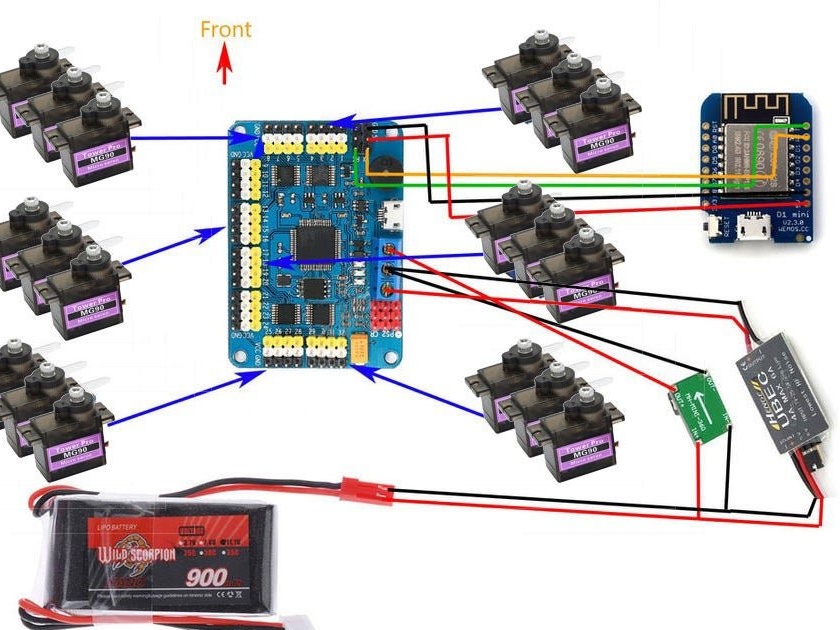
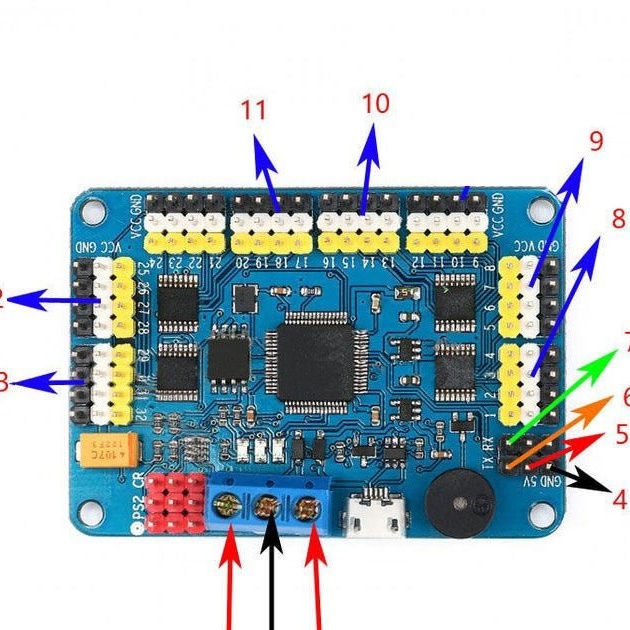
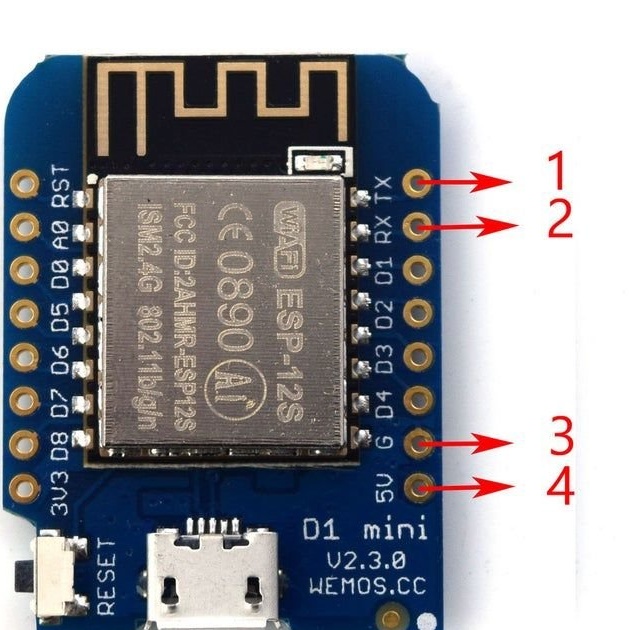
Viskas susieta taip:
1. 5 V (+) UBEC išėjimas
2. Žemė iš UBEC ir „Buck“ keitiklio
3. 5 V maitinimo šaltinis (+) iš keitiklio
4. ant „Wemos D1 mini G“ kaiščio
5. į „Wemos“ 5v
6. į „Wemos D1 RX“
7. „Wemos TX“
Servo pavaros jungiamos prie 8–13 kaiščių.
Įdiekite kodą „NodeMCU“. Galite atsisiųsti čia.
„WeMos D1 mini“ yra minimali „ESP8266“ „Wi-Fi“ kortelė.
Naudodami „wemos D1 mini“ kaip WIFI prieigos tašką, galite nusiųsti serijos komandą į servo valdiklį. Viskas, ko reikia, yra tik mirksėti „nodeMCU“ plokštę su kodu, ir jūs galite prijungti išmanųjį telefoną prie „nodeMCU AP“. Tada naudodamiesi žiniatinklio naršykle eikite į http://192.168.4.1.
Tai svarbu.
kai įjungiate servodarą, visos servos pasislinks į pradinę / standartinę padėtį
kuo tiksliau įdiekite servas, kaip parodyta aukščiau esančiame paveikslėlyje arba vaizdo įraše
sureguliuokite sąnarių padėtį, išjunkite ir vėl įjunkite prietaisą, kad įsitikintumėte, jog visos kojos yra teisingoje padėtyje
jei sąnariai užsikimšo, trinkite, sureguliuokite padėtį.
Ketvirtas žingsnis: Bokštas
Dabar mes kreipiamės į bokšto surinkimą.
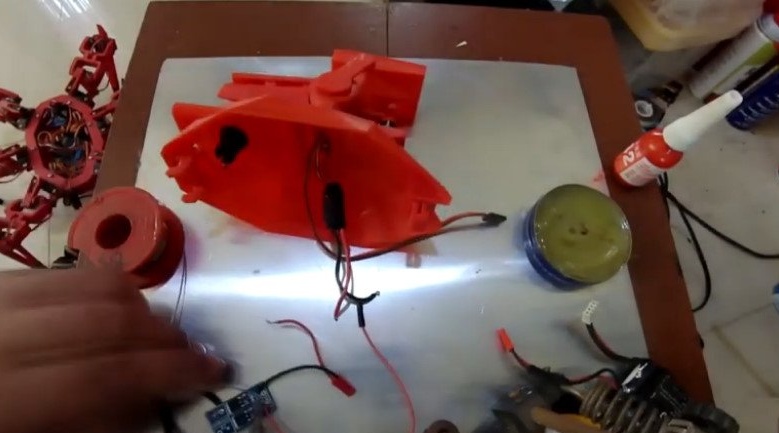
Pirmiausia reikia atspausdinti bokšto detales. Čia galite atsisiųsti failus nuorodą.
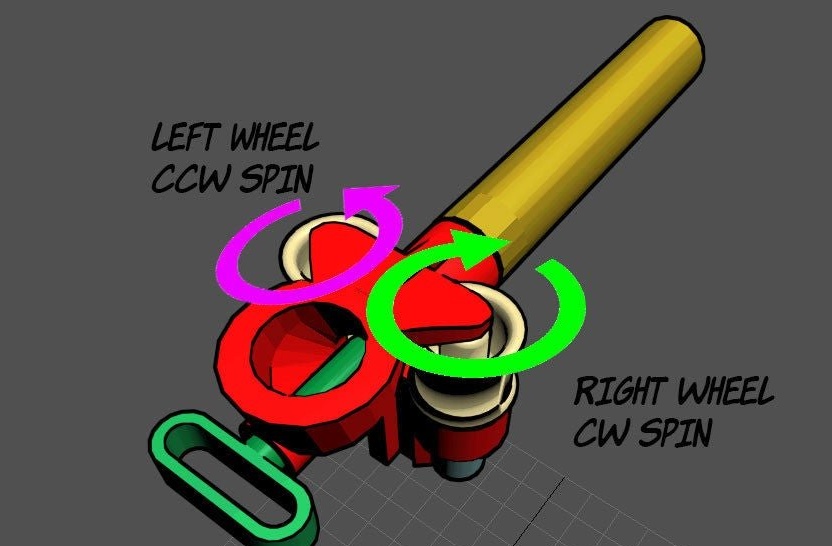
Tada kapitonas pradeda surinkti bokštą. Bokšto pasukimo ir elektrinių dalių prijungimo grandinė yra žemiau.
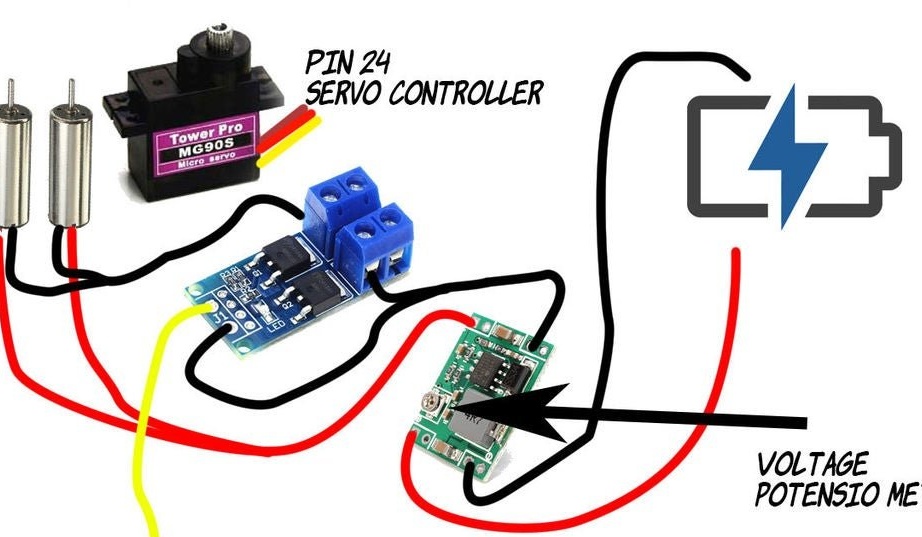
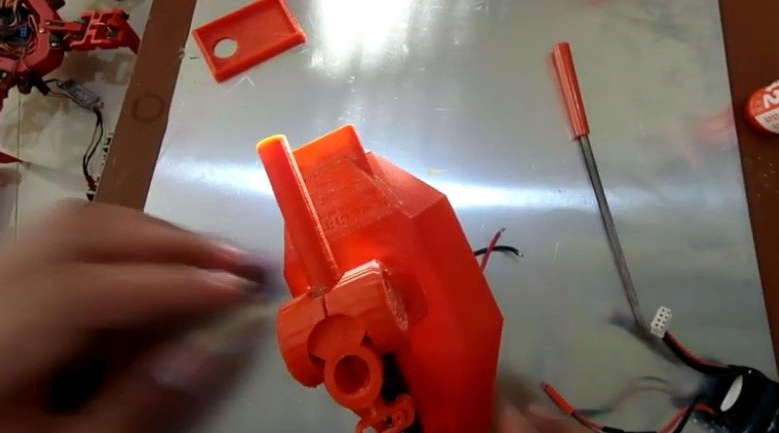
Įdiegia bokštą servo.







Dvipusė juosta prilimpa prie ritinėlių.


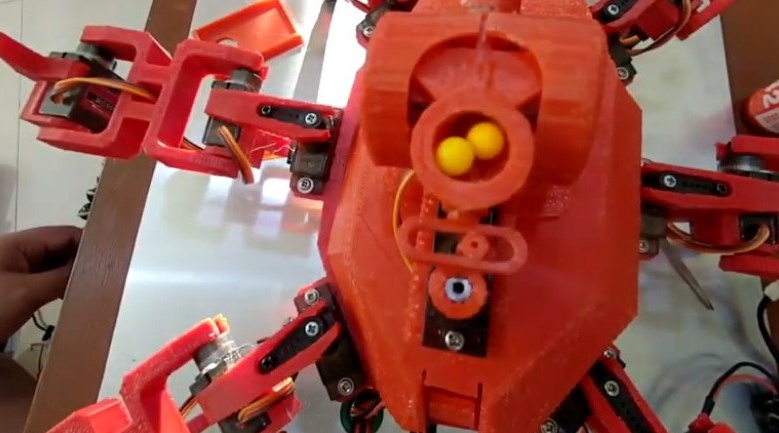
Renka ginklą. Įdiegia variklius į laikiklį. Sumontuokite ritinėlius ant variklio velenų.







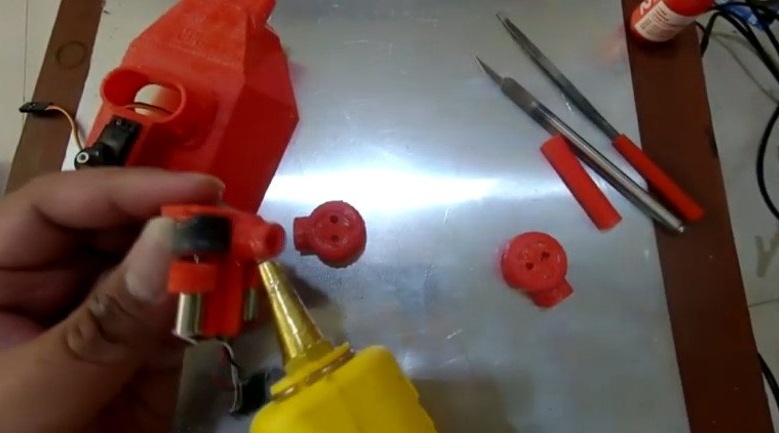
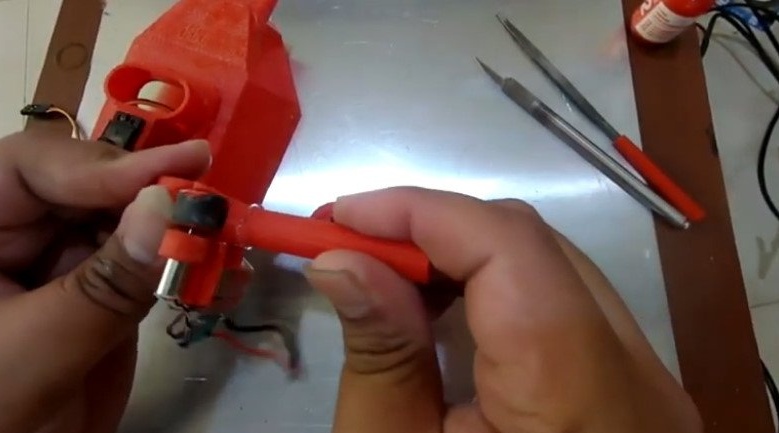

Prijungia laidus ir surenka bokštą.




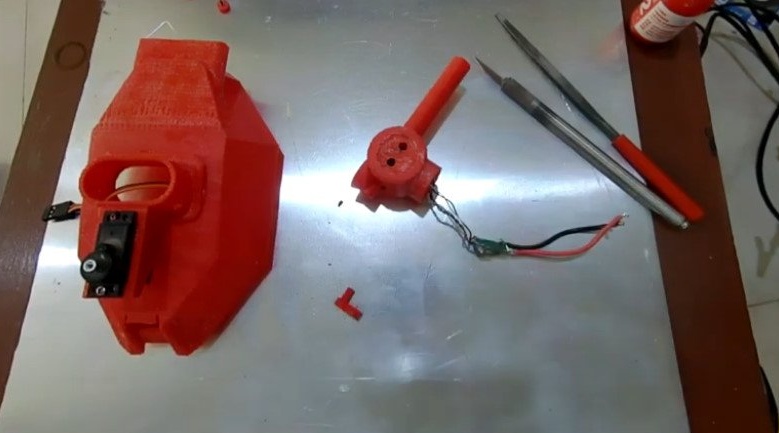
Pakrauna apvalkalus ir patikrina pistoleto veikimą. Mechanizmą galima sureguliuoti perkeliant laikiklį ant servo veleno.


Tai atlieka galutinį sujungimą, surinkimą ir patikrinimą.




Vaizdo įrašą su bokšto surinkimu galite pamatyti žemiau.
Viskas paruošta. Surinkite dar vieną tokį robopauką ir galėsite organizuoti muštynes.
