







Pagrindinė šio projekto idėja yra ta, kad įvairių smegenų bangų pagalba vartotojas galės valdyti robotą, žymeklį savo kompiuteryje arba įjungti / išjungti apšvietimą savo namuose, o mikrovaldiklis („Dalelių fotonas“) sukuria internetinę vartotojo smegenų bangų analizę. Taigi taip, naudodamiesi šiuo prietaisu tikrai galite naudoti „Minties galią“
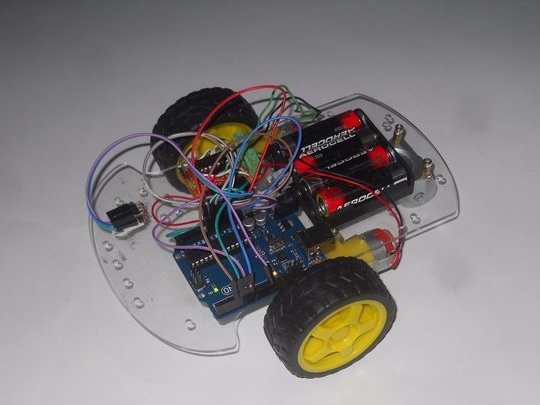
 ... Šis prietaisas yra skirtas ne tik tinginiams ar gerbėjams, jis buvo sukurtas siekiant suteikti žmonėms galimybę. kurie kiekvieną dieną kovoja su savo negalia. Robotassukurta autoriaus veikia lygiai taip pat kaip ir vežimėlių sistema namo automatika padės vartotojui valdyti šviesą ar televizorių, net jei jis negali judėti. Kompiuterio valdiklio režimas gali būti naudingas net ir visiškai sveikiems.
... Šis prietaisas yra skirtas ne tik tinginiams ar gerbėjams, jis buvo sukurtas siekiant suteikti žmonėms galimybę. kurie kiekvieną dieną kovoja su savo negalia. Robotassukurta autoriaus veikia lygiai taip pat kaip ir vežimėlių sistema namo automatika padės vartotojui valdyti šviesą ar televizorių, net jei jis negali judėti. Kompiuterio valdiklio režimas gali būti naudingas net ir visiškai sveikiems. Kaip tai veikia?
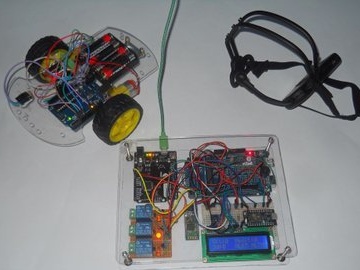

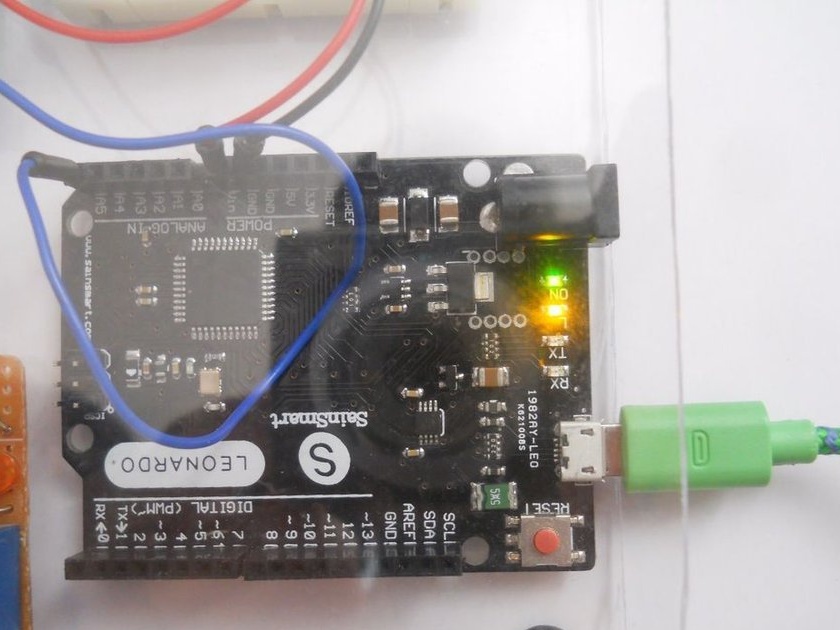
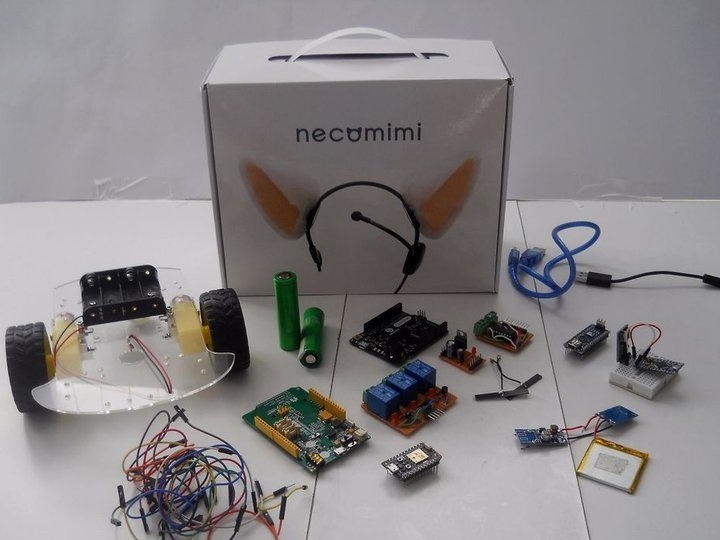
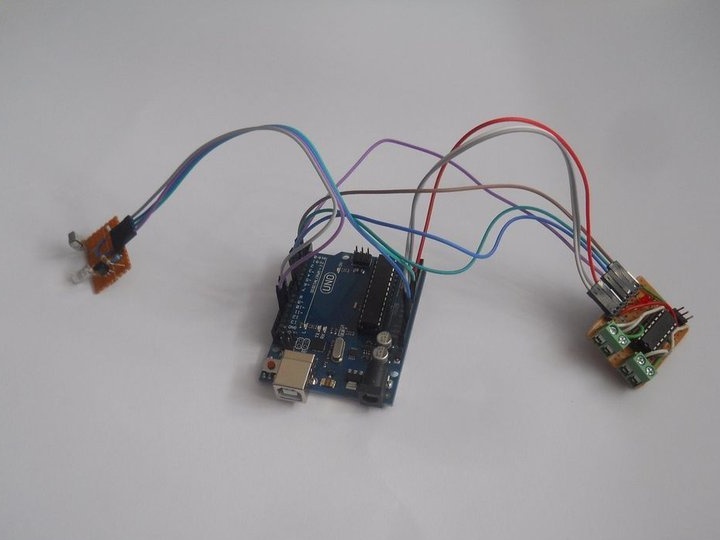
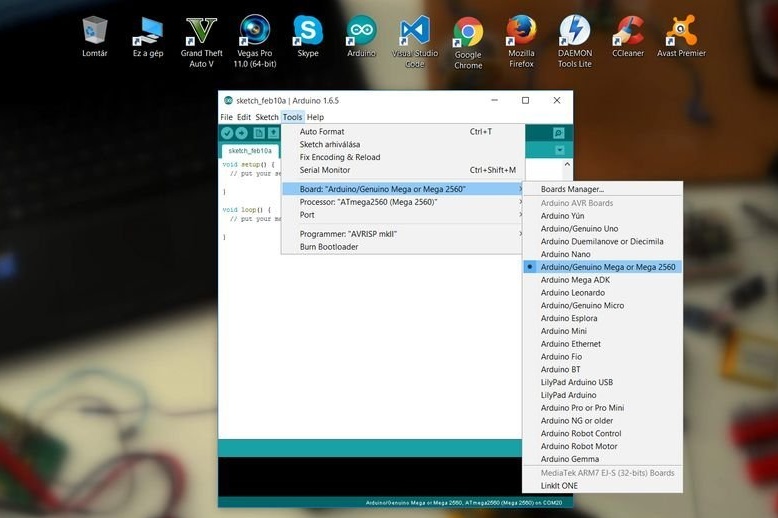
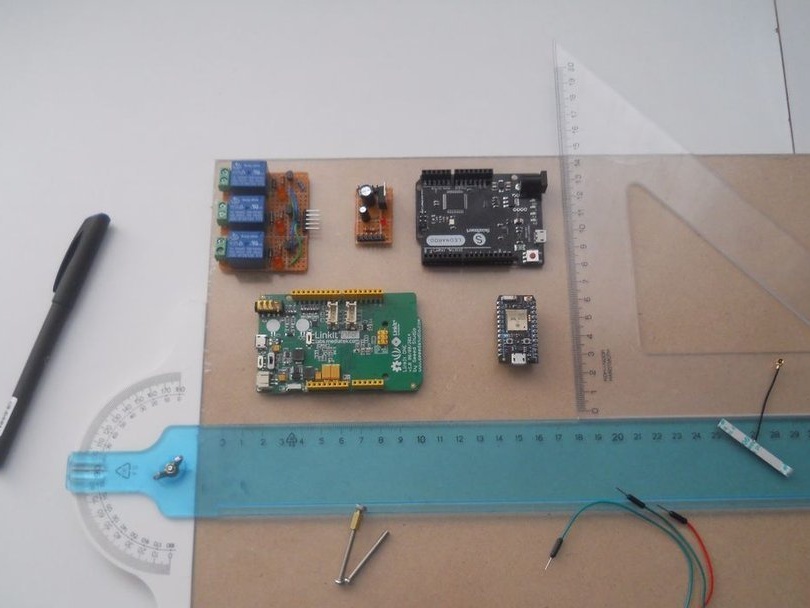
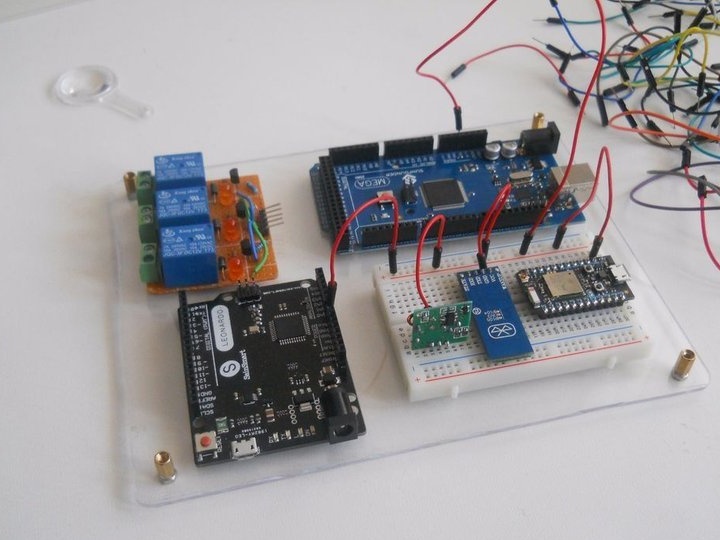
Kad šis projektas būtų įgyvendintas, buvo naudojami keturi mikrovaldikliai: Arduino „Mega“, Arduino Leonardo, UNO ir „Dalelių fotonas“. „Mega“ yra projekto smegenys, kurios priima signalus iš laisvų rankų įrangos, analizuoja ir siunčia komandas kitiems įrenginiams. Perduoda visus duomenis „Particle Photon“, kuris sukuria interneto serverį. „Leonardo“ valdo pelę asmeniniame kompiuteryje, o „Uno“ naudojama IR (infraraudonųjų spindulių signalams) priimti ir robotui valdyti. Įrenginys gali valdyti tris skirtingus įrenginius (arba daugiau, jei norite programuoti ką nors kita). Be to, šie trys skirtingi įrenginiai bus vadinami kanalais. Įrenginys perjungia šiuos kanalus, jei užmerki akis:
Užmerkite akis 1–2 sekundėms: perjunkite į namų automatikos funkciją
Užmerkite akis 2–4 sekundėms: perjunkite į roboto valdiklio režimą
Užmerkite akis 1-6 sekundėms: pereina į pelės valdiklio režimą
Norėdami atlikti namų automatizavimo funkciją, prie kurios galite prijungti bet ką: buvo naudojamas televizorius, lemputės, lizdai, viskas, ko norite, relės
Smegenų bangų suvokimui - „Necomimi“, kuris gali judinti ausis priklausomai nuo jūsų smegenų bangų (dėmesys, meditacija). Viduje mažos mikroschemos, kuri skaito smegenų bangas, filtruoja triukšmą ir suteikia labai gerą signalą. Jis veikia su UART (serijine) sąsaja, todėl kai kuriuos įsilaužimus galime naudoti Arduino skaitydami smegenų bangas.Šios laisvų rankų įrangos užduotis yra belaidžiu būdu perduoti smegenų bangas į centrinį serverį.
Jei jau esate pažįstami ankstesnis projektastada galėsite praleisti „Necomimi“ išmontavimo ir rekonstravimo etapą.
Eik žemyn pažiūrėkite, kaip išardyti ir iš jo pasidaryti belaidę „Bluetooth“ laisvų rankų įrangą.
Namų automatikos valdymo sistema
Jei perjungiate į namų automatikos režimą, padidinkite savo dėmesio lygį virš 70, kad įjungtumėte pirmąją relę, padidinkite savo meditacijos lygį virš 70, kad įjungtumėte antrąją relę, ir padidinkite abi reikšmes aukščiau 70, kad įjungtumėte trečiąją relę. Tai šiek tiek sunku, bet ne neįmanoma po tam tikro proto lavinimo. Jei relė jau įjungta, naudokite tą pačią komandą, kad ją išjungtumėte (jei ji įjungta, pasiekite 70, kad ją išjungtumėte). Kai sistema yra paruošta, bet kurį aukštos įtampos įrenginį (šviesą, televizorių, kompiuterį, ventiliatorių ir bet ką) galima prijungti prie relės modulio.
Pelės valdymas
Žymeklį kontroliuoja emocijos. Jei dėmesio lygis yra mažesnis nei 25, jis juda į kairę, jei nuo 25 iki 50 - juda į dešinę, jei nuo 50 iki 75 - kyla, o jei nuo 75 iki 100 - mažėja. Padidindami meditacijos lygį, galite spustelėti pelės mygtuką. Aišku, tam reikia treniruotis.
Roboto valdymas
Robotas turi tik tris skirtingas komandas: sustokite, pasukite į kairę ir judėkite pirmyn. Kodėl tik du judesio variantai? Nes šių dviejų krypčių pakanka, kad robotas būtų perkeltas bet kur. Pasukite su robotu naudodamiesi savo meditacijos lygiu, o pasiekę norimą judėti kryptį, sustabdykite robotą, tada judėkite į priekį, atkreipdami dėmesį. Tai yra geriausias būdas valdyti robotą, ir net pradedantieji, kurie negali taip gerai kontroliuoti savo dėmesio / meditacijos verčių, gali žaisti su šiuo robotu.
Ausinės perduoda BT („Bluetooth“) signalus „Arduino Mega“, kuris analizuoja gaunamus baitus ir, atsižvelgdamas į vartotojo mintis, valdo įvairias funkcijas. Iš pradžių autorius norėjo naudoti „Dalelių fotoną“ kaip duomenų siųstuvą, tačiau šis mažas modulis įgijo vaidmenį kuriant interneto serverį. Tai buvo didžiausia viso projekto modifikacija. Jis taip pat naudojo namuose gaminamus „Arduino“ modulius, tačiau šiuos modulius galite įsigyti internetu.
Visos dalys yra iš GearBest.com. Tai internetinė parduotuvė, tokia pati kaip ir „eBay“, tačiau atsarginės dalys pristatomos daug greičiau (galbūt visa tai yra aliexpress). Todėl, jei norite sukurti savo žaidimų valdiklį, roboto valdiklį ar „Force Detecto r“, pradėkite pirkdami dalis.






Reikalingi įrankiai:
lituoklis
lydmetalis
klijų pistoletas
lipni juosta / dvipusė juosta
vielos nuėmiklis
vielos pjaustytuvai
Įranga
/ Arduino Nano
Programinė įranga:
„Necomimi“ įsilaužimas







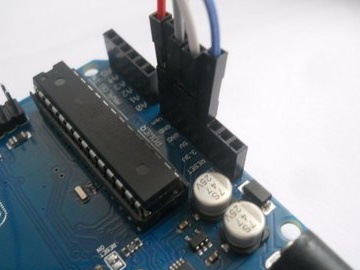
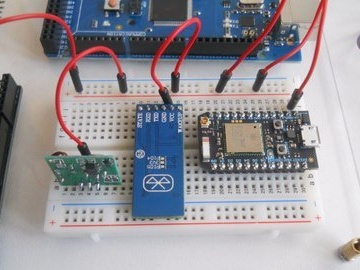
Mes norime pakeisti šį EEG žaislą duomenų perdavimui per „Bluetooth“, todėl pirmiausia išardysime dėklą. Varžtai yra po lipduku. Nuimkite lipduką ir prietaiso užpakalinę dalį, o viduje rasite mažų lentų. Po pagrindine lenta yra „Neurosky TGAM“ lustas. 4 laidai nuo pagrindinės mikrovaldiklio plokštės prie jo yra lituojami, todėl pasiimkite lituoklį ir atsargiai ištraukite šią grandinę. Dabar prijunkite tris laidus prie GND kaiščio, prie VCC kaiščio ir prie T kaiščio. T-pin yra siųstuvo išėjimas, kurio greitis yra 57600 baudų, kuris siunčia duomenų paketus į mūsų mikrovaldiklį. Išlydę tris aukščiau esančius laidus, galite susikurti savo įkraunamą energijos šaltinį. Autorius naudoja 500 mAh ličio jonų akumuliatorių, USB įkroviklio grandinę, 5 V padidinimo grandinę ir du rezistorius (100 omų ir 200 omų), kad pateiktų atskirą 3,4 V maitinimo lustą ir „Bluetooth“ modulį. Nuotraukoje ryšio schema.
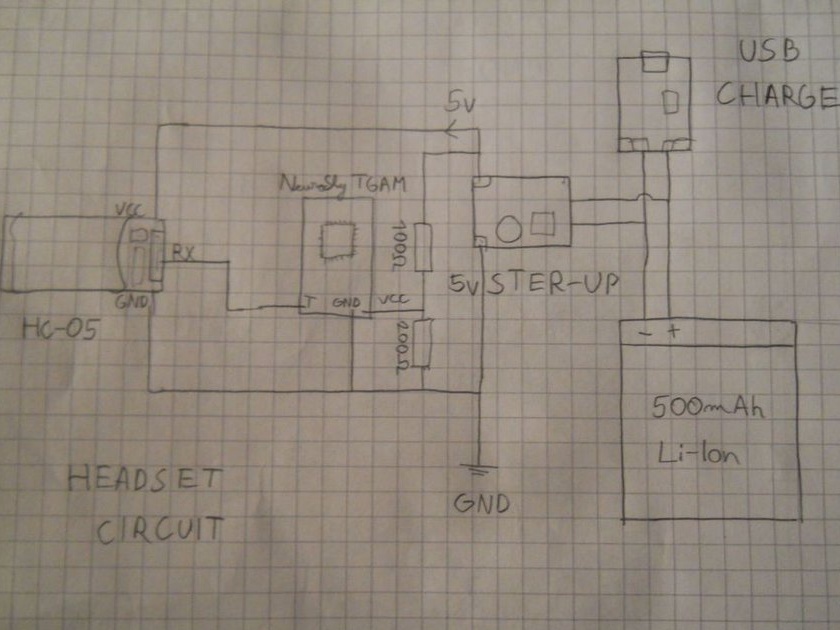
Jei grandinė paruošta, sukonfigūruokite „Bluetooth“ modulį.
Vykdykite žemiau pateiktas instrukcijas ir paveikslėlius ir sukurkite savo belaidės EEG ausinės.
Svarbiausia yra „T“ kaištį prijungti prie „RX“ „Bluetooth“ modulyje.



HC-06: Pirmiausia įkelkite eskizą pavadinimu „HC_06_Bluetooth“ į „Arduino UNO“, tada prijunkite „Bluetooth“ modulį, kaip parodyta diagramoje.
// HC-06-Bluetooth
negaliojanti sąranka () {
// Pradėkite aparatinės įrangos seriją.
„Serial.begin“ (9600); // numatytasis HC-06 perdavimo greitis
vėlavimas (1000);
Serial.print („AT“);
vėlavimas (1000);
„Serial.print“ („AT + VERSIJA“);
vėlavimas (1000);
„Serial.print“ („AT + PIN“); // norint pašalinti slaptažodį
vėlavimas (1000);
Serial.print („AT + BAUD7“); // Nustatykite duomenų perdavimo spartą į 576000 - pvz., „Necomimi“
vėlavimas (1000);
Serialas.beginas (57600); //
vėlavimas (1000);
}
tuščia kilpa () {
}Atidarykite serijinį monitorių „Arduino IDE“ ir palaukite, kol „Arduino“ sukonfigūruos „BT“ modulį. Jūsų „Bluetooth“ modulis dabar yra nustatytas 57600 baudų. Galite išbandyti daugybę BCI („Brain Computer Interface“) programų, nes šis nulaužtas „Necomimi“ žaislas bus suderinamas su visomis „Neurosky“ programomis.
Šias programas galite naudoti norėdami išmokti valdyti savo smegenų bangas.
HC-05: Tada naudokite „HC_05_Bluetooth“ ir įkelkite „Arduino“ taip, kaip anksčiau.
// HC-06-Bluetooth
negaliojanti sąranka () {
// Pradėkite aparatinės įrangos seriją.
„Serial.begin“ (9600); // numatytasis HC-05 duomenų perdavimo sparta
vėlavimas (1000);
Serial.print („AT“);
vėlavimas (1000);
„Serial.print“ („AT + VERSIJA“);
vėlavimas (1000);
„Serial.println“ („AT + ROLE = 1“); // nustatykite HC-05 į pagrindinį režimą
vėlavimas (1000);
Serial.println ("AT + LINK =" Čia įveskite savo adresą "); // dabar modulis turėtų automatiškai subręsti
vėlavimas (1000);
„Serial.print“ („AT + UART = 57600,1,0“); // Nustatykite perdavimo greitį 576000
Serialas.beginas (57600); //
vėlavimas (1000);
}
tuščia kilpa () {}
Prijunkite HC-05 „EN“ kaištį prie „3v3 Arduino“. Kode turite įrašyti savo HC-06 modulio adresą. Patikrinkite „BT“ modulio adresą „Android“ išmaniajame telefone. Kodelyje „:“ (dvigubi taškai) pakeiskite kableliais „,“.
Ir jūs turite pakeisti adresą kode: 20: 15: 09: 15: 17: 82 = 2015.09.151782 Taigi, „HC-05“ modulis gali atpažinti adresą.
Nuotolinio valdymo pultas
Norėdami sukurti šį nebrangų robotą, buvo naudojamas 38 kHz infraraudonųjų spindulių jutiklis, kuris naudojamas televizijos nuotolinio valdymo pultuose.
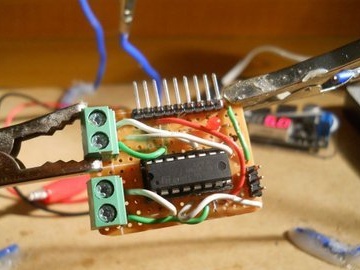
Variklio vairuotojas
Variklio pavaros schema - jums reikės šios informacijos:
2 sraigtiniai gnybtai
L293D IC3
Antraštės kaištis (90 laipsnių)
1k rezistorius
Raudonas šviesos diodas
Laidai
Grandinės plokštė
Naudodamiesi keliais variniais laidais ir, vadovaudamiesi schema, prijunkite mikro grandinės kaiščius prie jungties kaiščių. Nesvarbu, prie kurios jungties kištuko pritvirtinta mikroschema, tik atsiminkite, kur juos prijungėte. Šviesos diodas yra sujungtas nuosekliai su rezistoriumi ir lygiagrečiai su 5 V įtampos įtampu.
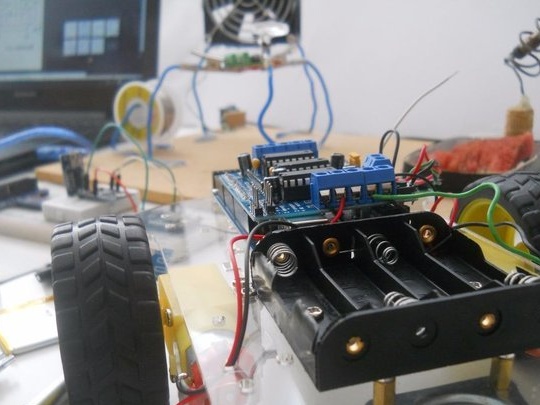
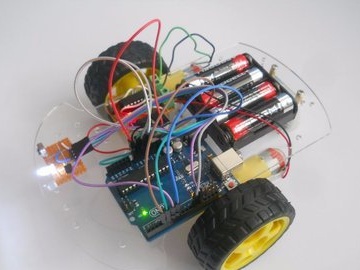
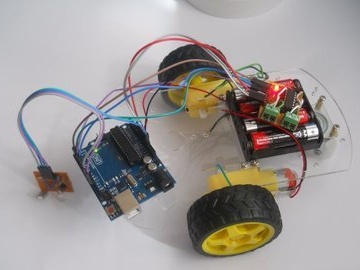
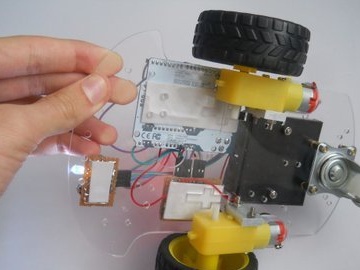
važiuoklės surinkimas
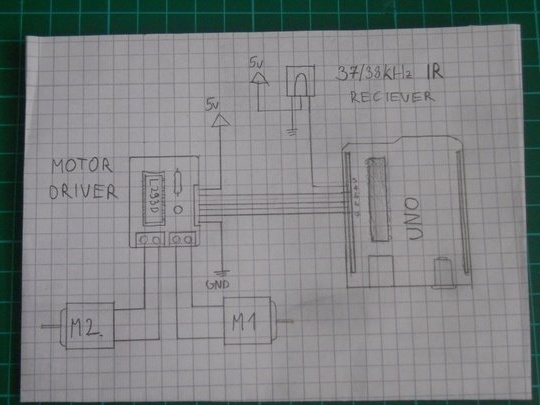
Kaip elektrinio variklio vairuotojas naudojamas L293D lustas, kuris gali valdyti du variklius. Norėdami sudaryti diagramą, pažiūrėkite į schemą.
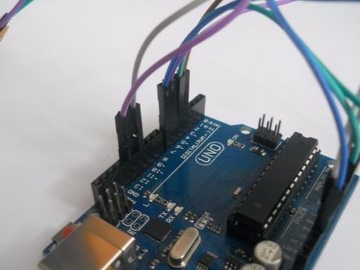
Prijunkite dalis prie Arduino
Arduino smeigtukas == & gt; variklio vairuotojas
4 == & gt; 15
5 == & gt; 10
6 == & gt; 7
7 == & gt; 2
VIN == & gt; 85v == & gt; 1, 9, 16
GND == & gt; 4, 5, 13, 12
Taigi, pažiūrėkite į L293D modulio grandinės schemą, tada prijunkite jo kontaktus prie Arduino UNO, kaip aprašyta aukščiau. 5v kaištis Arduino turi būti prijungtas prie 1, 9, 16 kaiščių, kad būtų galima įjungti lusto variklio valdymo funkciją. Tada galiausiai varikliams įjungti naudokite varžtų gnybtus.
Biblioteka naudoja IRremote, kodą, kuris nuskaito 38 kHz infraraudonųjų spindulių signalus, juos iššifruoja ir tada perkelia robotą. (Atsisiųskite biblioteką skyriuje „programinė įranga“).
Kode yra komentarų, bet esmė ta, kad jis dekoduoja IR signalus, gaunamus iš pagrindinio serverio, tada, priklausomai nuo to, ko vartotojas nori, įjungia variklius, po kurių robotas juda į priekį arba pasisuka į kairę. Atsisiųskite kodą: „Robot_Code“. Atsisiųskite tai į savo „Arduino“ ir jūsų robotas bus paruoštas.
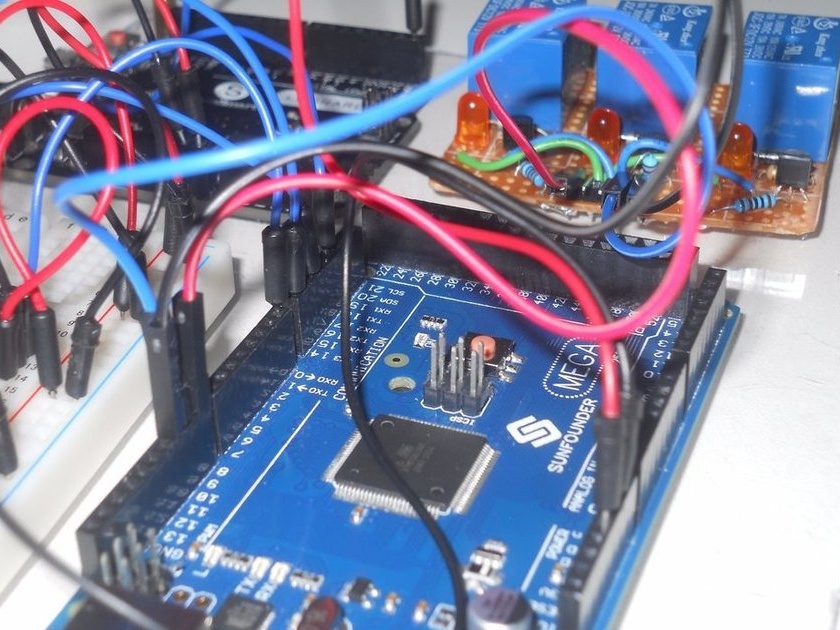
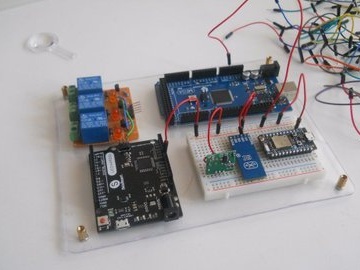
Pagrindinis serveris („Arduino Mega“, „Leonardo“, „Photon“)




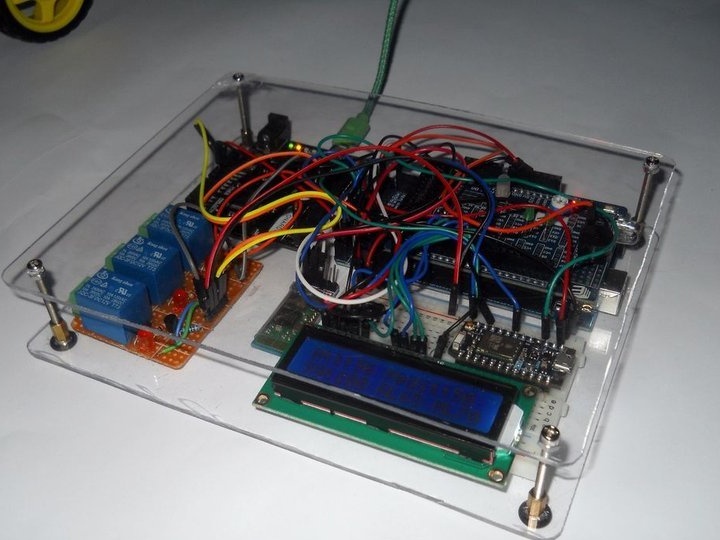
Serveris nuskaito gaunamus duomenų paketus iš belaidės laisvų rankų įrangos. Mes naudosime sukonfigūruotą BT modulį ryšiui tarp laisvų rankų įrangos ir serverio palaikyti. „Arduino Mega“ yra visos grandinės smegenys, viskas yra prijungta prie šio mikrovaldiklio: „Bluetooth“, infraraudonųjų spindulių siųstuvo šviesos diodas, interneto serveris ir pelės valdiklis. Kodas yra šiek tiek sudėtingas, tačiau paprastai jame yra komentarų, kuriuos reikia suprasti.
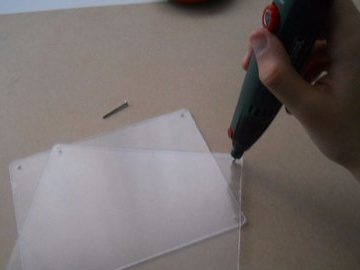
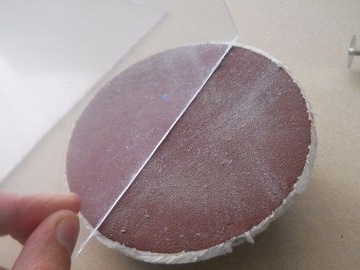
Būstas
Viskas paprasta. Dvi 18x15 cm storio stiklo plokštės, kraštus išlyginkite švitriniu popieriumi. Keli varžtai, kad būtų galima juos sujungti vienas su kitu.
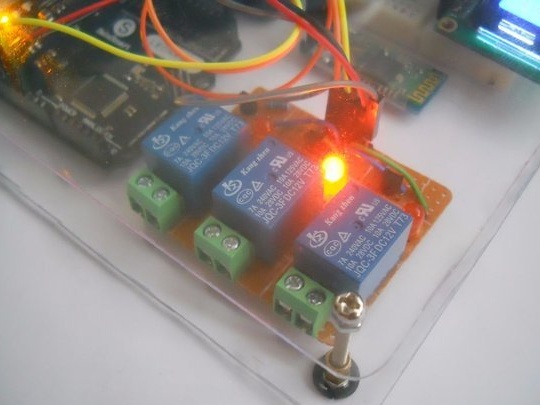
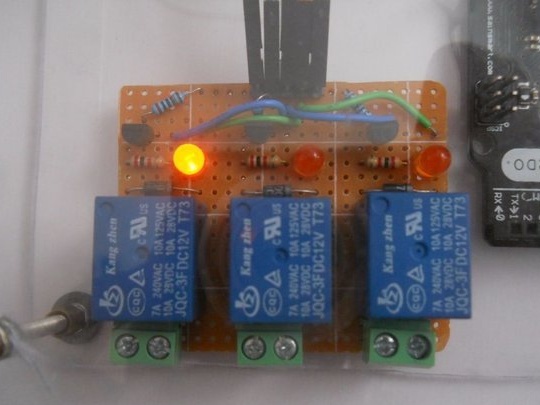
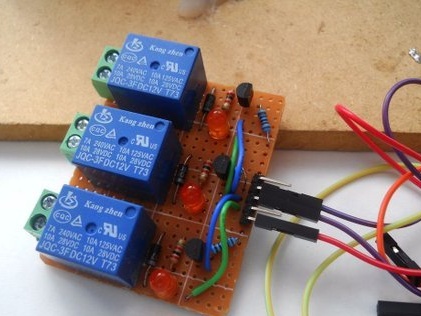
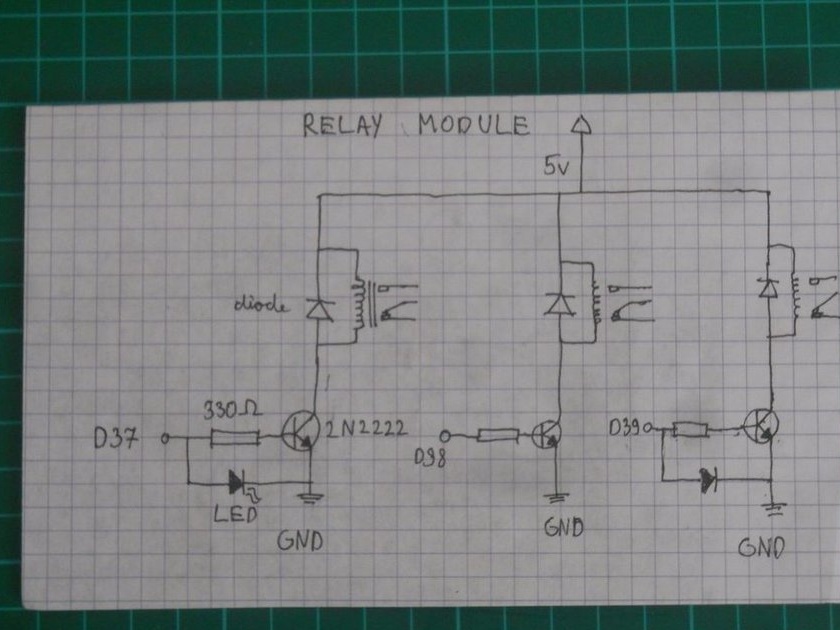
Relės lenta
Jums reikės šios informacijos:
2n2222 tranzistorius (3 vnt.)
germanio diodai (3 vnt.)
330 omų varžai (3 vnt.)
1 kOhm varžai (3 vnt.)
5 V relė (3 vnt.)
kaištinės jungtys
Grandinės plokštė
Paveikslėlis yra vertas daugiau nei tūkstančio žodžių, todėl pažiūrėkite į schemą, kaip sujungti dalis ant spausdintinės plokštės.
Jei „Signalo“ išėjimas yra iš „Arduino“, relė įsijungs. Tranzistorius sustiprina signalą, kad suteiktų pakankamą relės galią. Mes naudosime 37-38-39 kontaktus, kad kontroliuotume aukštą žemą kiekvienos relės lygį.
Norėdami sumontuoti detales ant plexiglass korpuso, autorius naudojo dvipusę juostą. Jis beveik išlaiko detales.
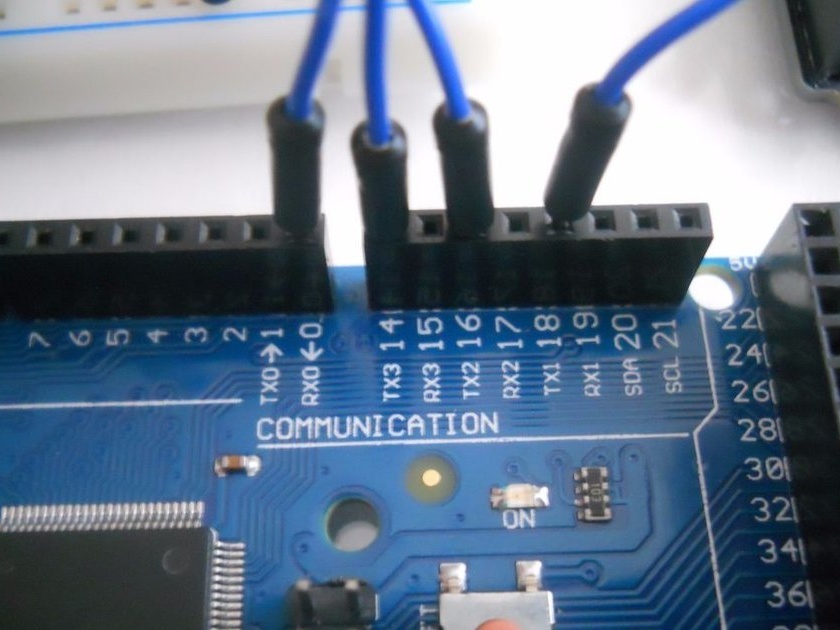
Tai yra programinės įrangos serveris, todėl sudaryti grandinę nėra taip sunku. Jums tiesiog reikia įjungti mikrovaldiklius ir užmegzti ryšį tarp jų. IR šviesos diodas yra prijungtas prie D3 kaiščio, o relė - prie 37-38-39. „D16 Arduino Mega“ keliauja į „RX Photon“, o D18 - į „RX Leonardo“.
Roboto jungtis
[2,02 Kb] (atsisiuntimų: 14)
Bet dabar kodas yra paruoštas ir veikia, todėl jums tereikia atsisiųsti savo mikrovaldiklius. Atsisiųskite .ino failą arba nukopijuokite / įklijuokite kodą į savo IDE ir naudokite jį. „Dalelių fotono“ kodą reikia atsisiųsti per naršyklės IDE. Norėdami tai padaryti, prisiregistruokite. Prijunkite nešiojamąjį kompiuterį prie savo mikrovaldiklio. Viskas vyksta beveik automatiškai, tiesiog pridėkite savo įrenginio ID.
Prieš atsisiųsdami kodus, įsitikinkite, kad niekas nėra prijungtas prie RX / TX kontaktų. Taigi atjunkite „Bluetooth“ modulį nuo „Mega“, o „Mega“ - nuo „Leonardo“ ir „Photon“.
[489 b] (atsisiuntimų: 15)

Žiniatinklio serverisNorėdami į savo projektą įtraukti daiktų internetą (daiktų internetą), autorius sukūrė internetinį duomenų kaupiklį naudodamas „Dalelių fotoną“. Atsižvelgiant į tai, ką darote su įrenginiu, „Photon“ sukuria asmeninį serverį ir įrašo duomenis į debesį.Iš pradžių tai gali atrodyti bauginanti, tačiau įsivaizduokite, kad galite nustatyti, ar patiriate stresą (dėmesio lygis greitai didėja ir mažėja) ar verta miegoti
(meditacijos lygis visada aukštesnis nei 80)
. Šis interneto serveris gali padėti jums gyventi sveikiau.
Naršyklės kodavimas
„Dalelė“ taip pat turi internetinę skydą, kurioje galite paskelbti bet kokius duomenis naudodami „Particle.publish ();“ sintaksė. Įrankių juostos kūrėjai sutaupė daug laiko vartotojams.
