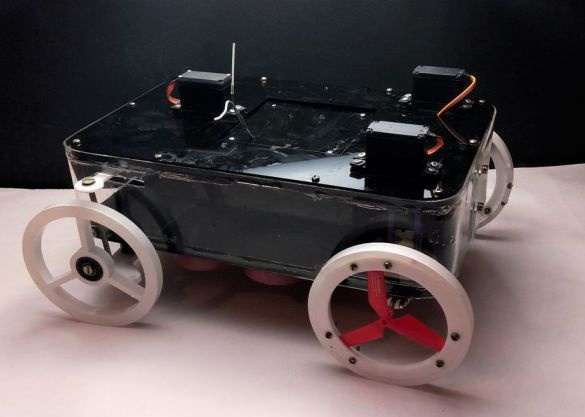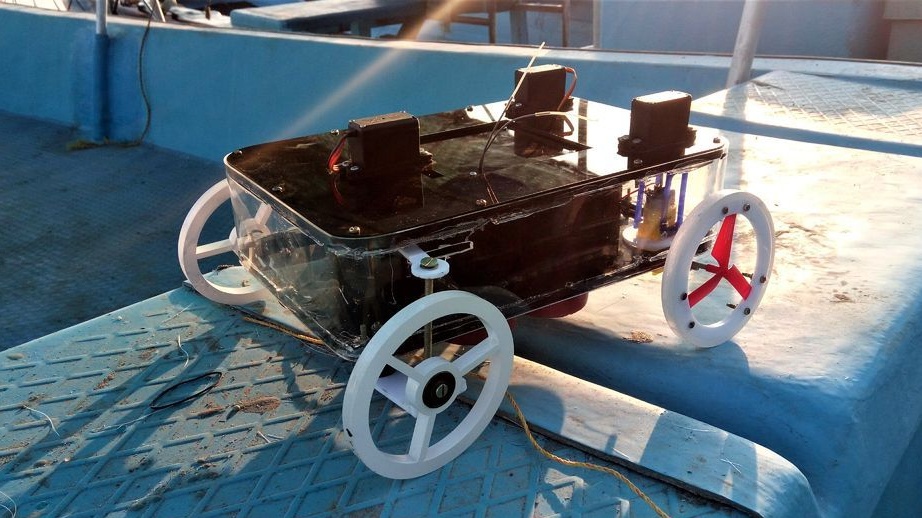



Šiame straipsnyje mes apsvarstysime, kaip Indijos amatininkai gamina visureigį, naudojamą tiek sausumoje, tiek vandenyje. Visureigė susideda iš plaukiojančios platformos su ratukais ir oro sraigto. Mechanizmai valdomi nuotoliniu būdu per Arduino UNO.
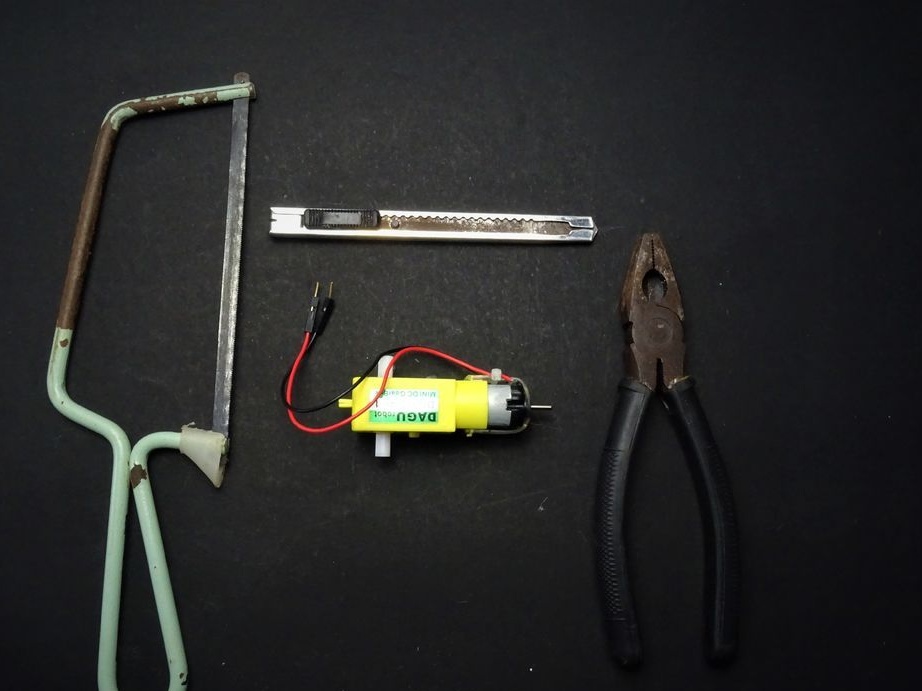
Įrankiai ir medžiagos:
-
-AKB 9V;
-Susijimas;
-Akrilo;
-Fanera;
(atsižvelgiant į tai, guolis yra 8 x 16 x 5 mm, autorius nurodo 8 * 22 mm)
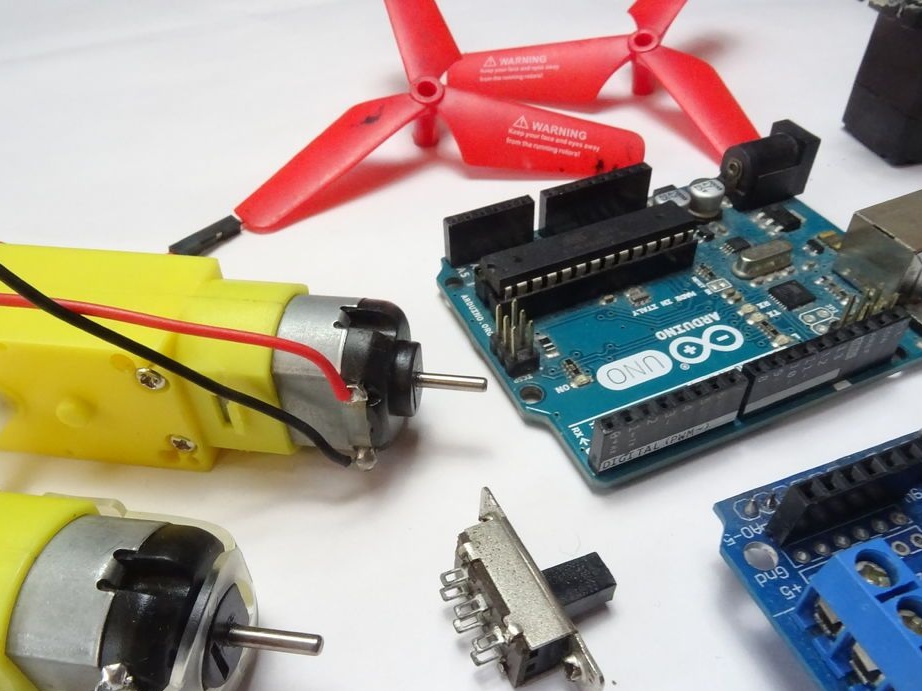
-Dvieji oro sraigtai;
-Tvirtinimo detalės;
-Plūdžiai;
-Klimo pistoletas;
-Super klijai;
Epoksidinė derva;
-Lituoklis;
-Gręžimas;
-Lazerio pjaustytuvas;
-Sauga;
- atsuktuvas;
-Gręžimas;
-Lituoklis;
-Lentas;
-Kompiuteris su programine įranga;


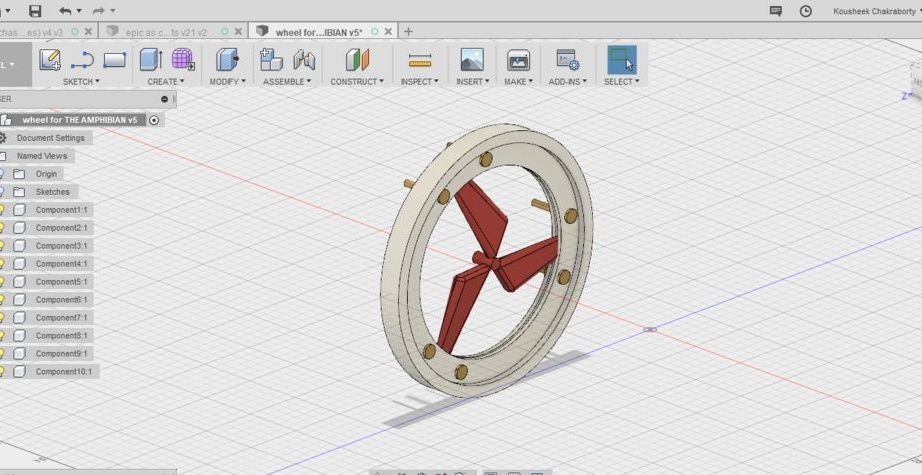
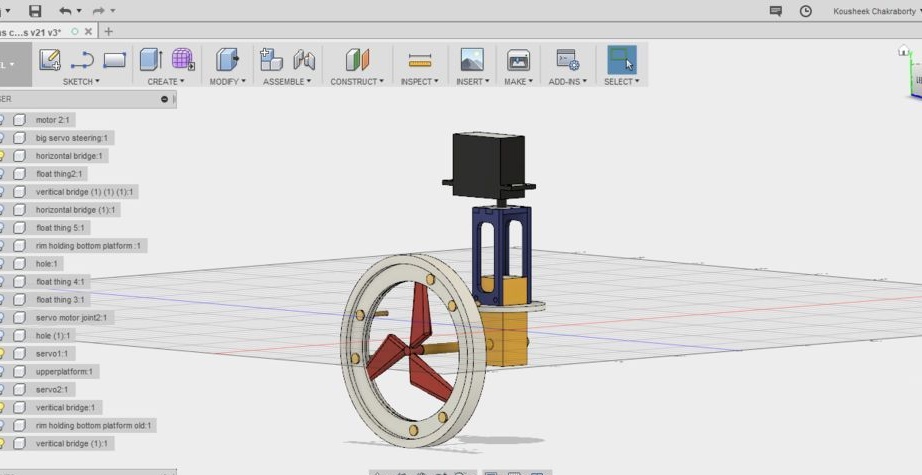
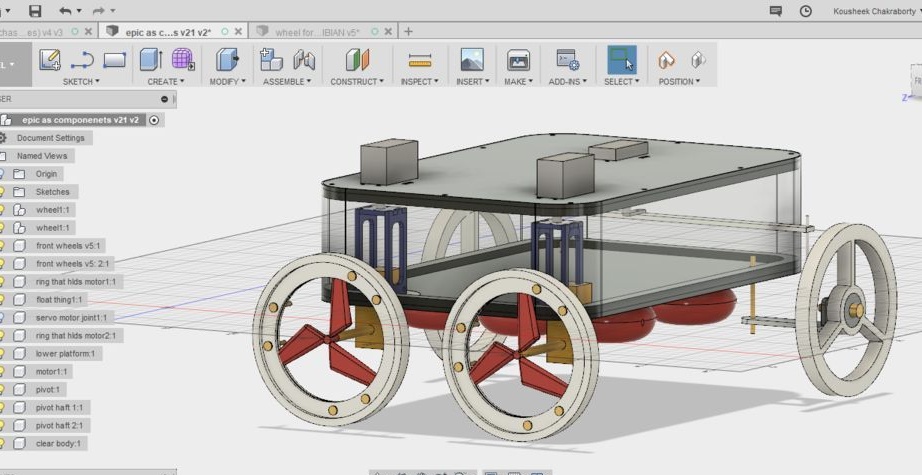
Pirmas žingsnis: dizainas
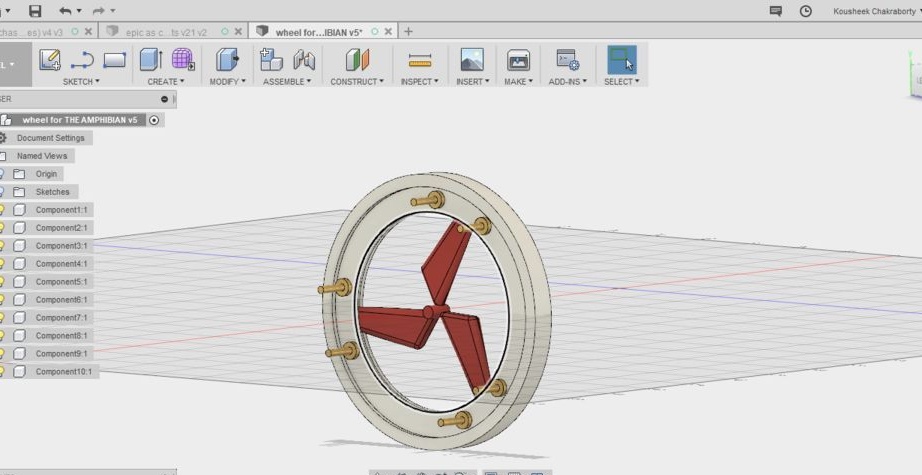
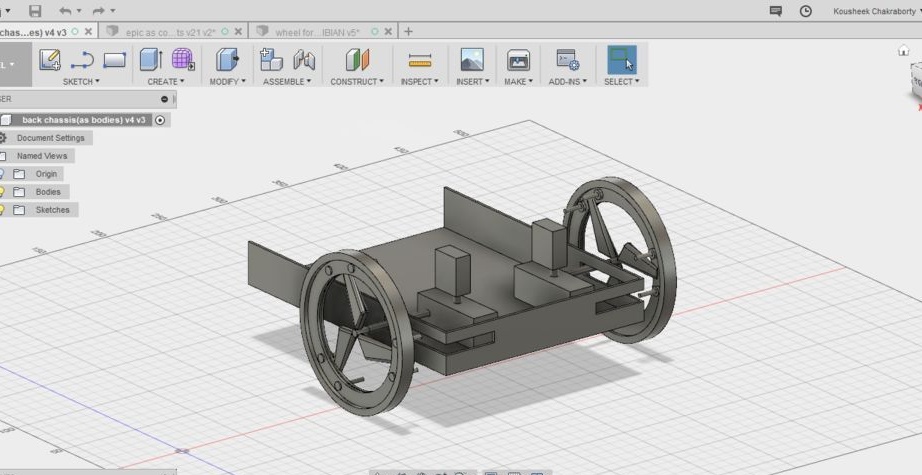
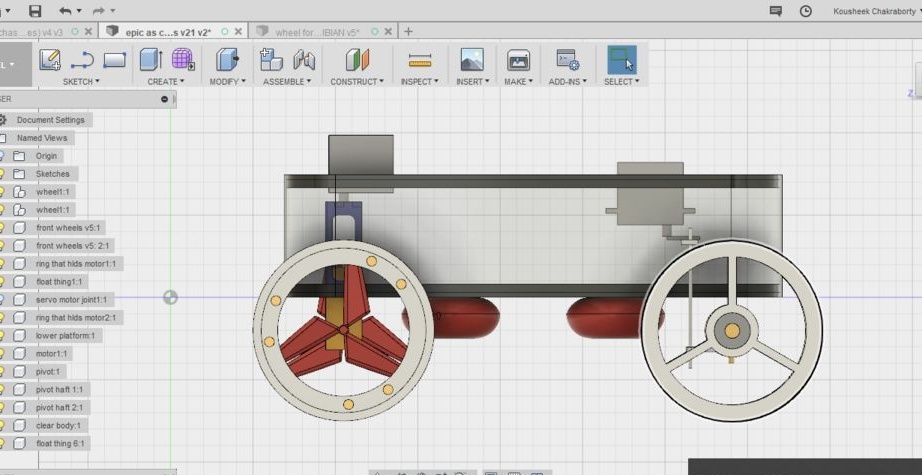
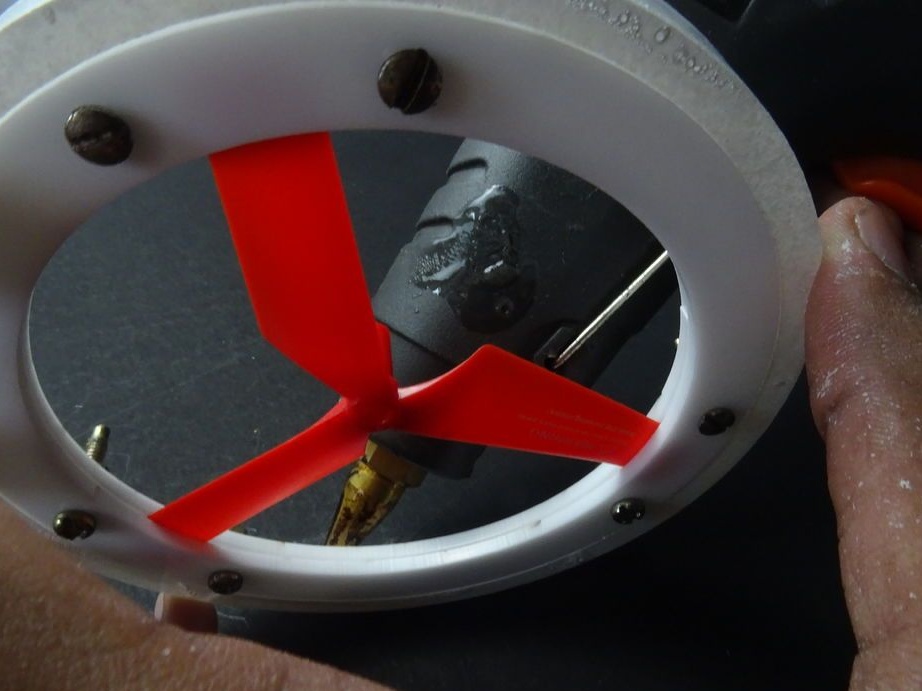
Norėdami sukurti projektą, meistrai pasinaudojo „Fusion 360“ programa, kurios metu buvo sunku suderinti judėjimą sausumoje ir vandenyje. Projektuodami ratus, meistrai sukūrė sistemą, kurioje varžtai atsidarytų vandenyje, tačiau, atsižvelgiant į konstrukcijos sudėtingumą, rato viduje jie tiesiog integravo sraigtus iš vaikų žaislo. Tai leidžia ratams judėti visureigiu sausumoje, o kai jie patenka į vandenį, varžtai yra įjungiami.
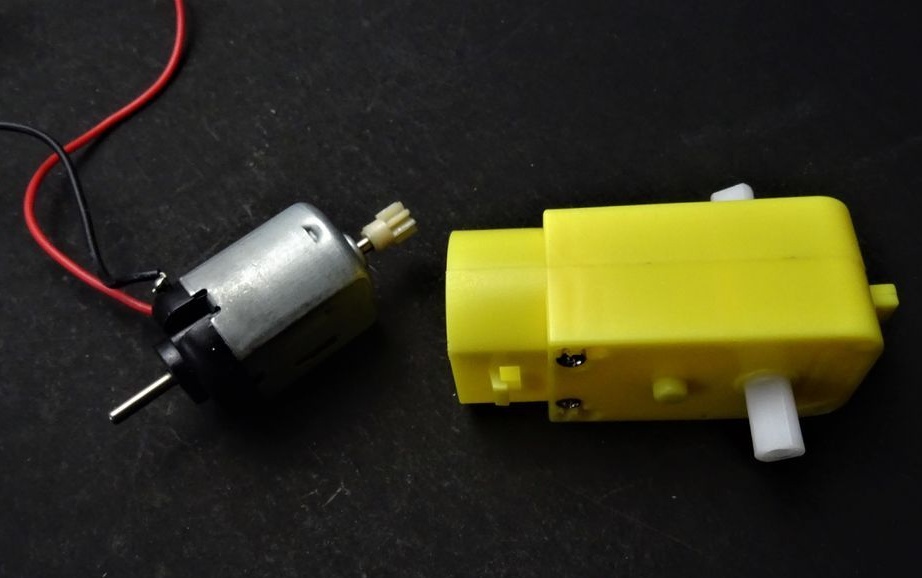
Norėdami įgyvendinti šią idėją, važiuodami vandeniu turite mokėti pasukti galinius ratus statmenai visureigiui. Tai tapo įmanoma, kai variklio pavaros buvo išimtos iš rėmo. Plastikinės greičių dėžės ir į jas patenkantis vanduo nepadarys žalos.
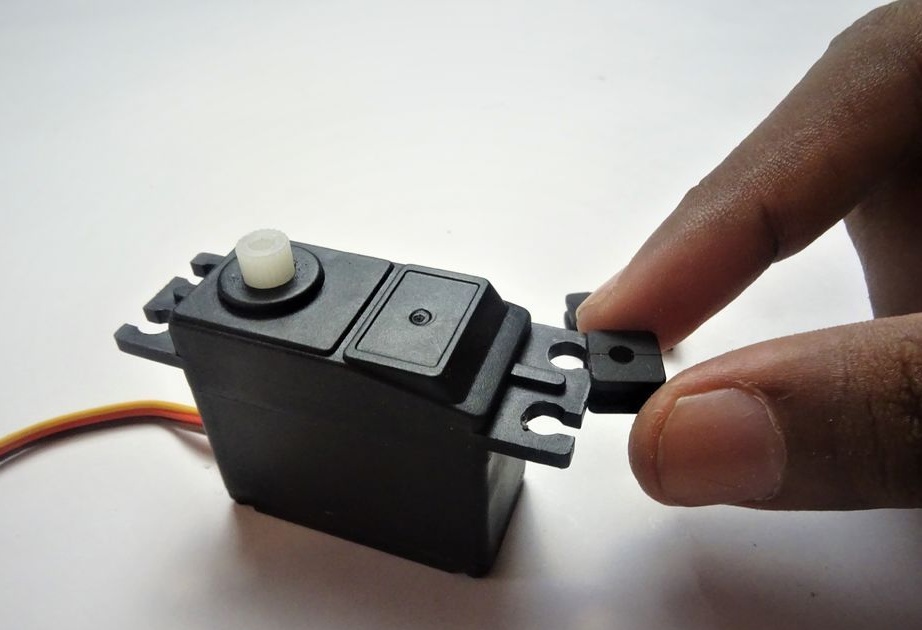
Varžtų pasukimas bus atliekamas naudojant servovarą.
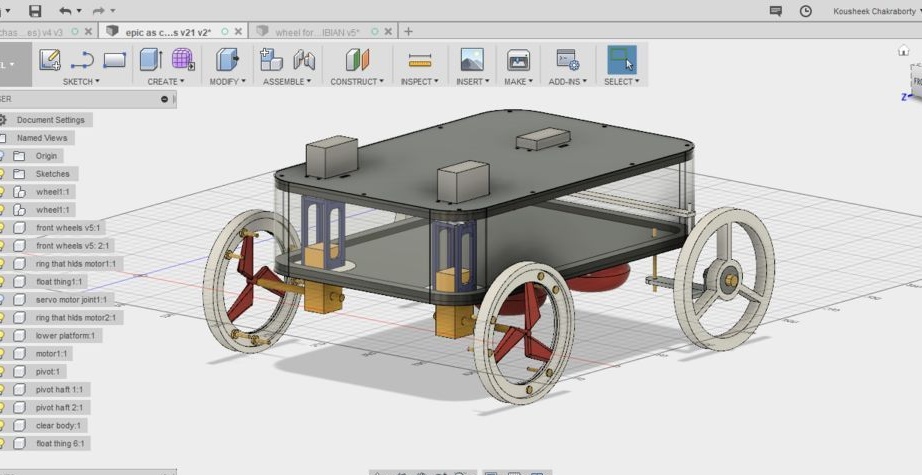
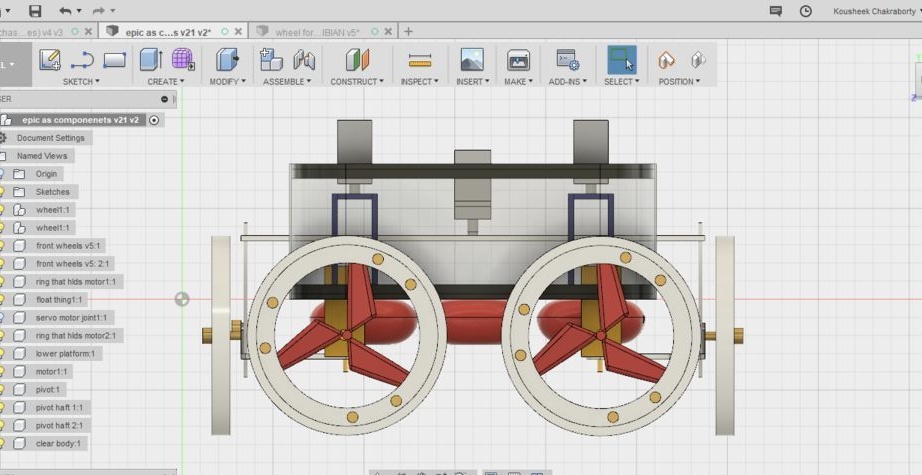
Visureigis turi du posūkio mechanizmus. Vienas, skirtas valdyti vandenyje esančius sraigtų galinius ratus, o antrasis - važiuoti sausuma, kontroliuoja priekinius ratus. Priekinių ratų sukimosi kampas yra 35 laipsniai, o tai leidžia daryti staigius posūkius.
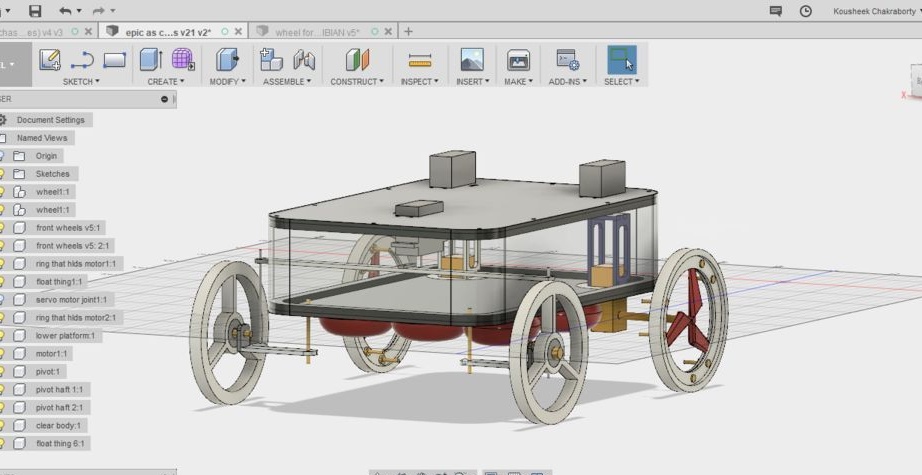
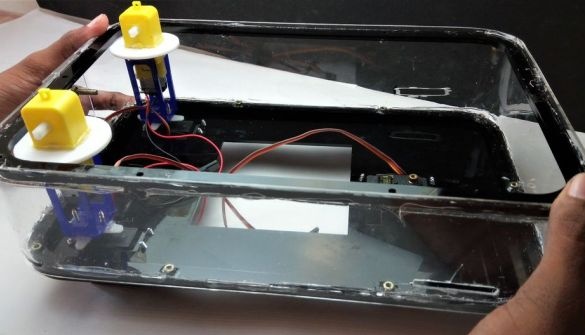
Žemiau esančiose nuotraukose galite pamatyti visureigio transformaciją judant sausuma ir vandeniu.
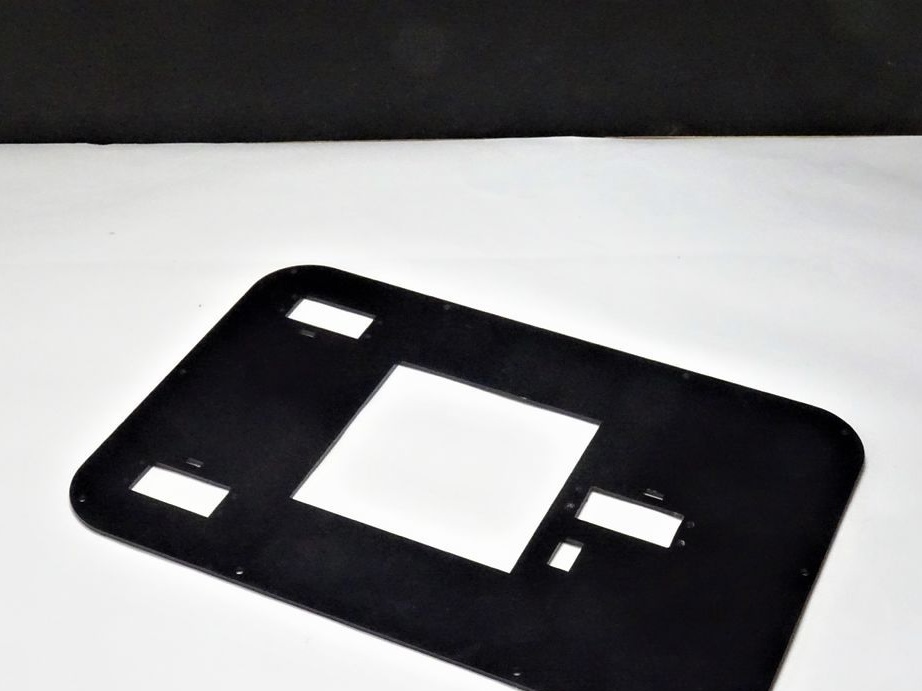
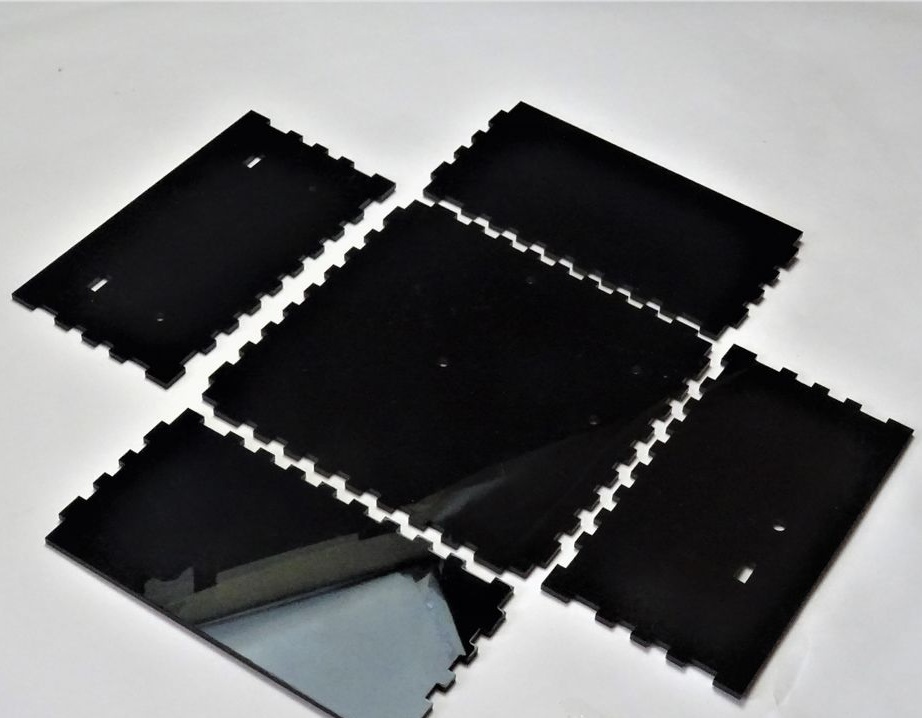
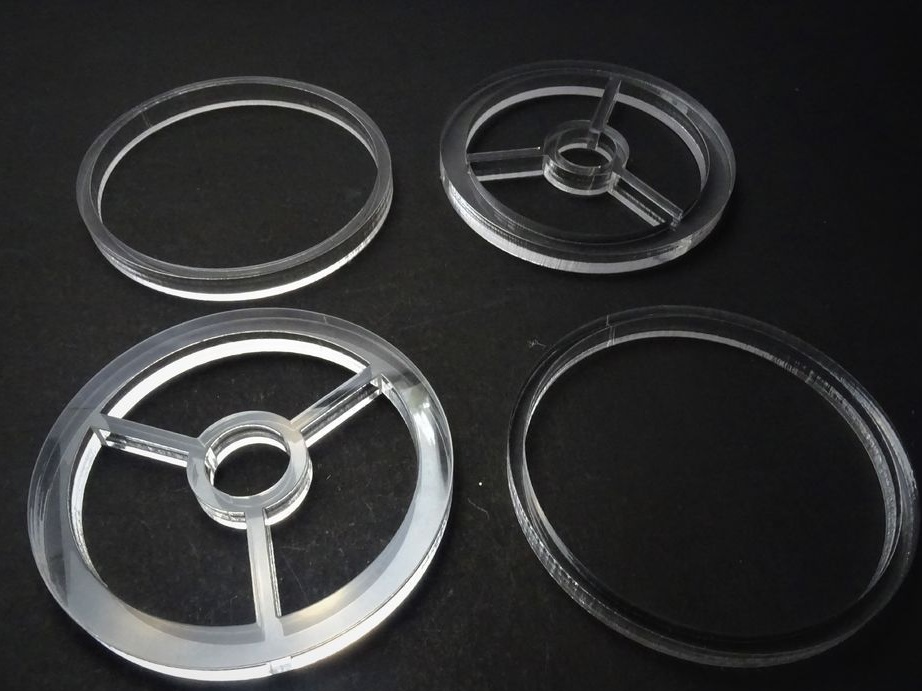
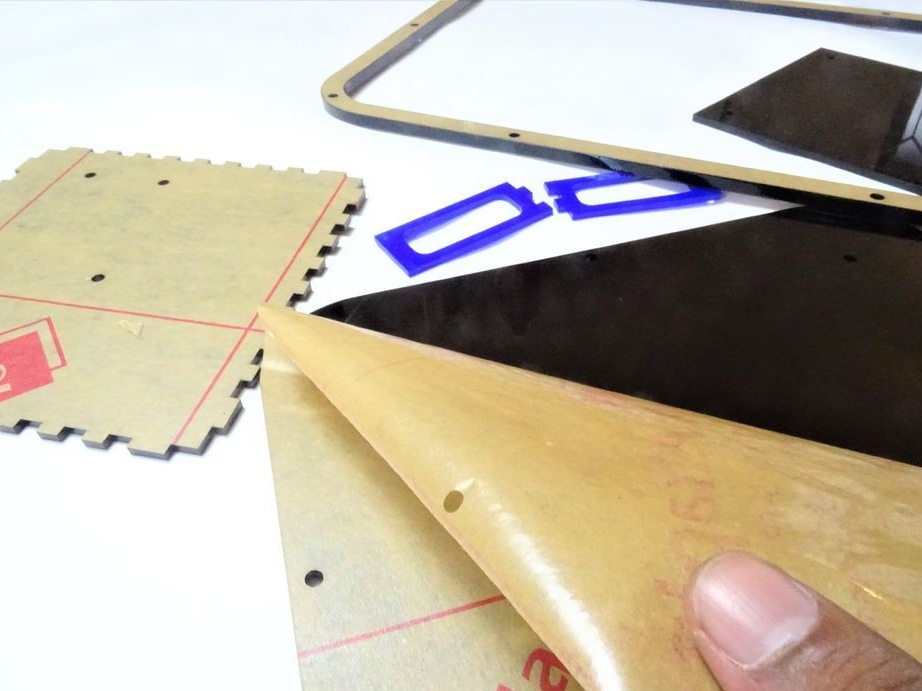
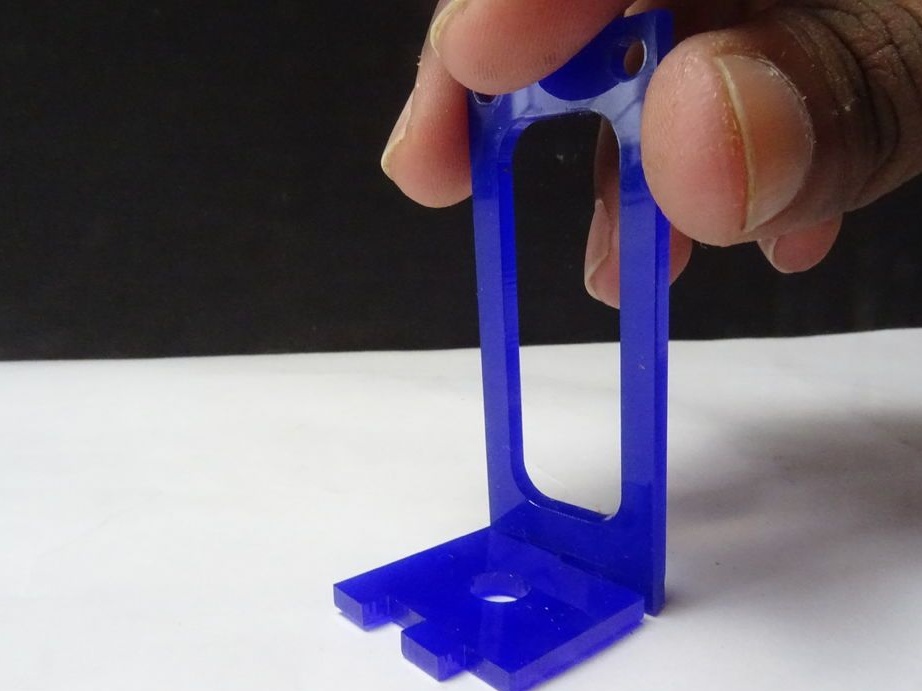
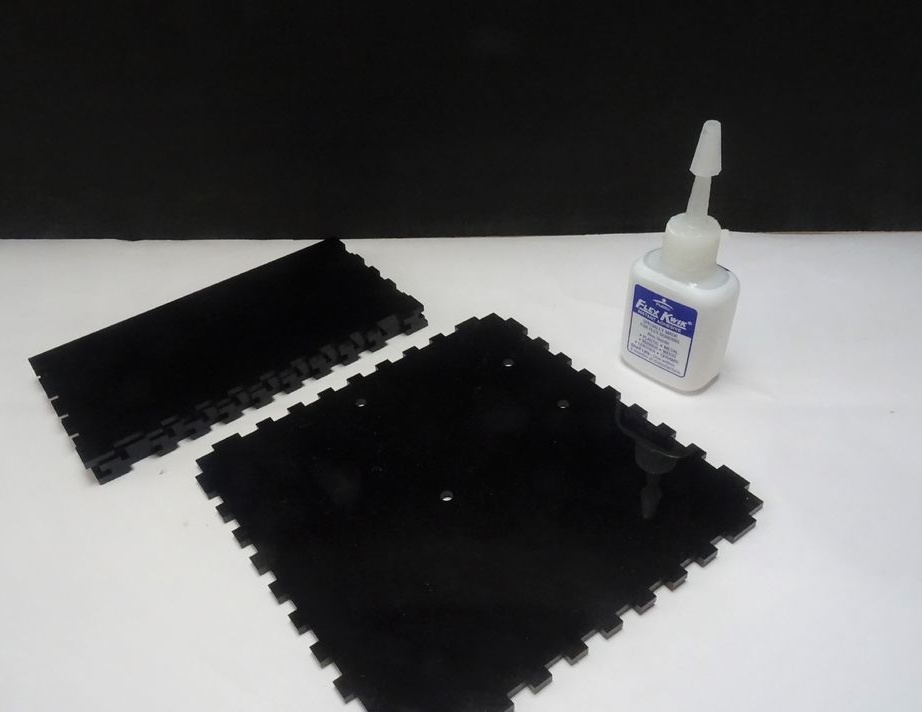
Antras žingsnis: Pjovimas lazeriu
Visureigiui kapitonas naudojo skirtingo storio ir spalvos akrilą.
Juodas viršutinis sluoksnis 3 mm x 1
Apatinis sluoksnis juodas 3 mm x 1
Juodas šoninis rėmas 5 mm x 2
Šoninė siena permatoma 2 mm x 1
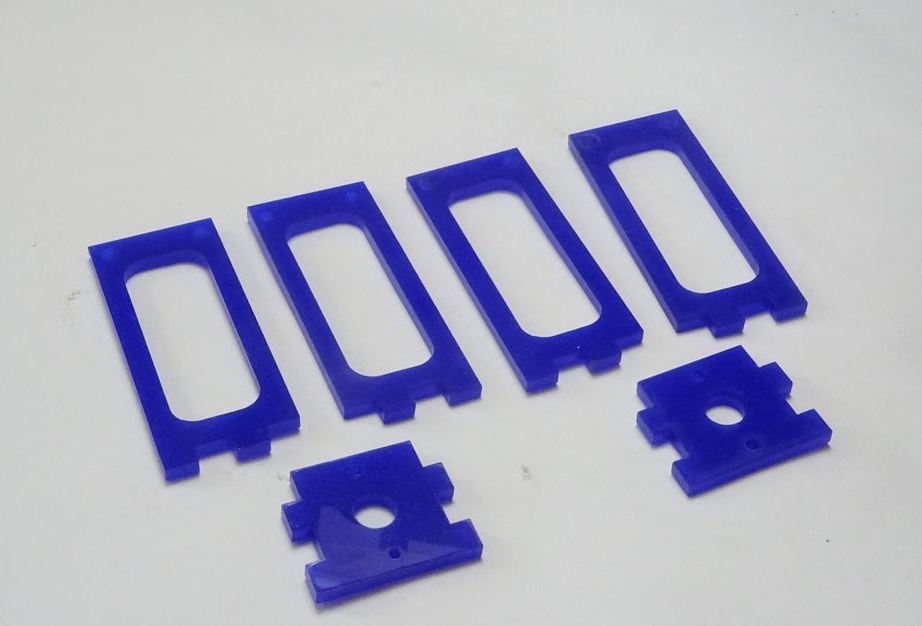
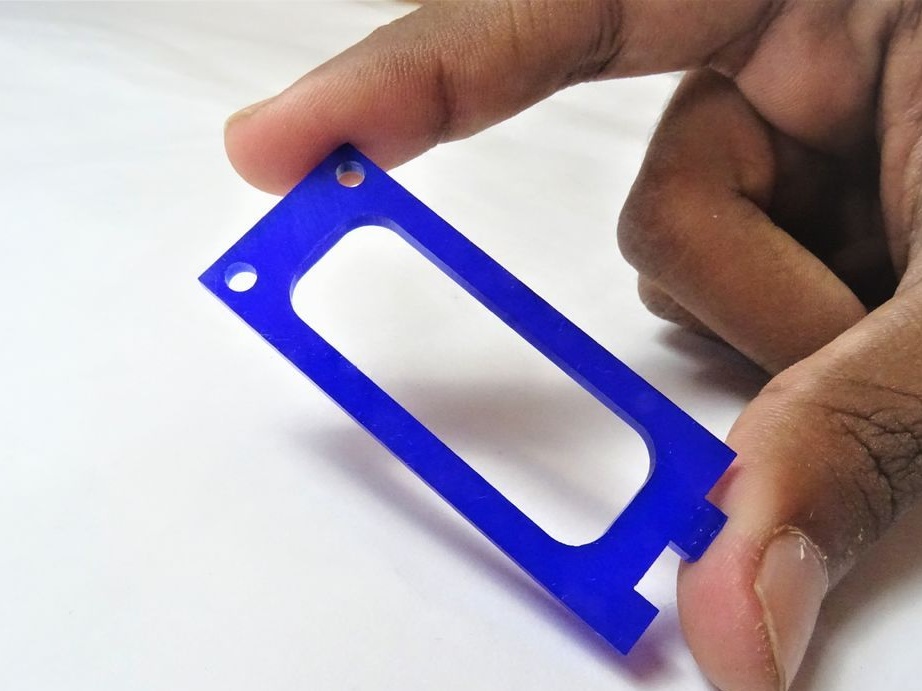
Maitinimo pusė mėlyna 3 mm x 4
Tilto viršutinis gabalas mėlynas 3 mm x 2
Variklio diskas baltas 3 mm x 2
Priekinis ratas baltas 10 mm x 2
Vidinis ratlankis (galinis ratas) baltas 3 mm x 4
Išorinis ratlankis (galinis ratas) Baltas 10 mm x 2
Vairavimas baltas 3 mm x 1
Stalčių spintelė juoda 3 mm x 1
Juodo skyriaus dangtis 3 mm x 1
Galinis variklio velenas Baltas 3 mm x 2
Priekinis skydelis baltas 5 mm x 2



CNC failą galite atsisiųsti iš nuorodos.
Lazeriu pjaustomos „Rover“ dalys.zip
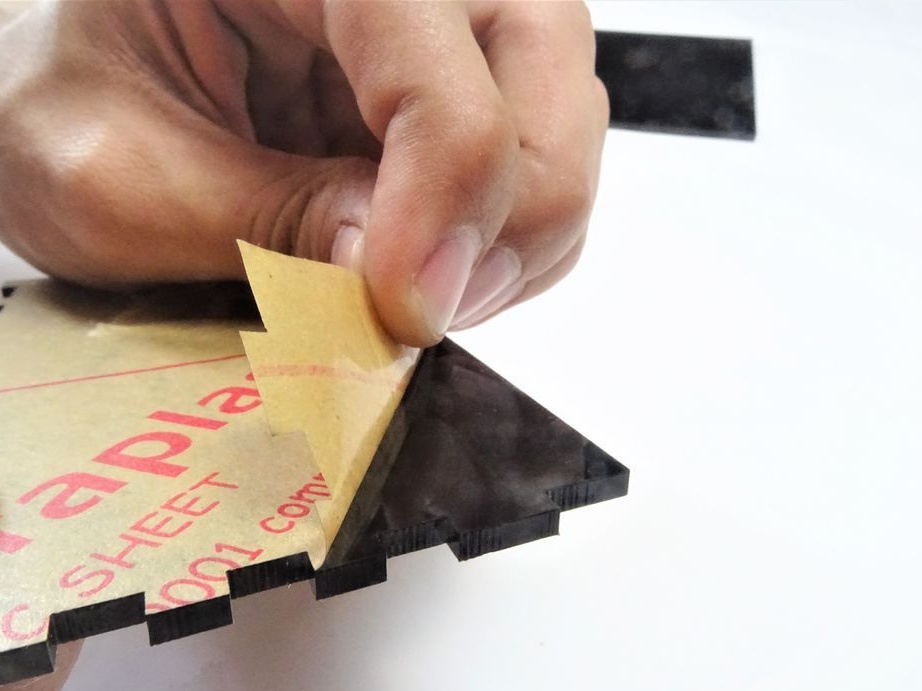
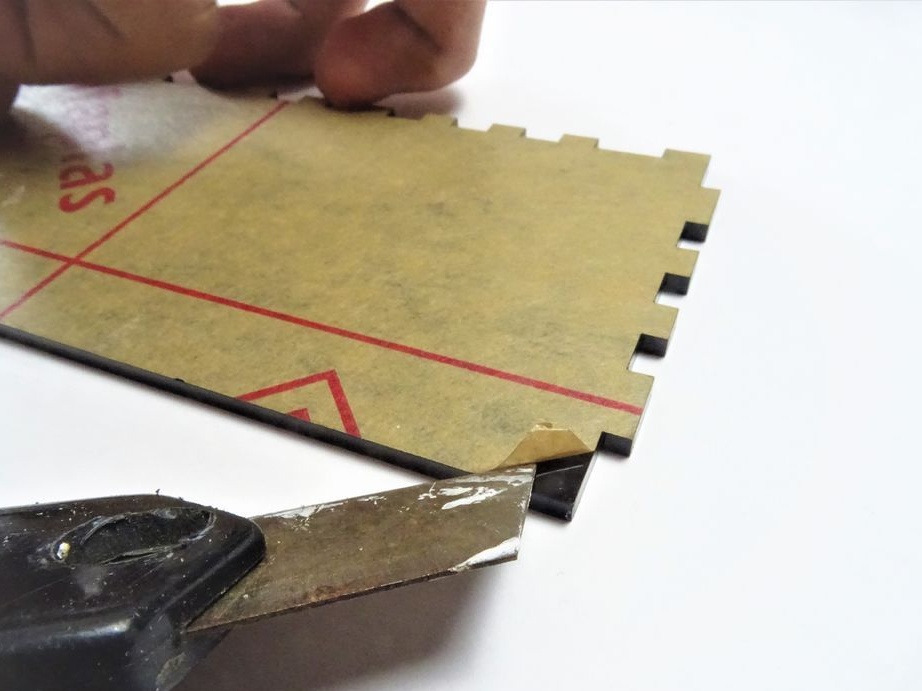
Pagaminęs detales, nuima nuo jų apsauginį sluoksnį.
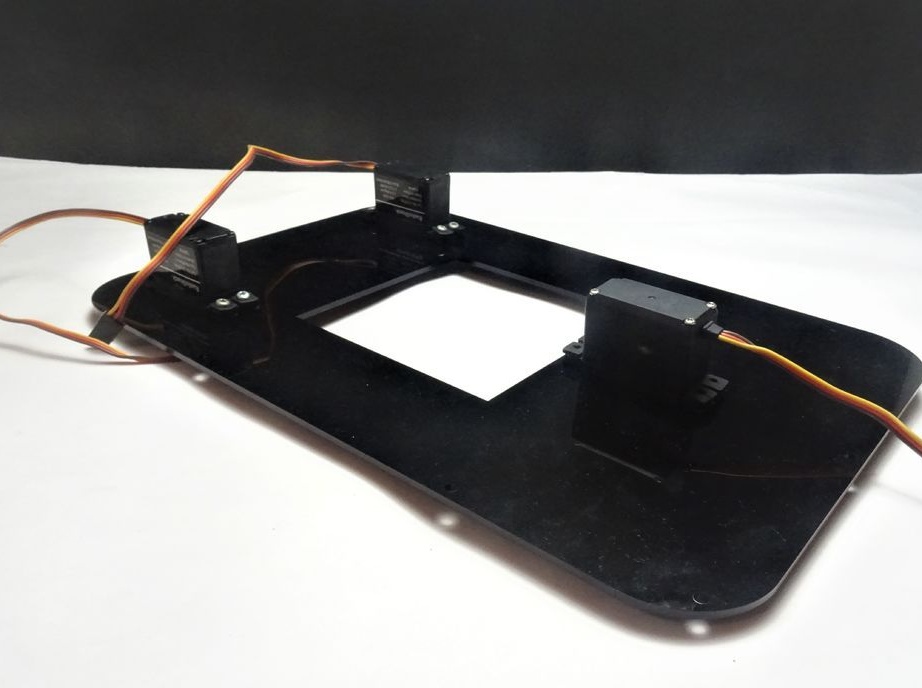
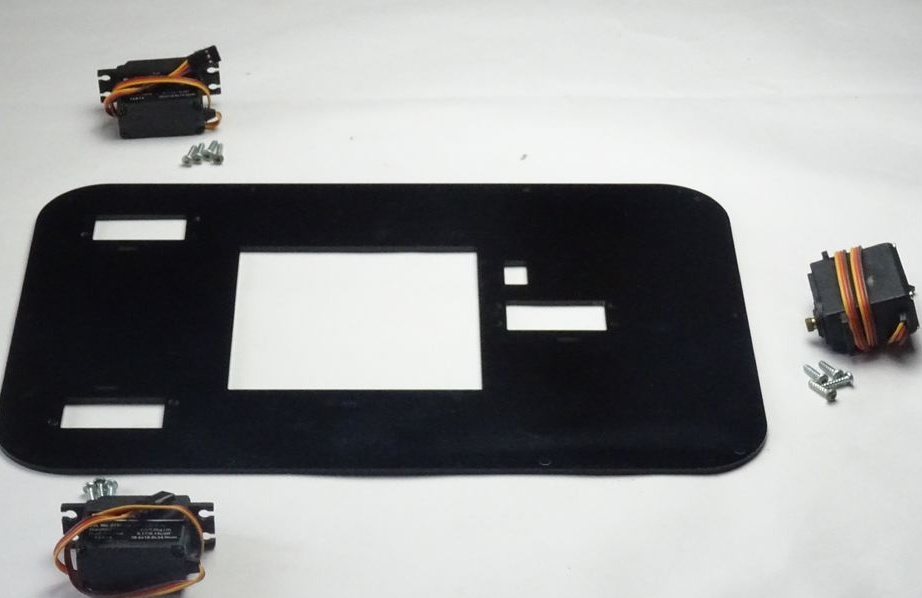
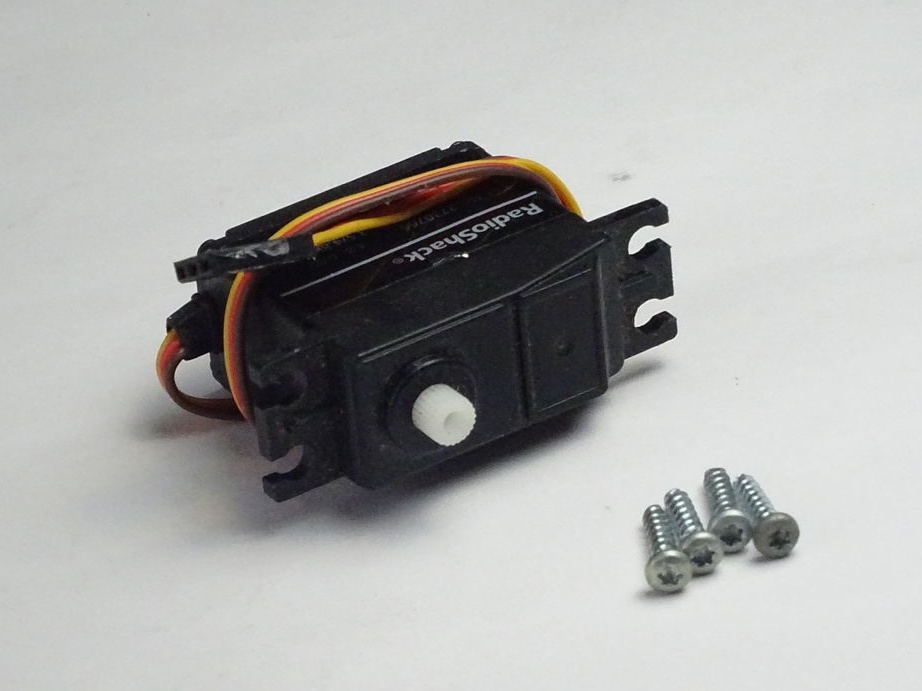
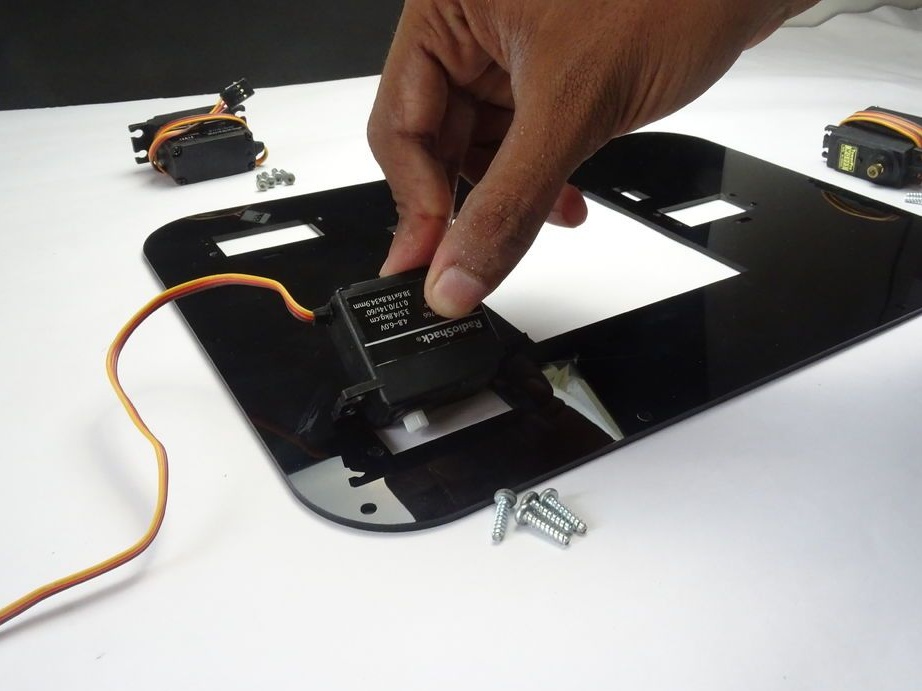
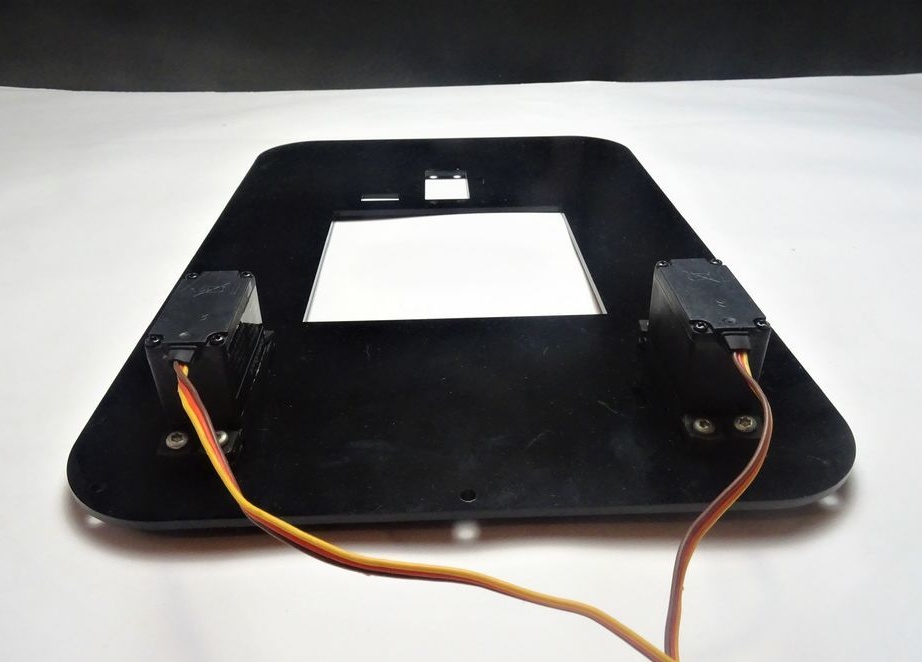
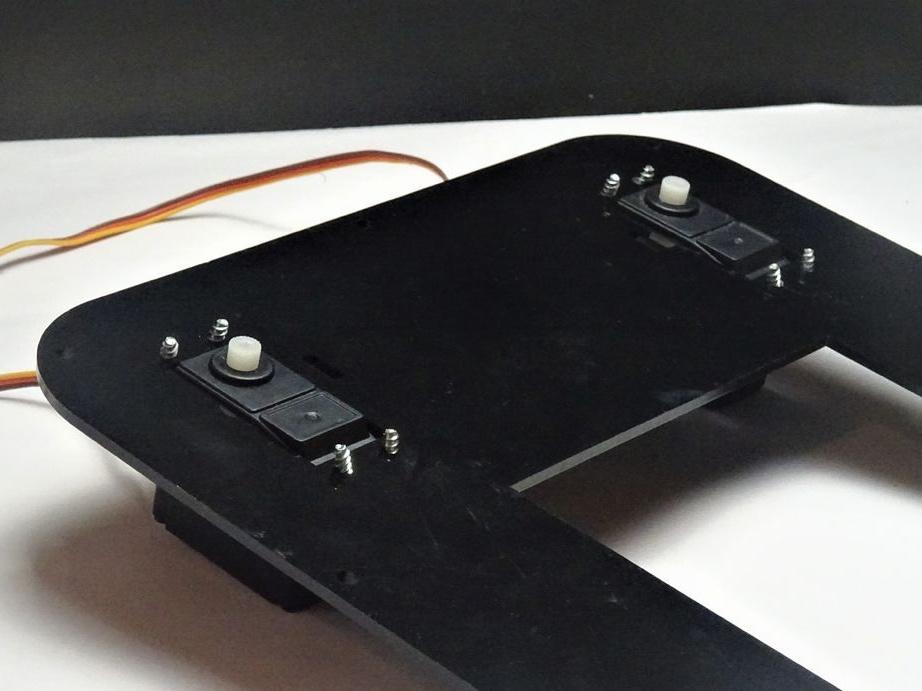
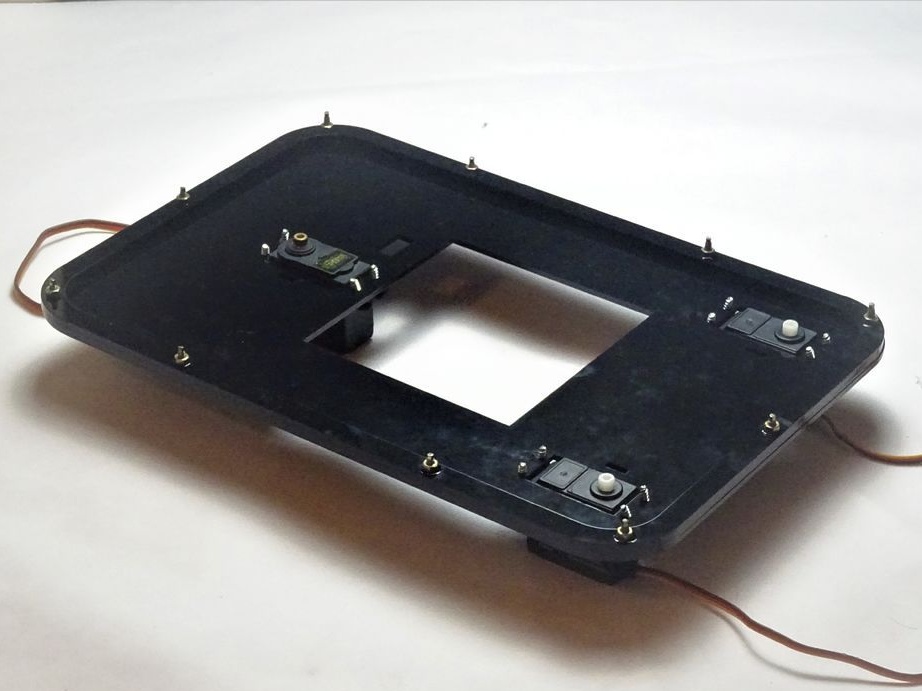
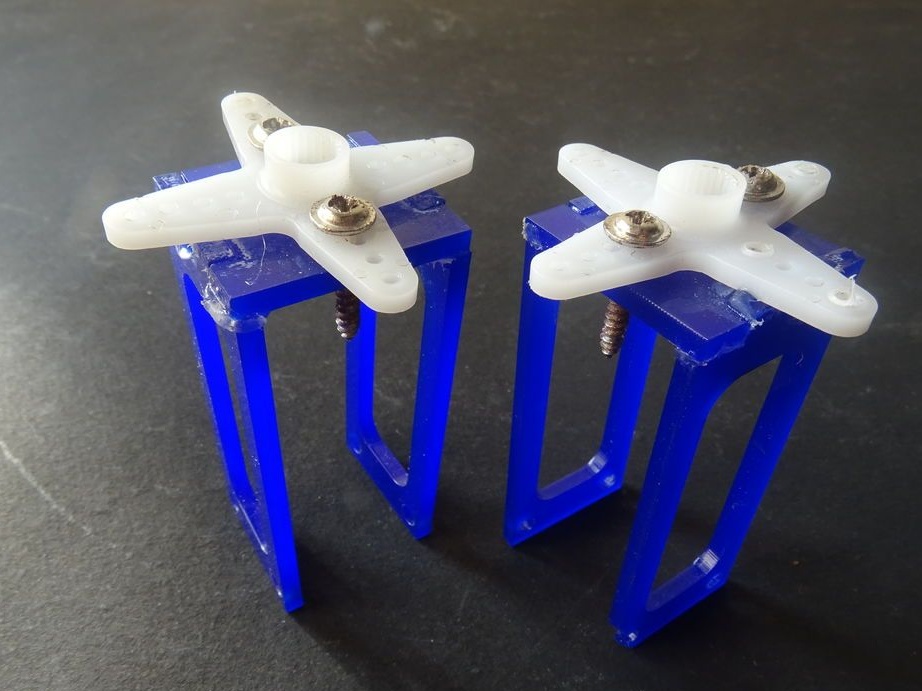
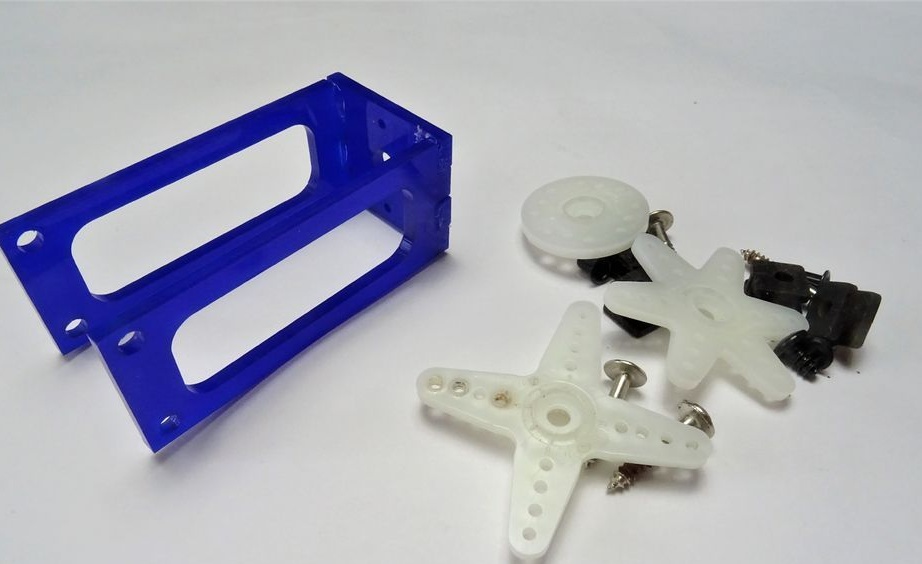
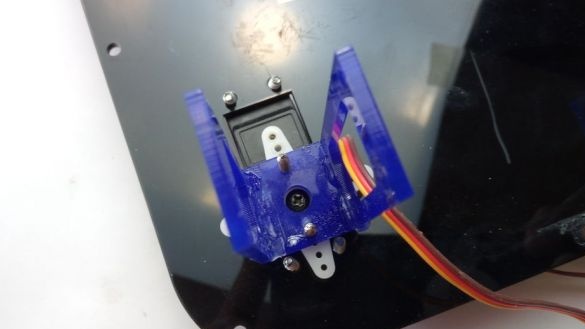
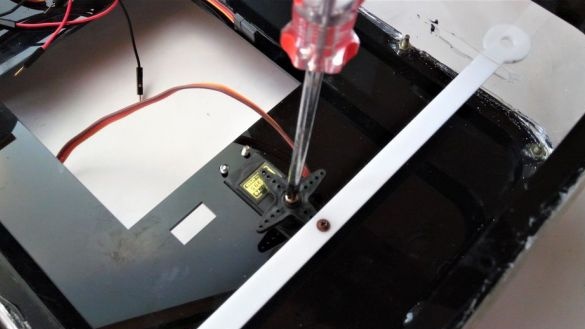
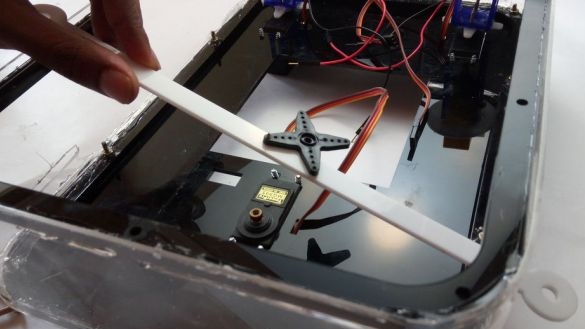
Trečias žingsnis: Įdiekite „Servo Motors“
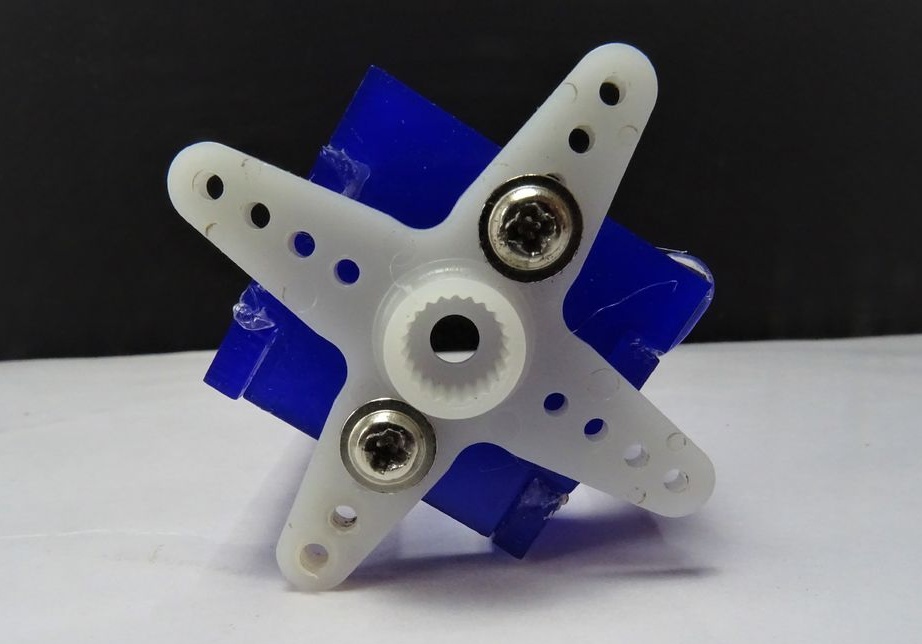
Visi trys servovarikliai yra prisukami prie platformos. Du į užpakalį ir vienas į priekį.

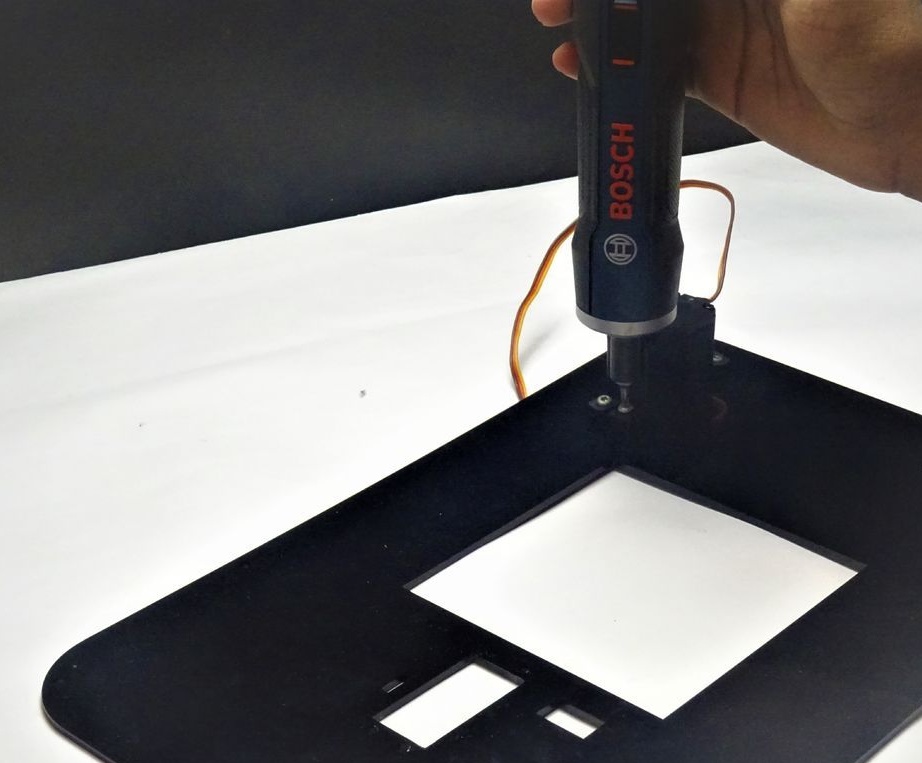
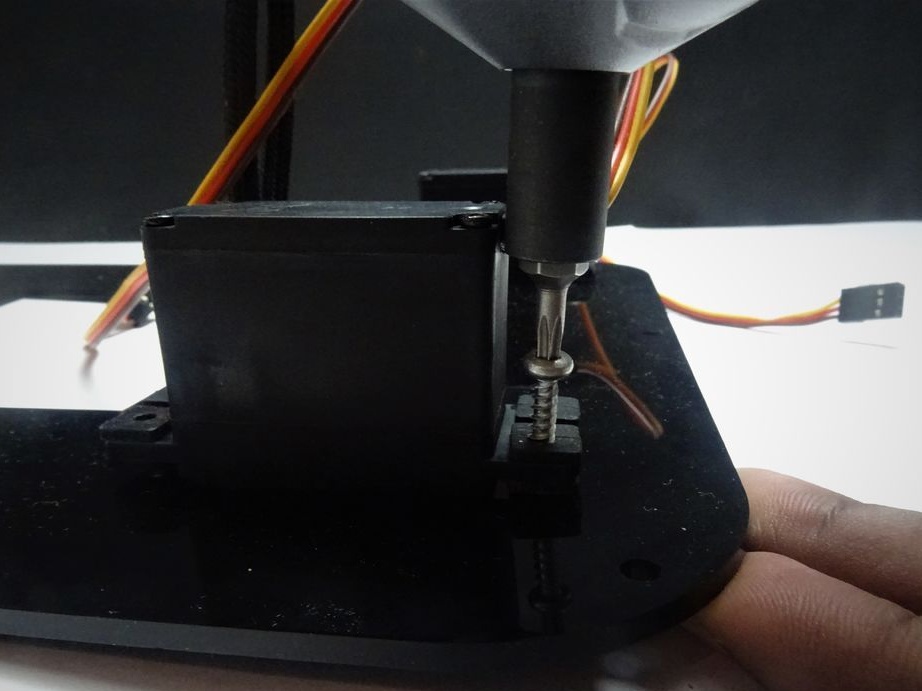
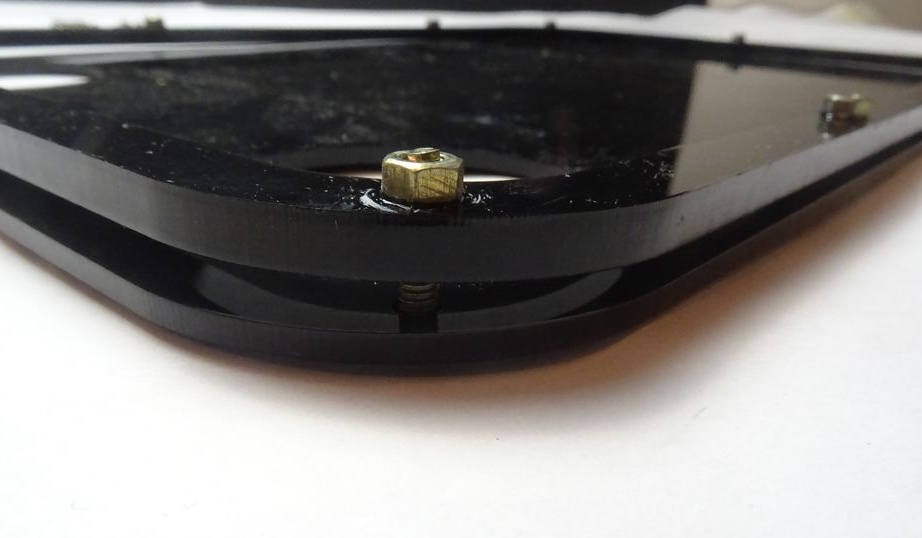
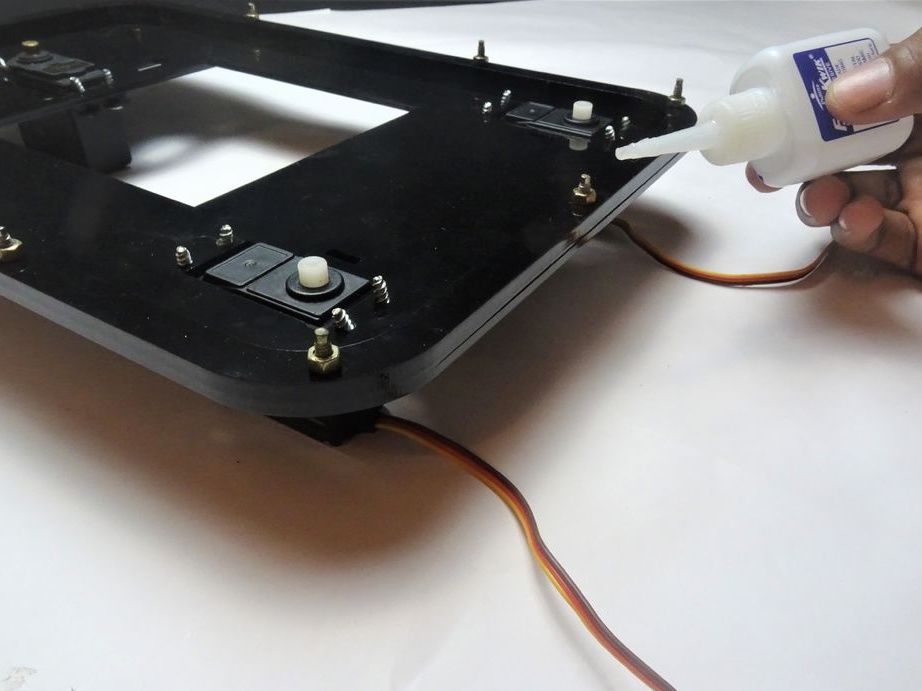
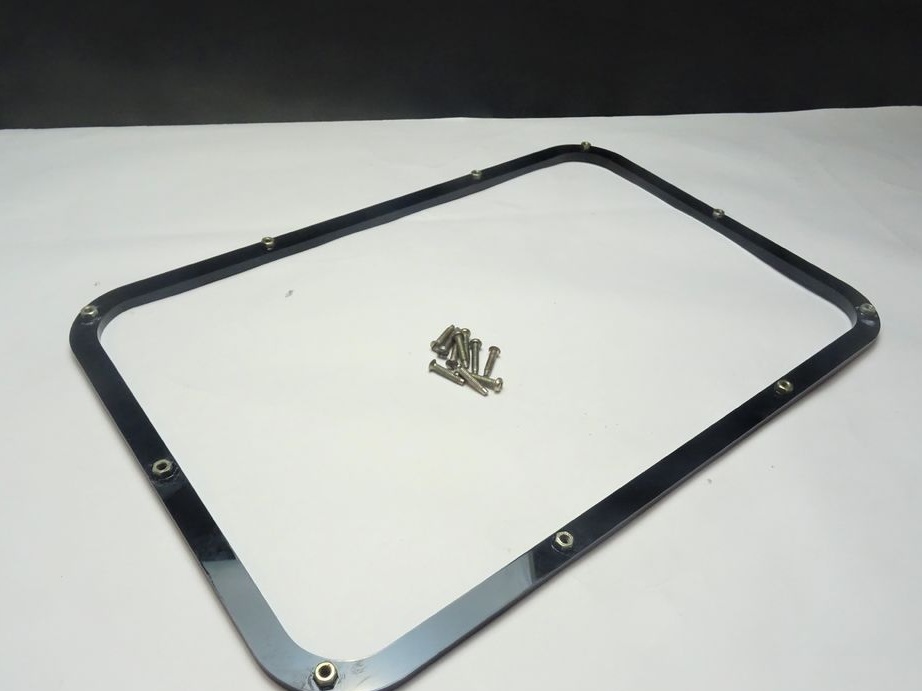
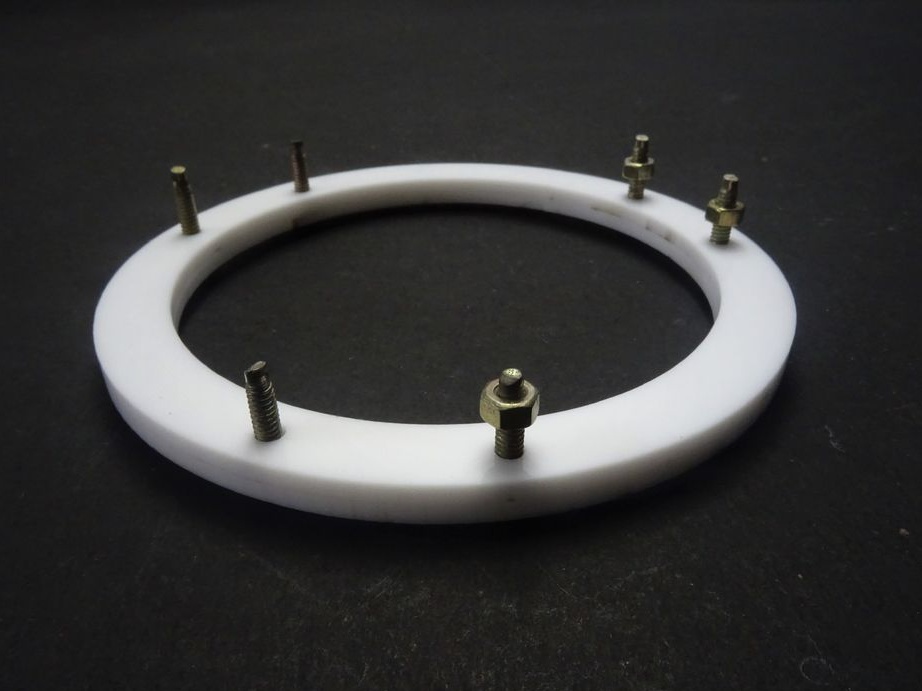
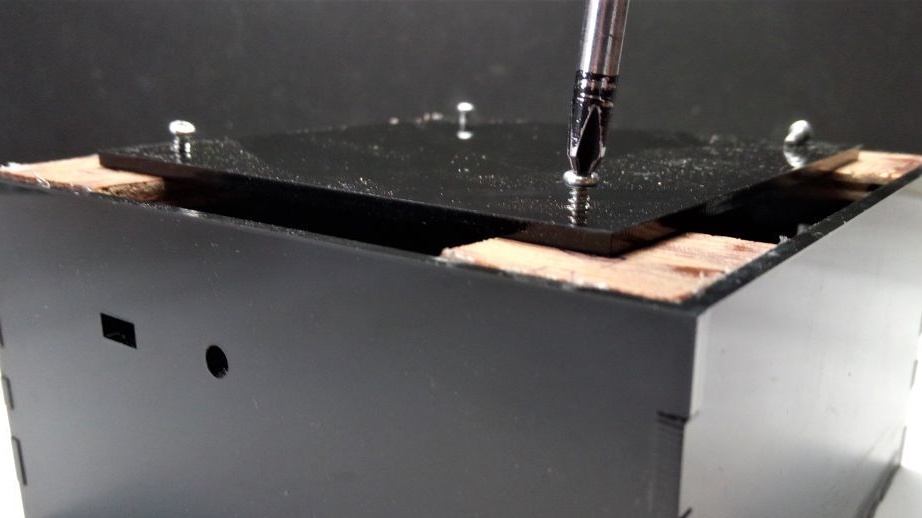
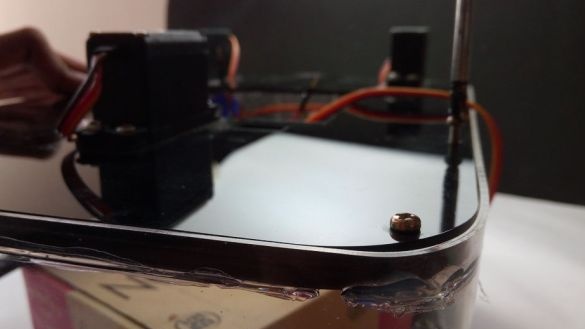
Ketvirtas žingsnis: riešutai
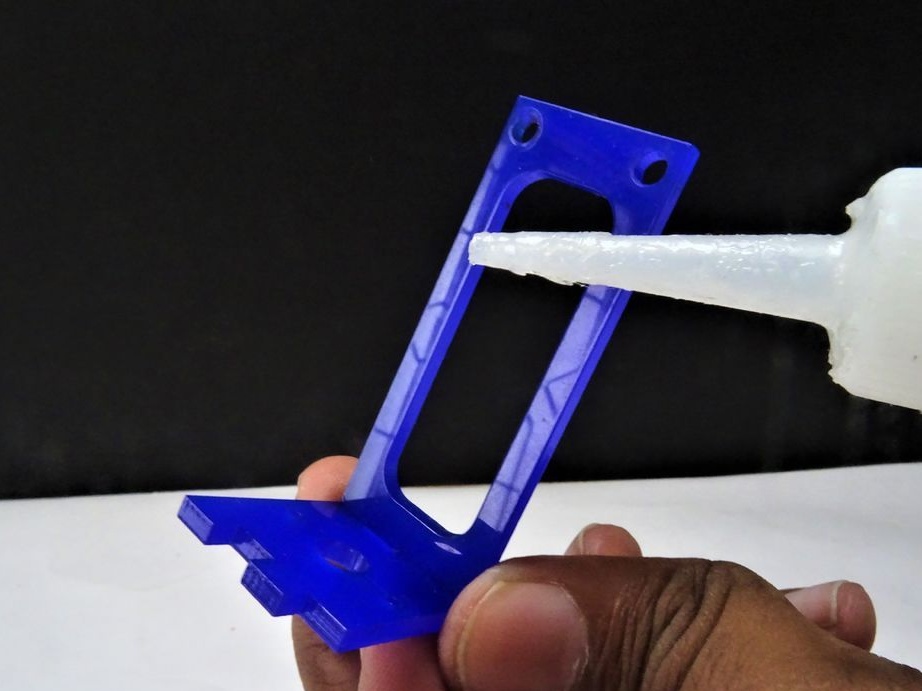
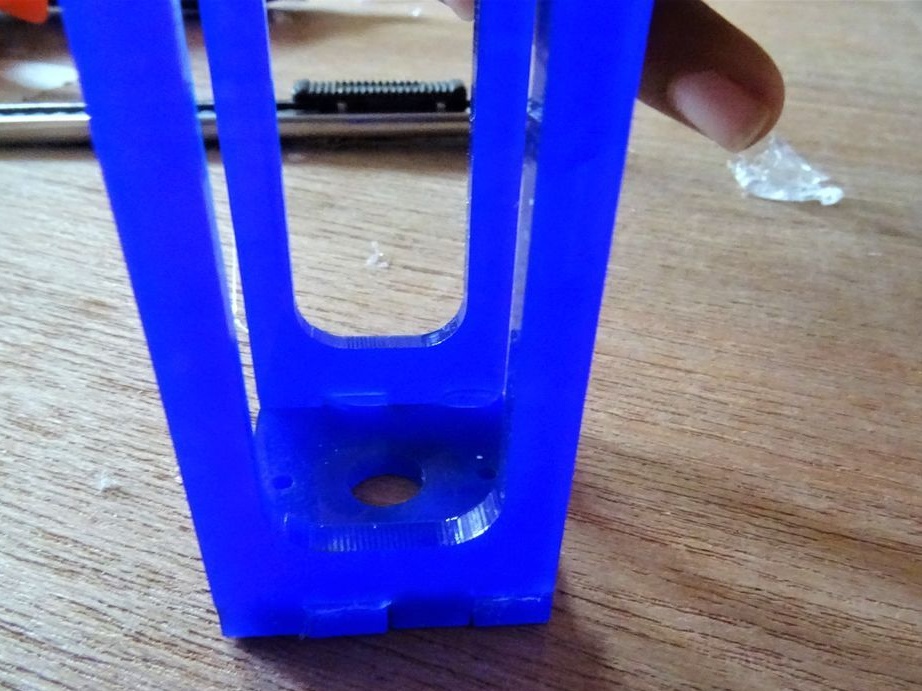
Norint pasiekti mechanizmus, viršutinė ir apatinė dalys yra varžtais sujungtos. Klijuojame superklijaus veržles prie rėmo, o tada sutvirtiname epoksidine.


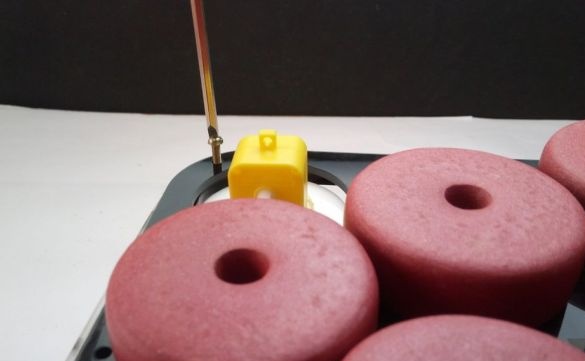
Penktas žingsnis: plūdės
Klijai plūdės.



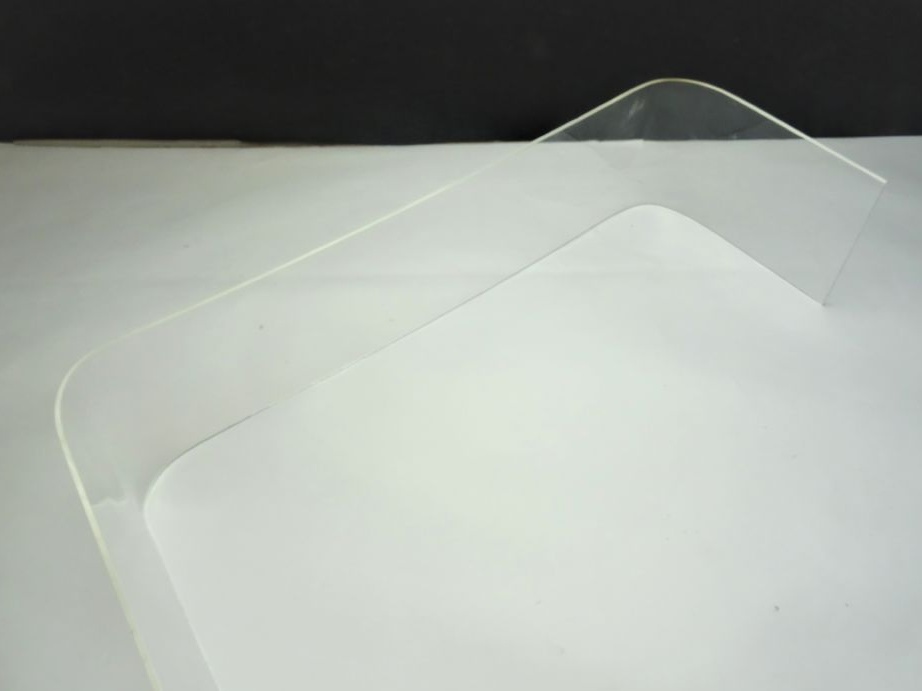
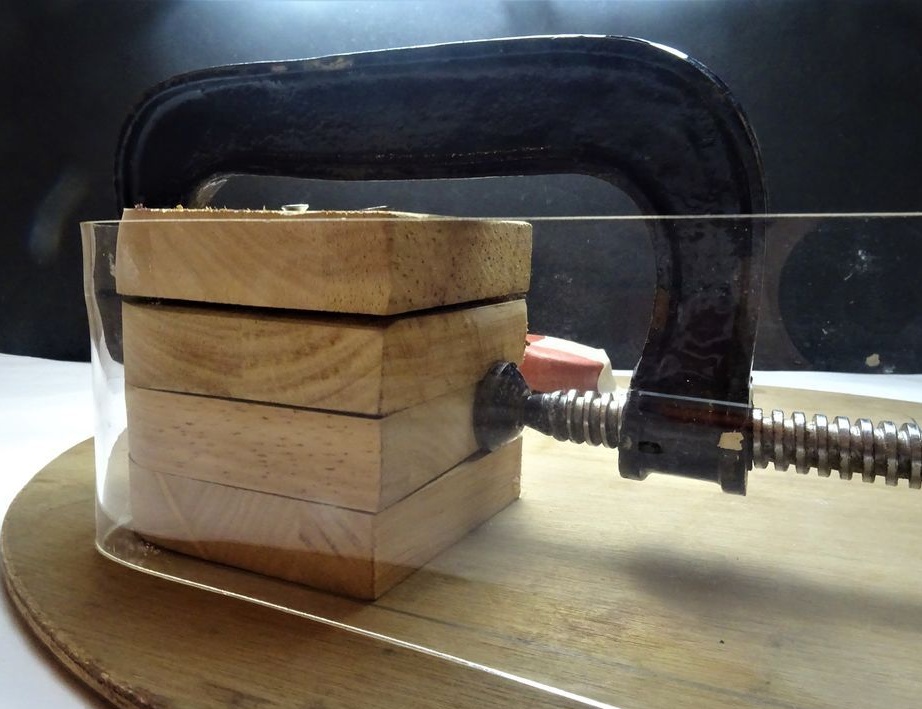
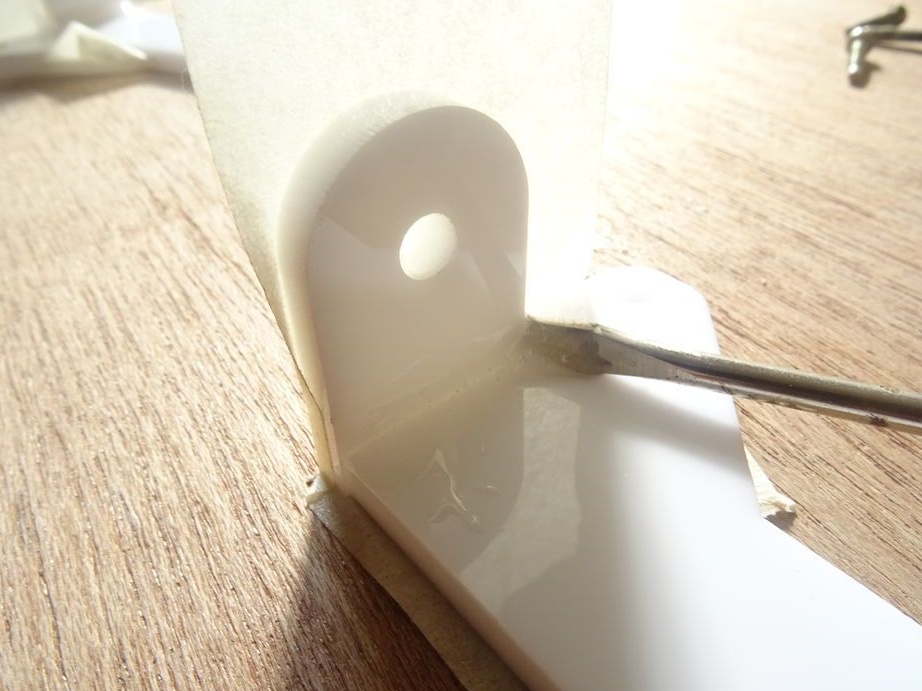
Šeštas žingsnis: Akrilo formavimas
Norėdami sulenkti akrilą, amatininkas pagamina šabloną iš medžio.



Jis apkaba detalę spaustuku ir, kaitindamas ją plaukų džiovintuvu, suteikia daliai norimą formą.





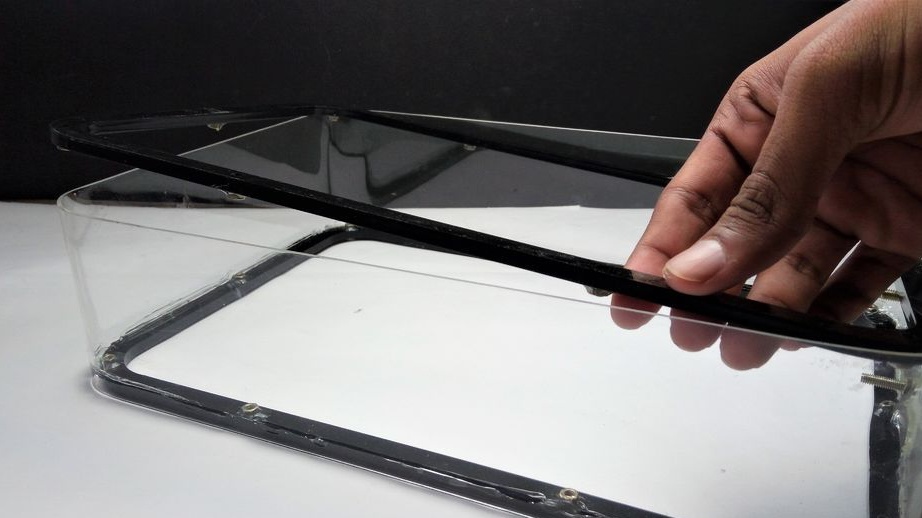
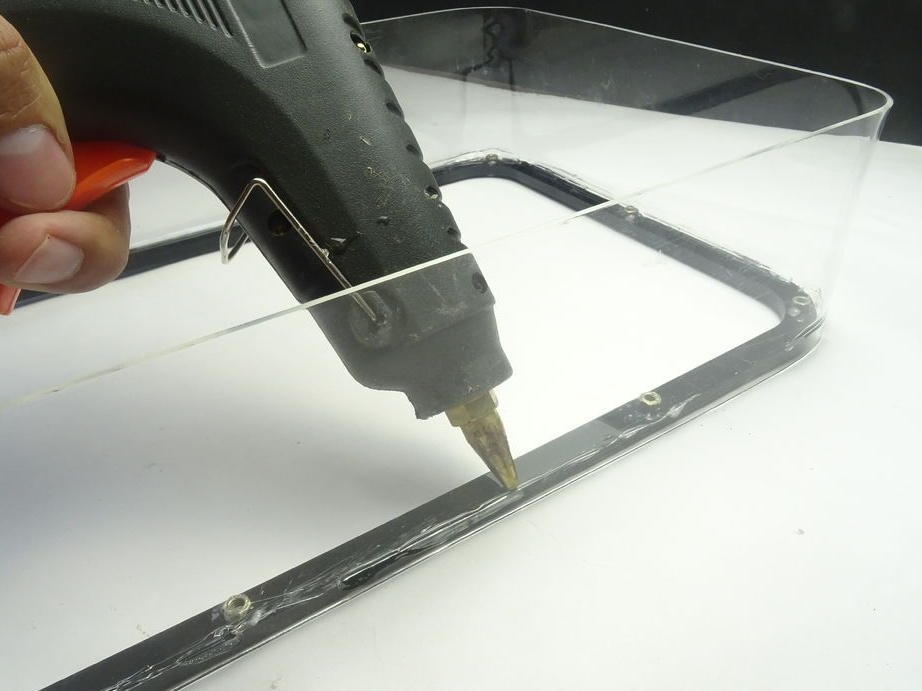
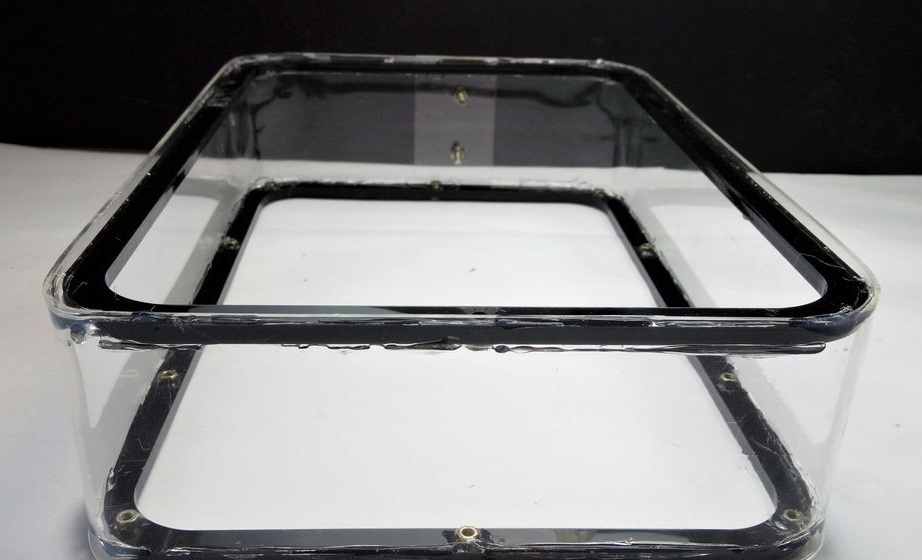
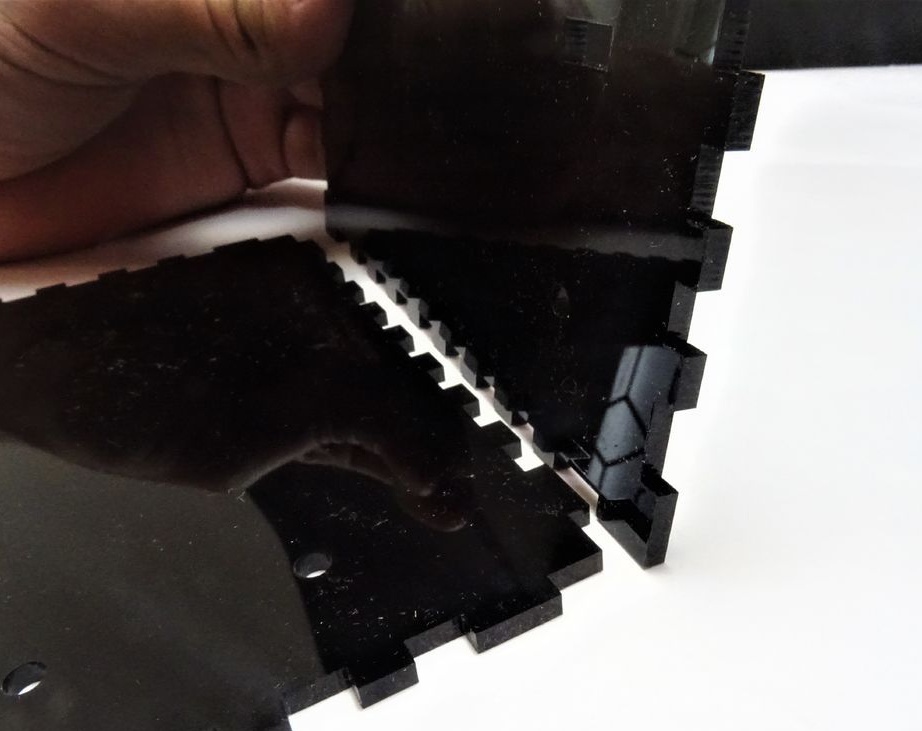
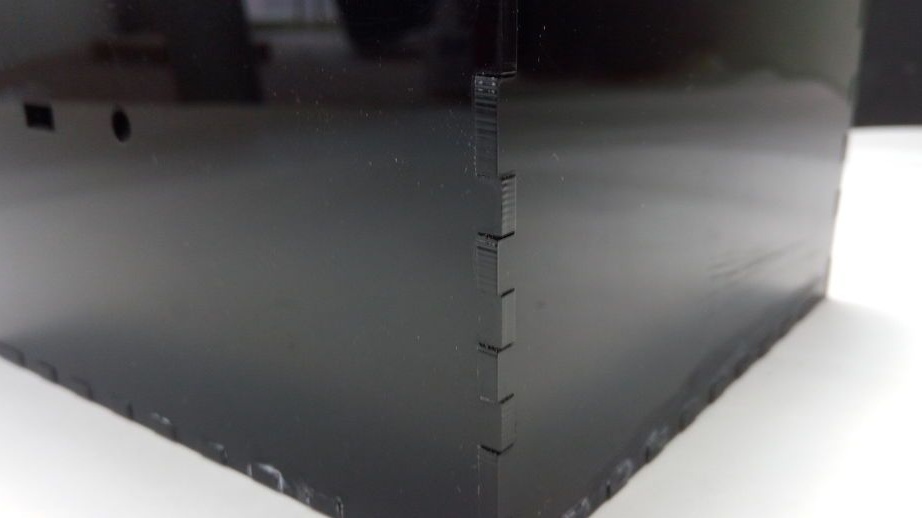
Septintas žingsnis: sistema
Klijuoja viršutinį ir apatinį rėmus prie permatomo kūno. Siūlės atsargiai uždaromos karštais klijais.







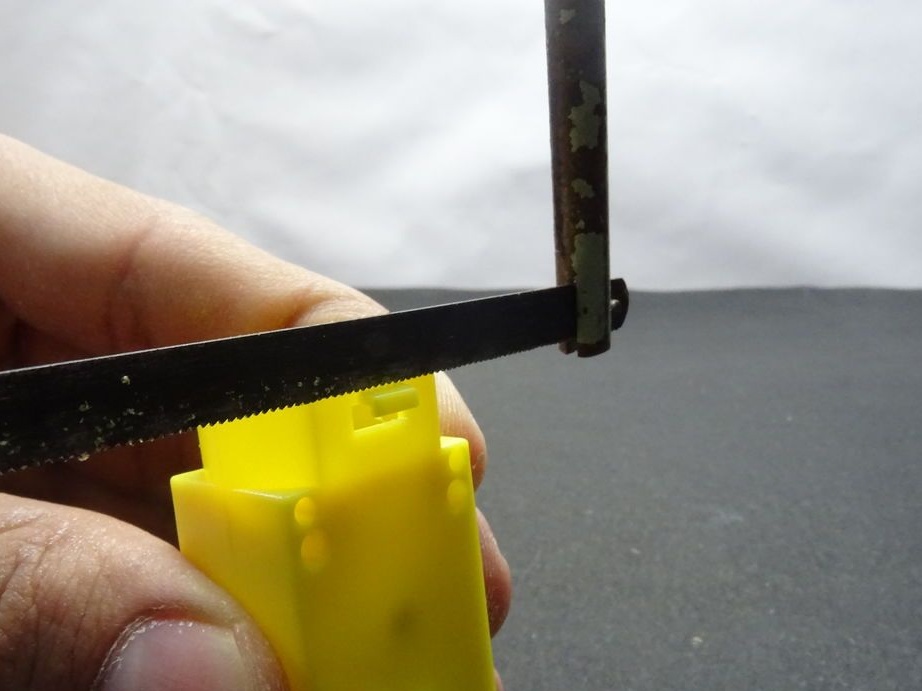
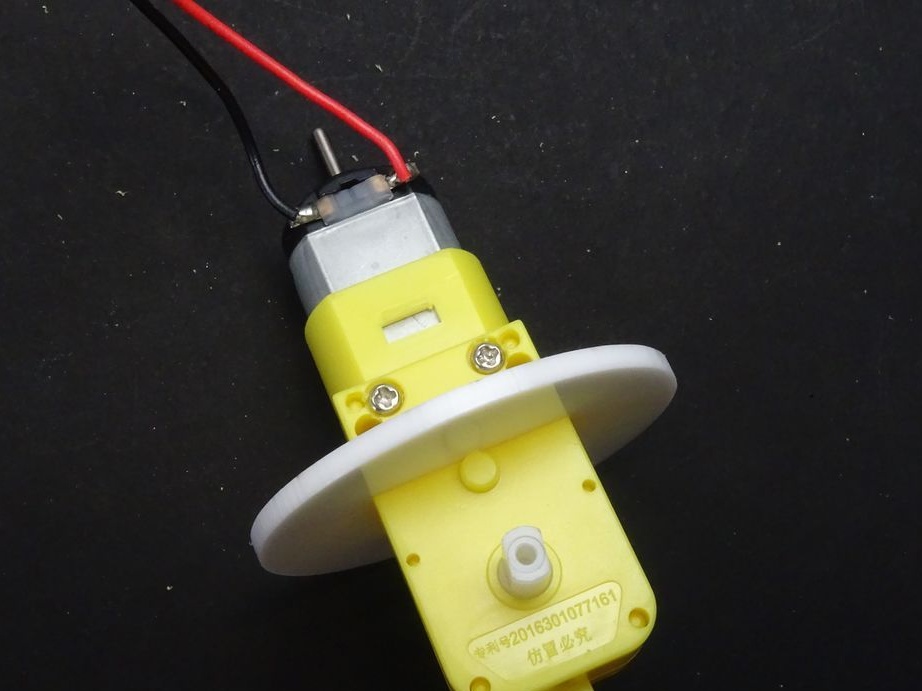
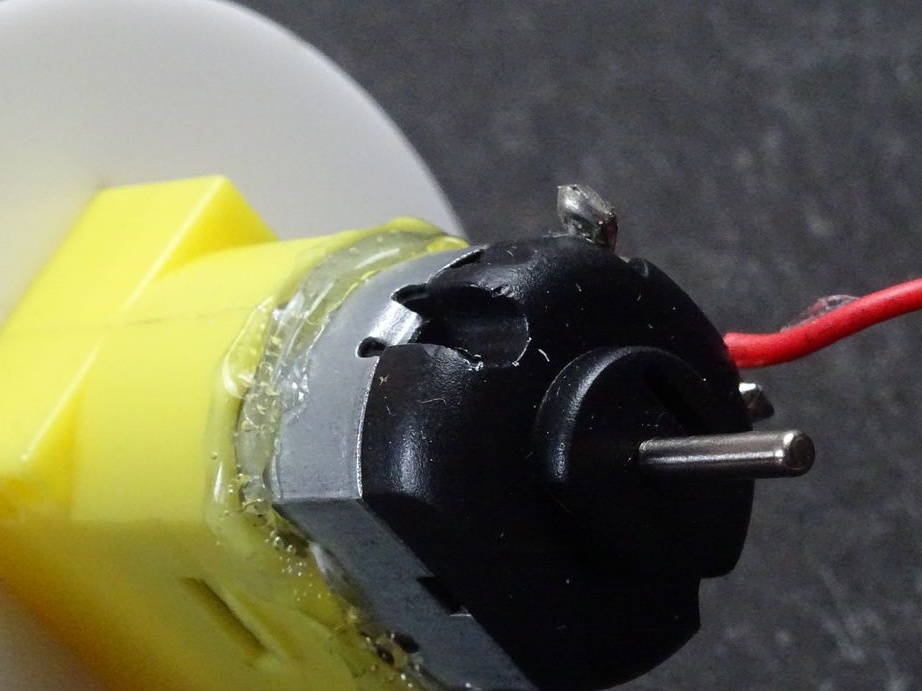
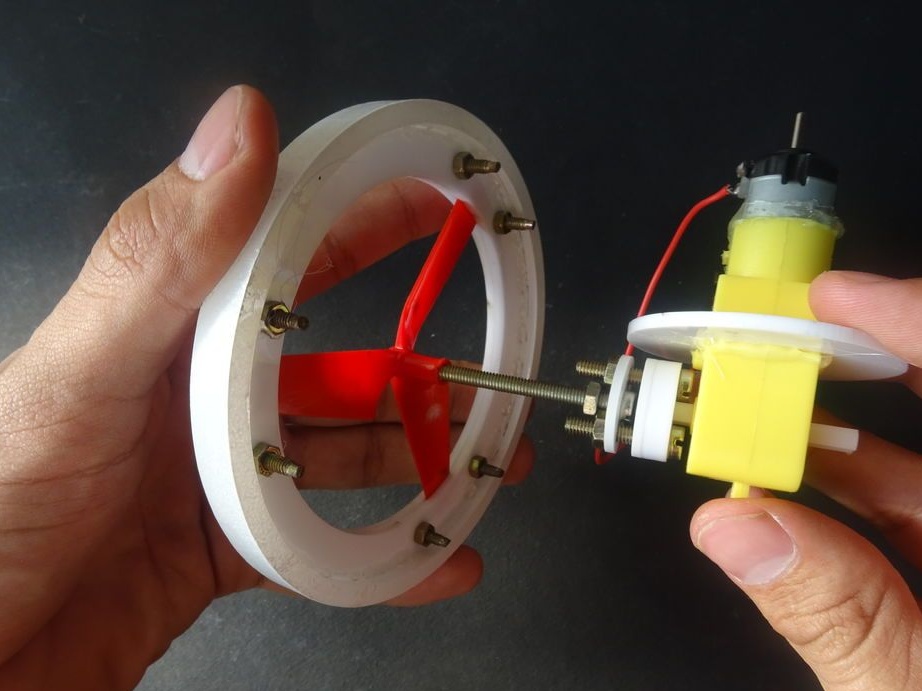
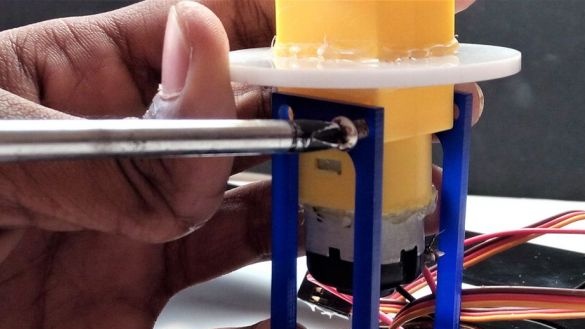
Aštuntas žingsnis: Variklio derinimas
Dabar jums reikia apdoroti variklio korpusą, kad ant jo būtų sumontuotos dalys.
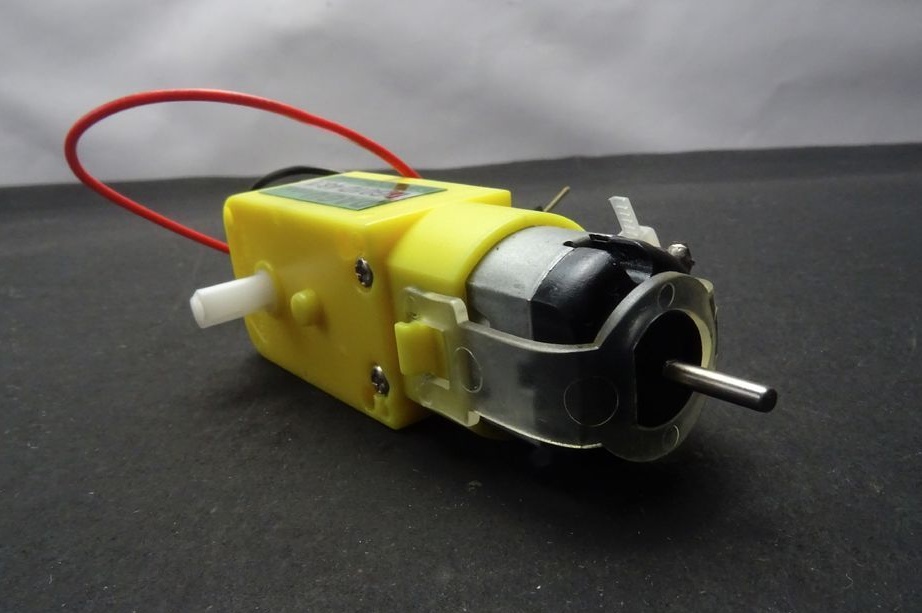
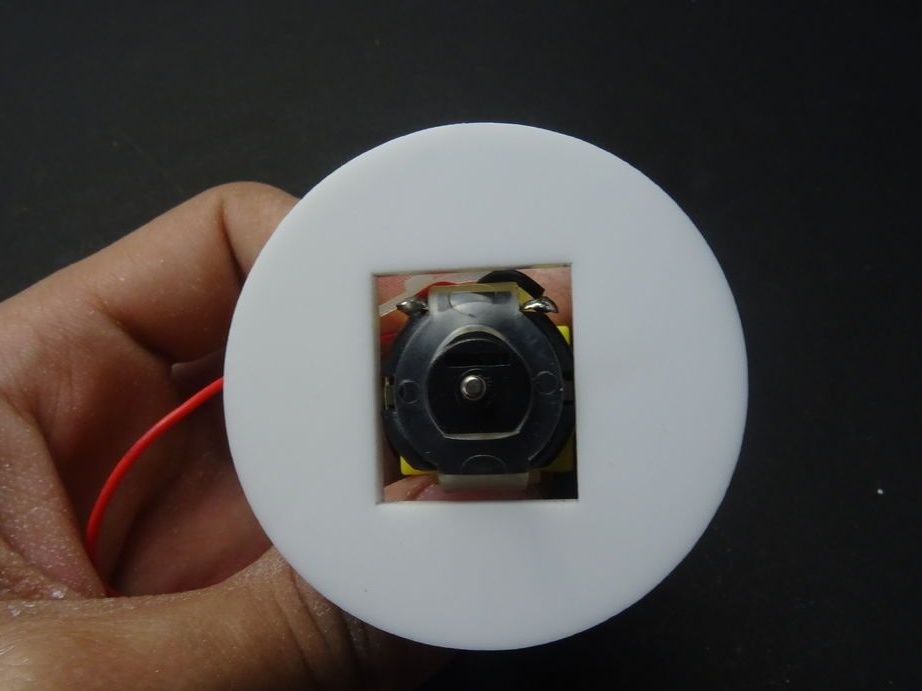
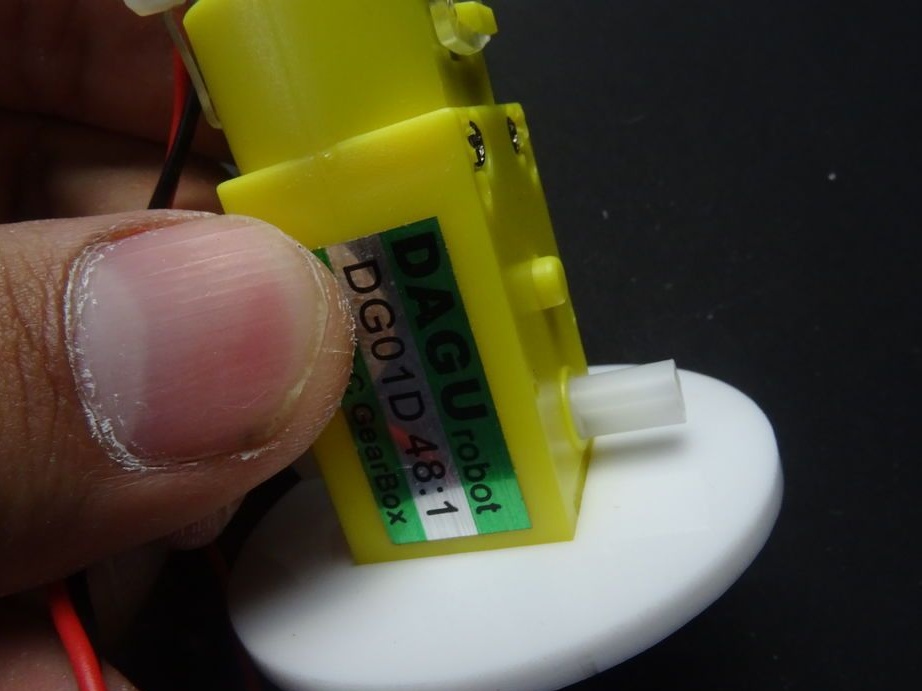

Nupjauna visas išsikišusias dalis nuo kūno iki lipduko.
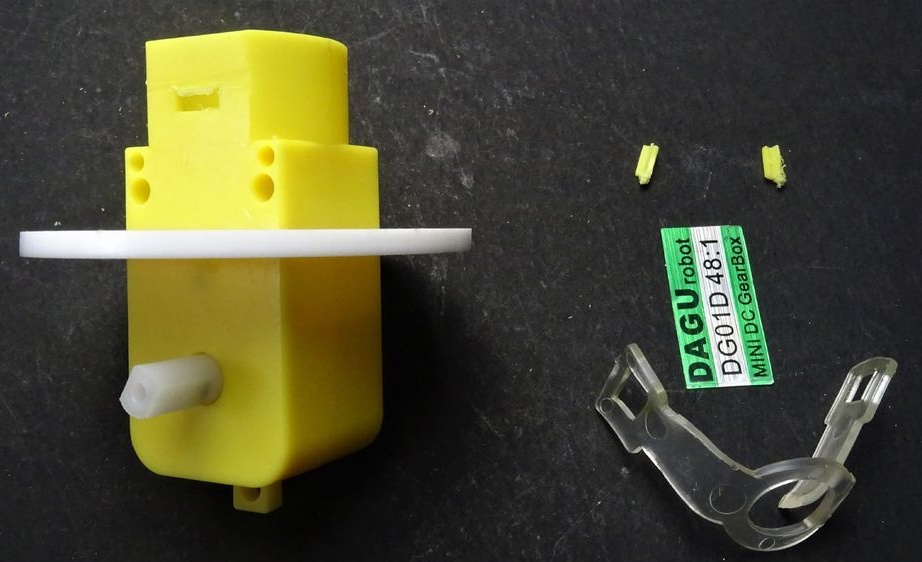

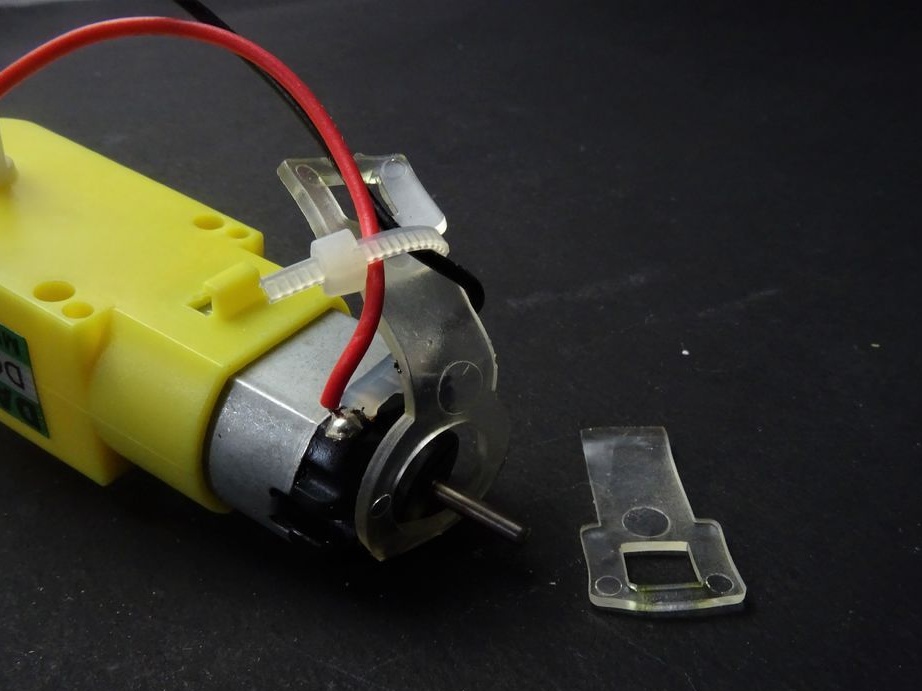


Montuoja dalį ant kūno ir ją klijuoja. Kadangi reikėjo nupjauti variklio laikiklį (skląsčius), variklis taip pat pritvirtinamas klijais.

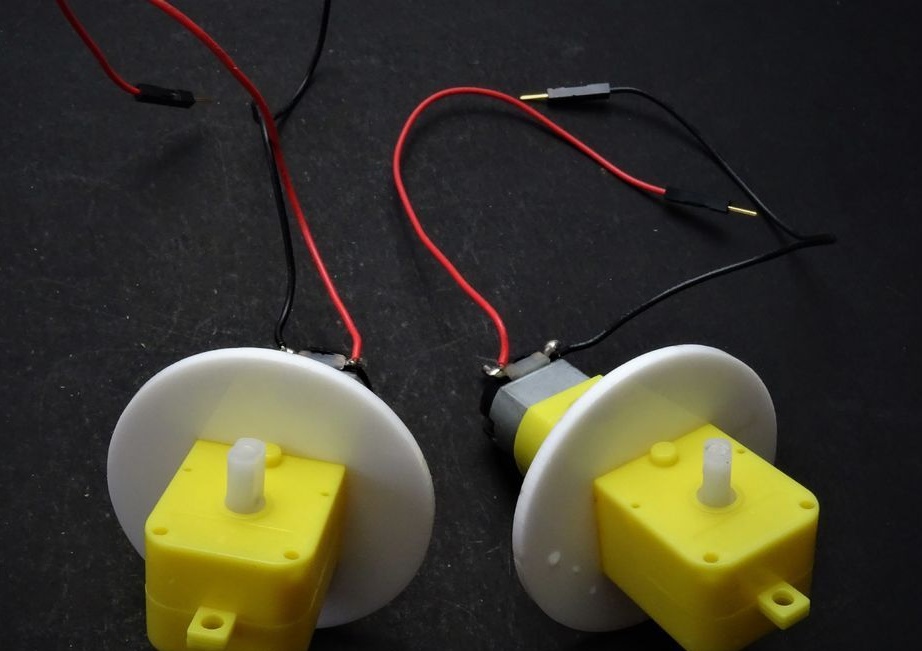

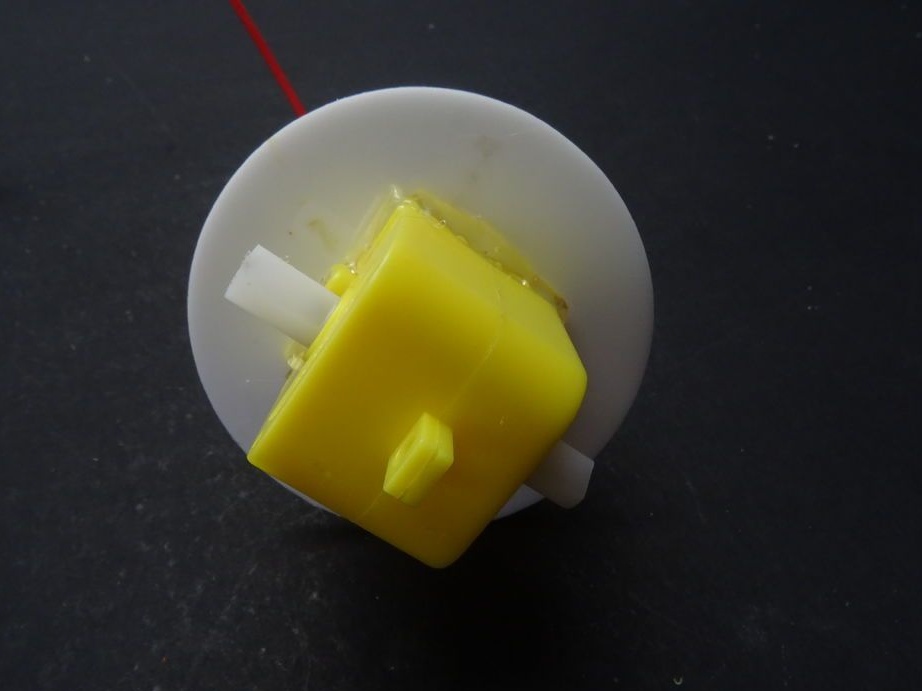
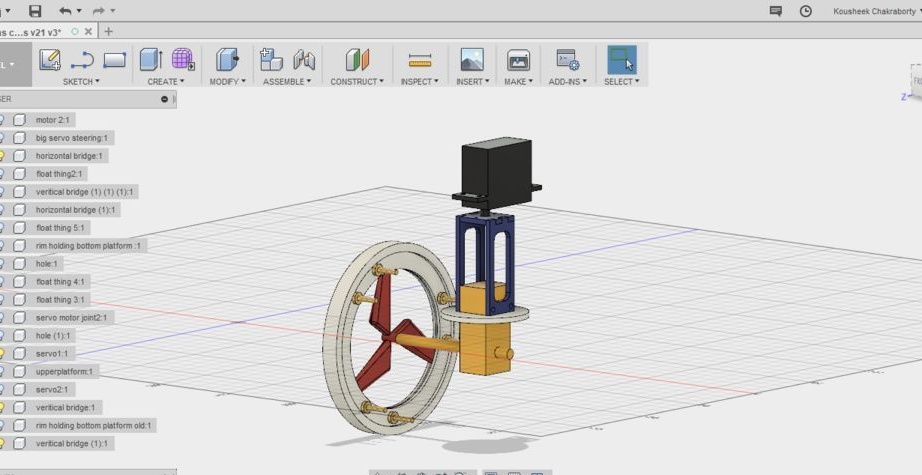
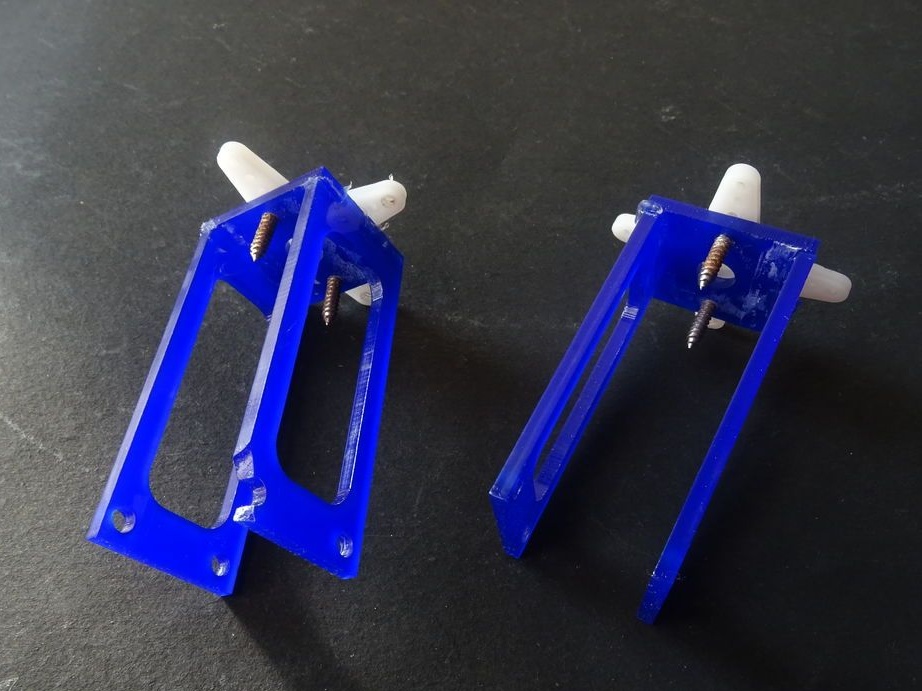
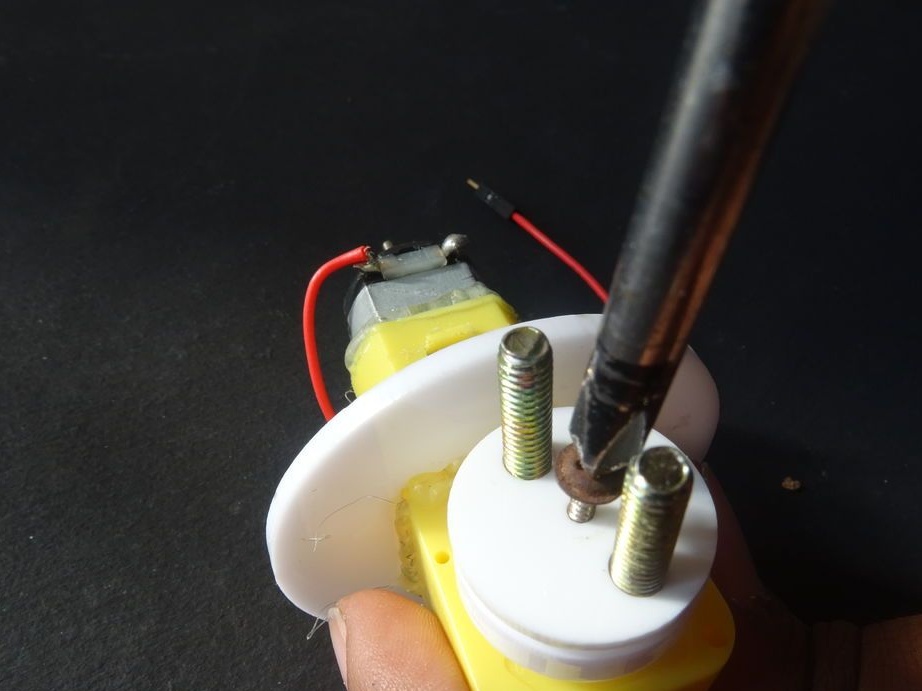
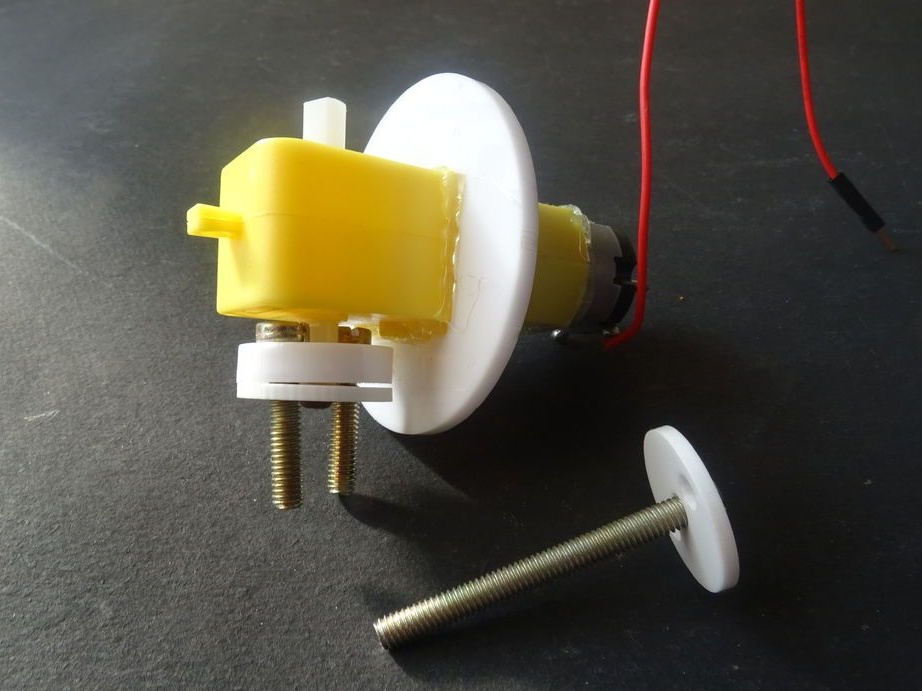
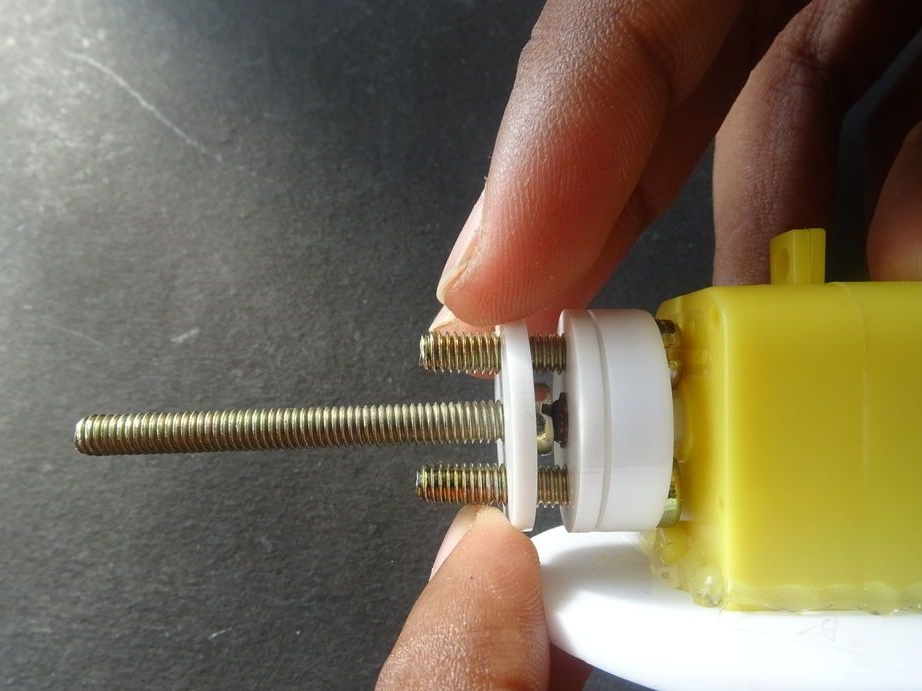
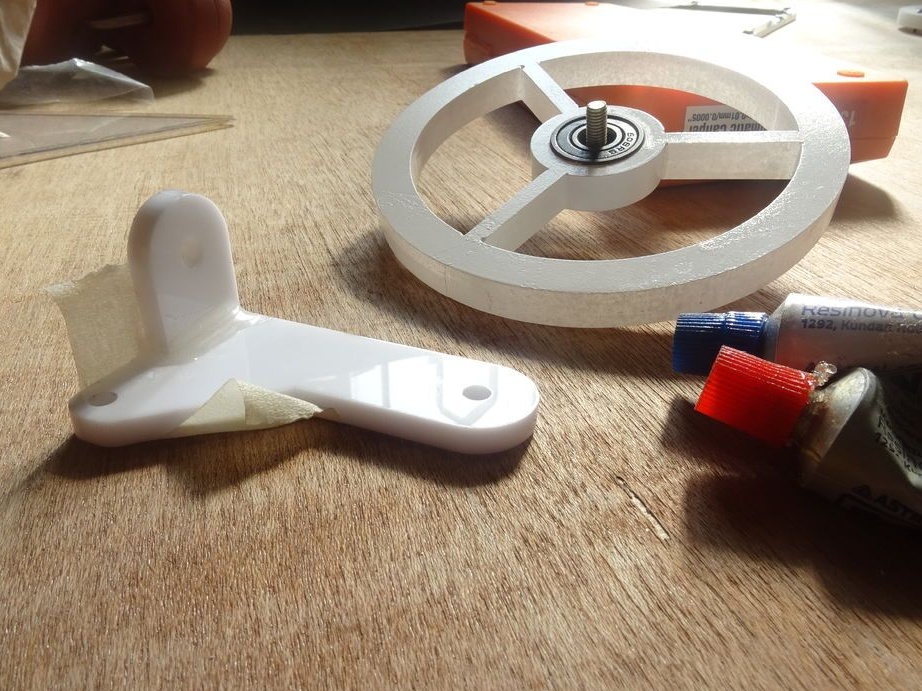
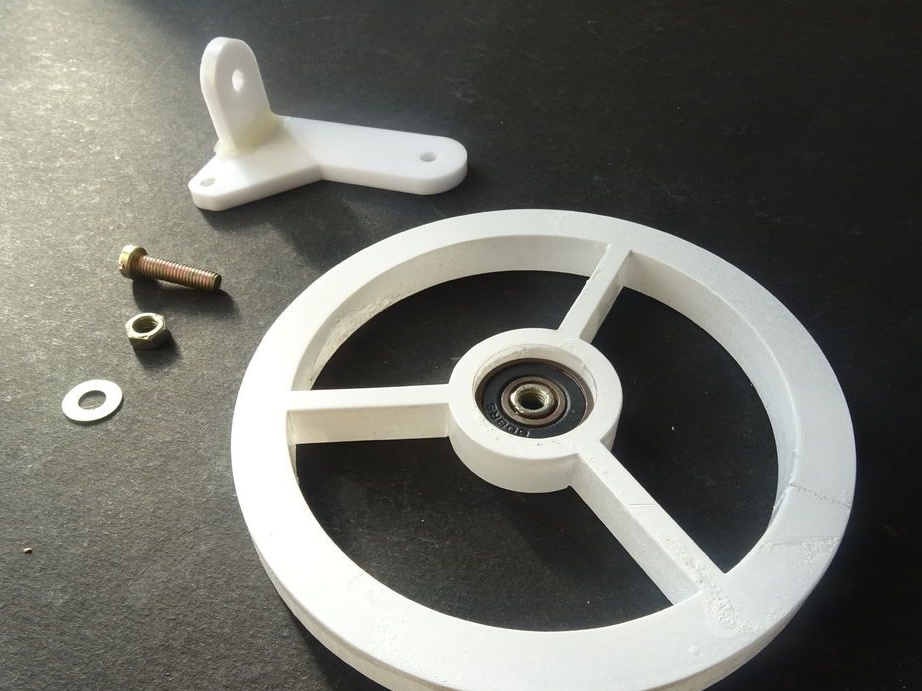
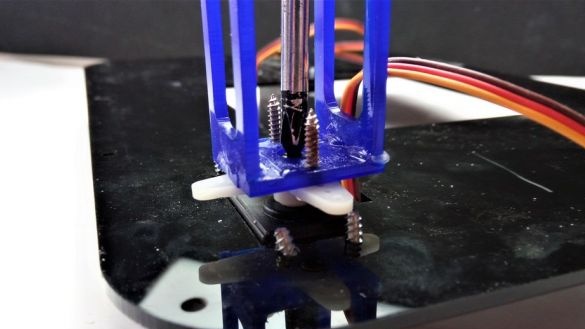
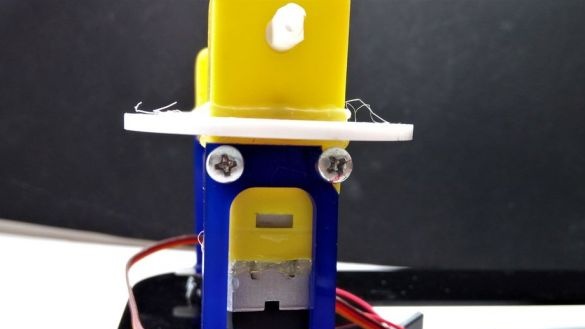
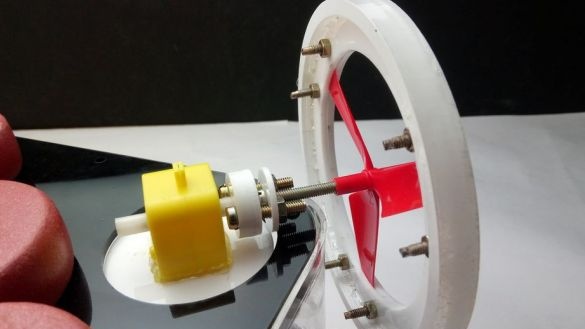
Devynis žingsnis: pasukamasis mechanizmas
Surinko sukamąjį korpusą. Jame bus sumontuotas variklis, kuris prisijungs prie servo pavaros.
Klijuoja dėklą.


Varžtai ant movos.


Dešimt žingsnis: Tapyba
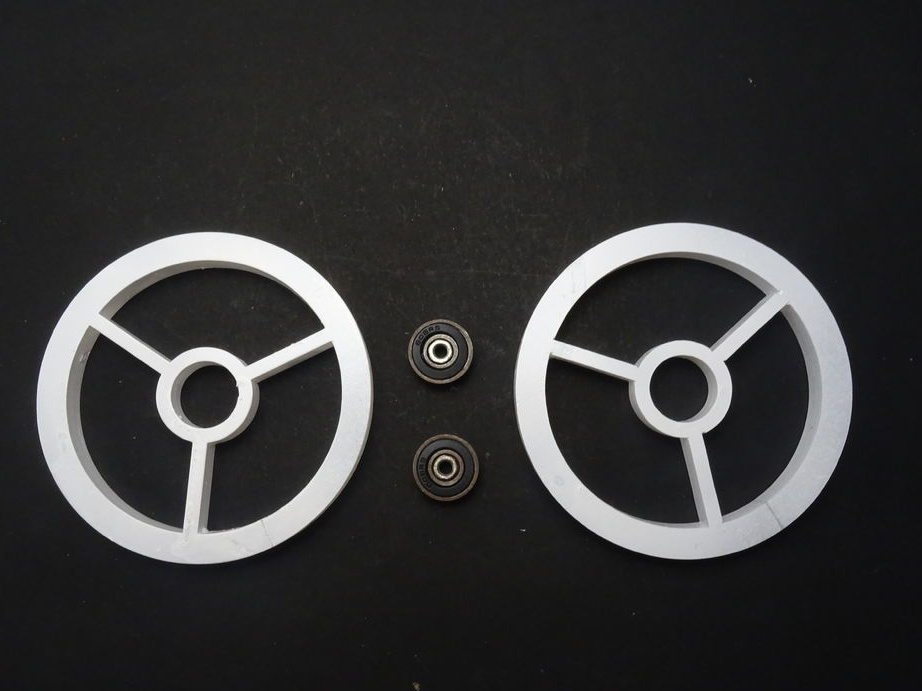
Kadangi meistras neturėjo reikiamo storio balto akrilo, ratai ir ratlankiai buvo iškirpti iš skaidraus akrilo ir vėliau nudažyti balta spalva.




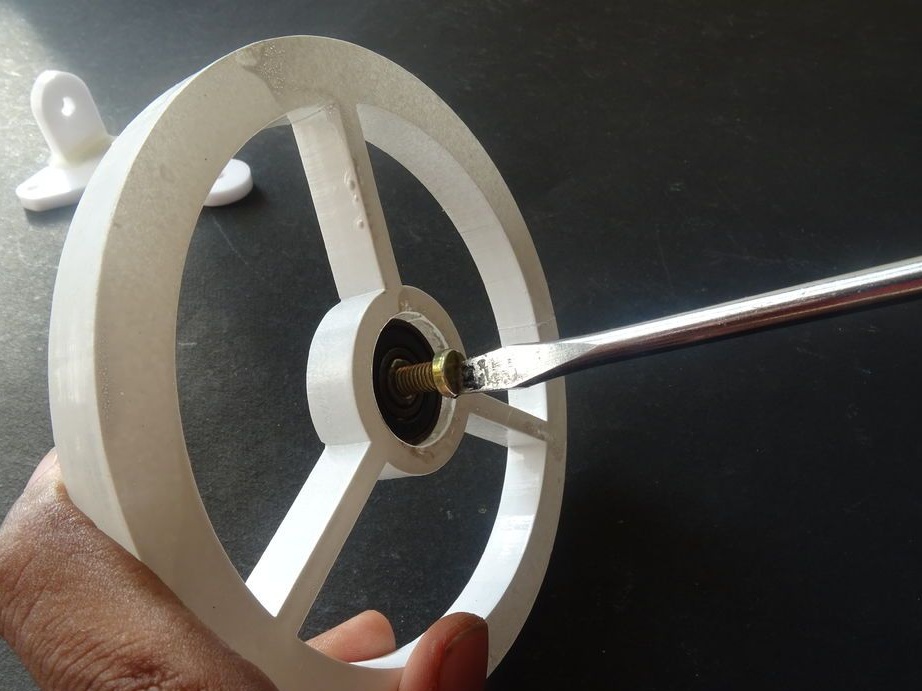
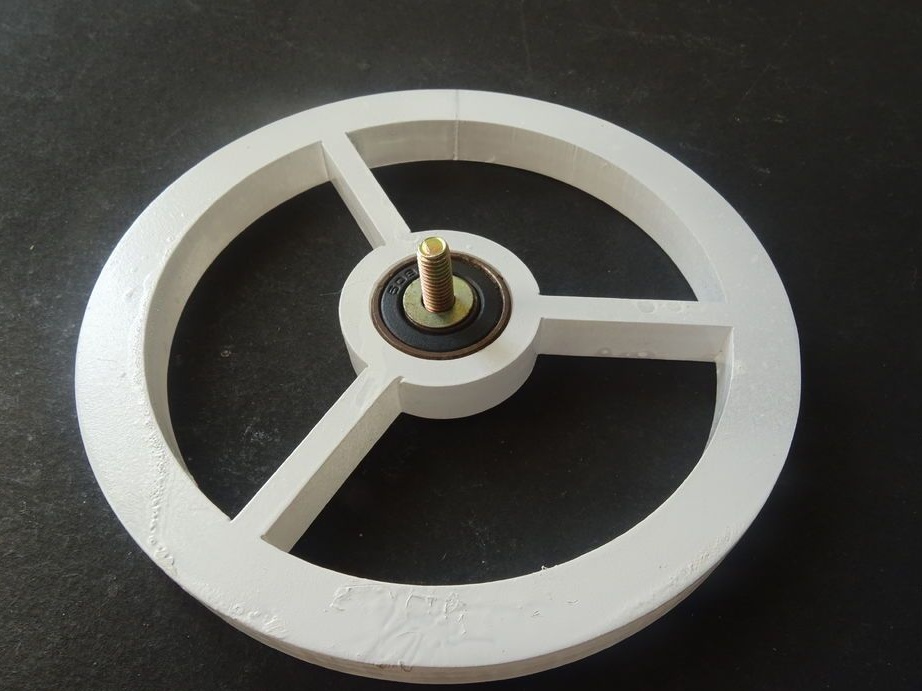
Vienuoliktas žingsnis: rato surinkimas
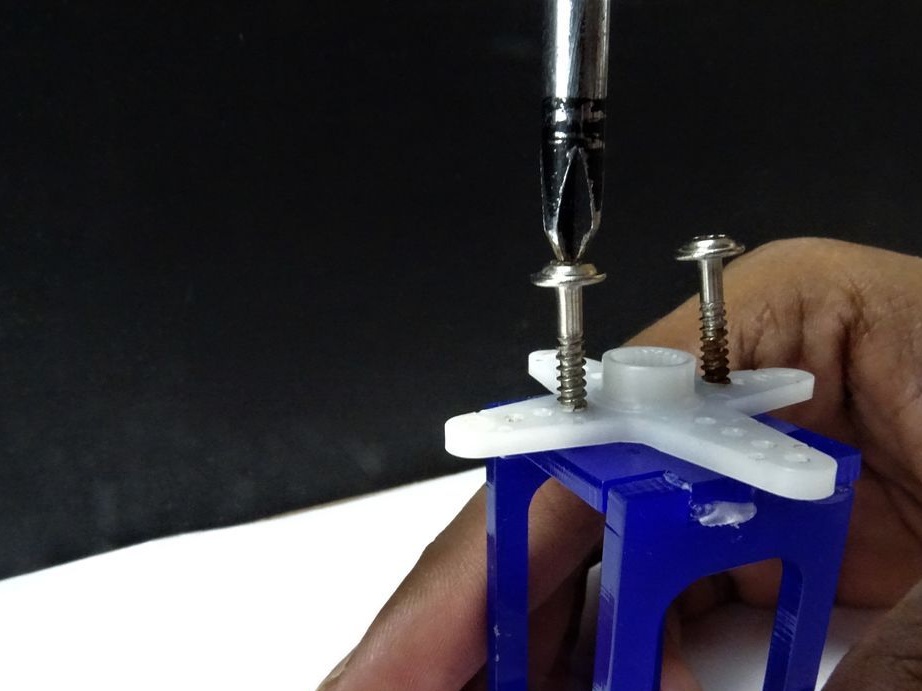
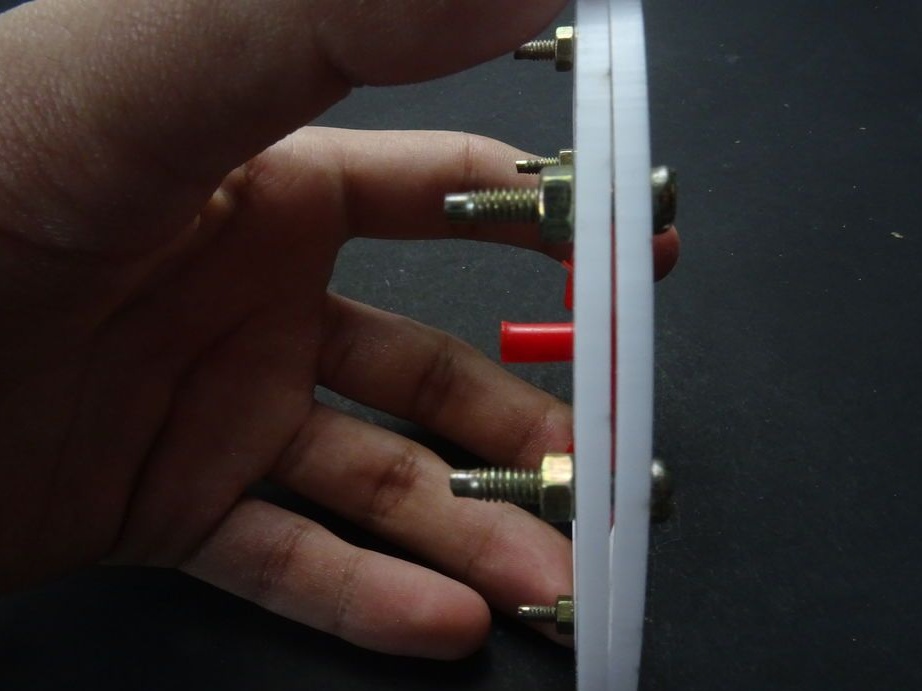
Ant varžtų surenka du ratų ratlankius. Varžtai nėra visiškai priveržti.




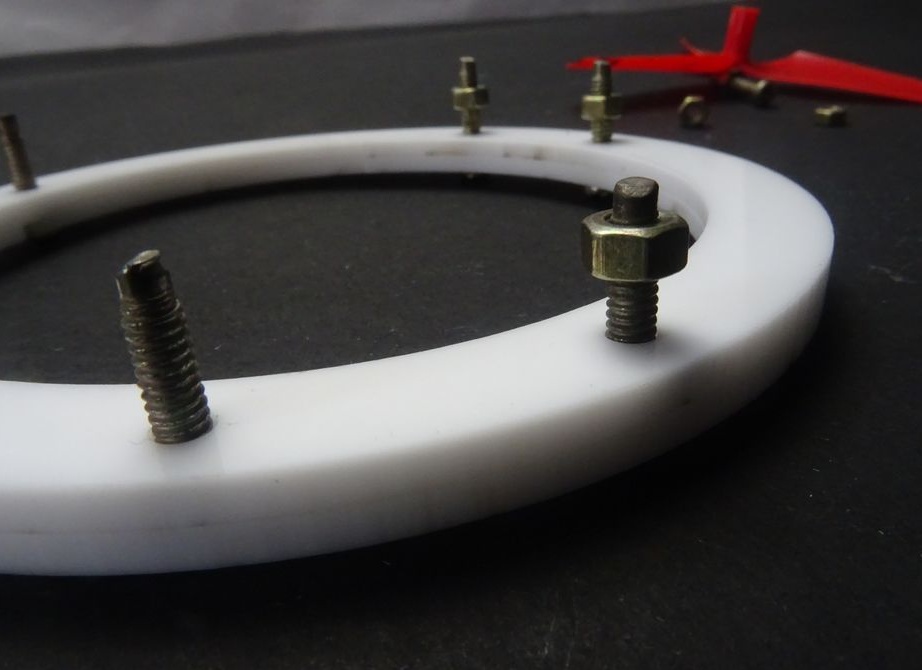
Tarp diskų pritvirtinkite varžtus ir priveržkite varžtus. Montuodami varžtą, turite naudoti šabloną, kad jį sutelktumėte.
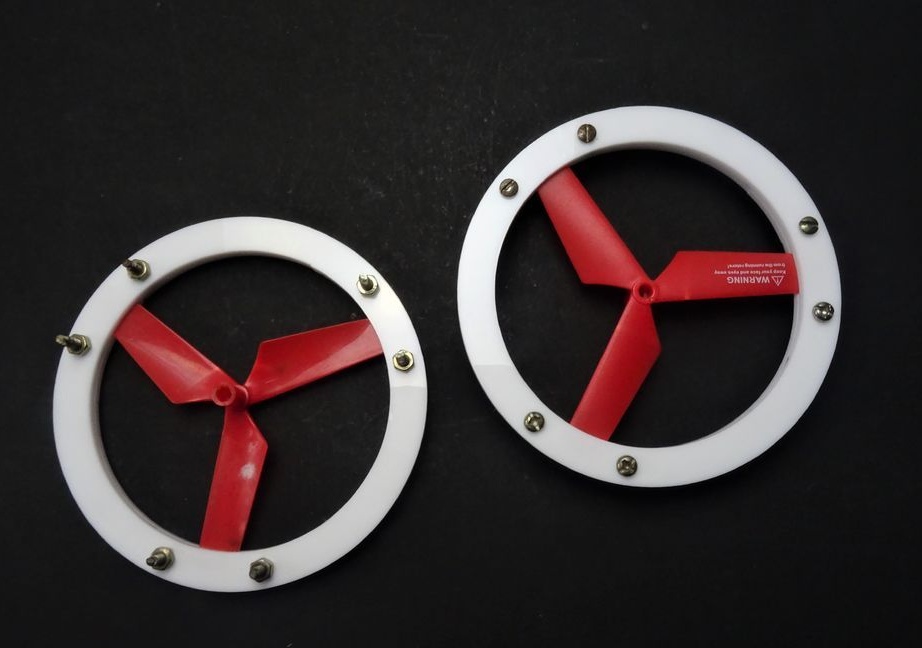
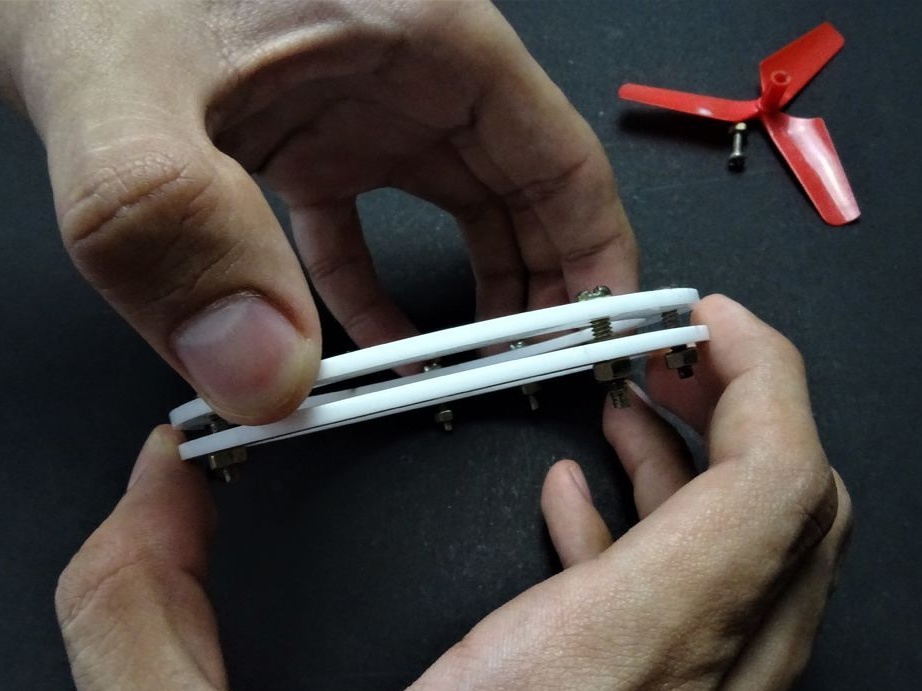
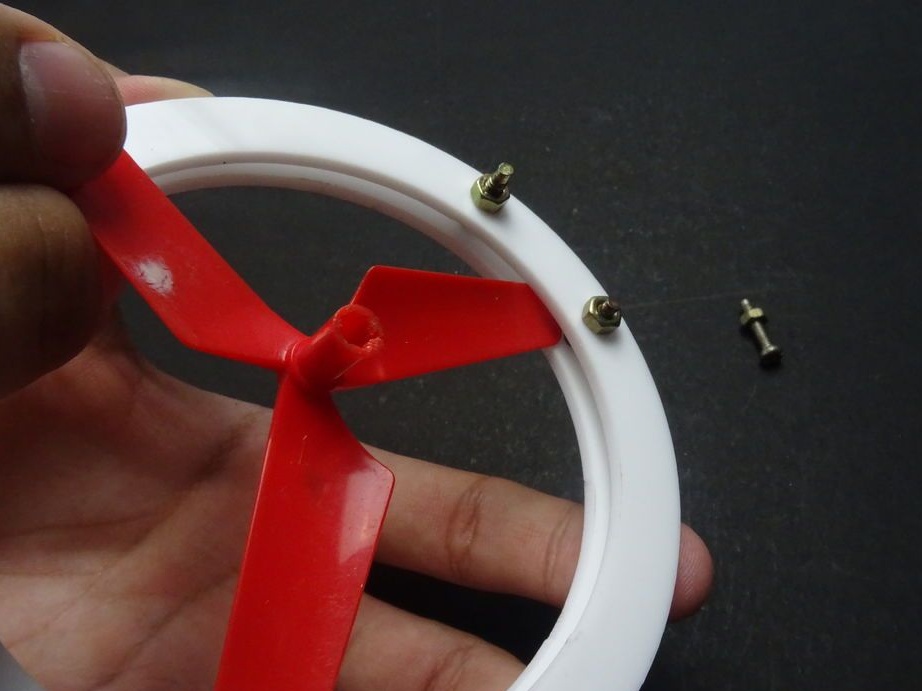
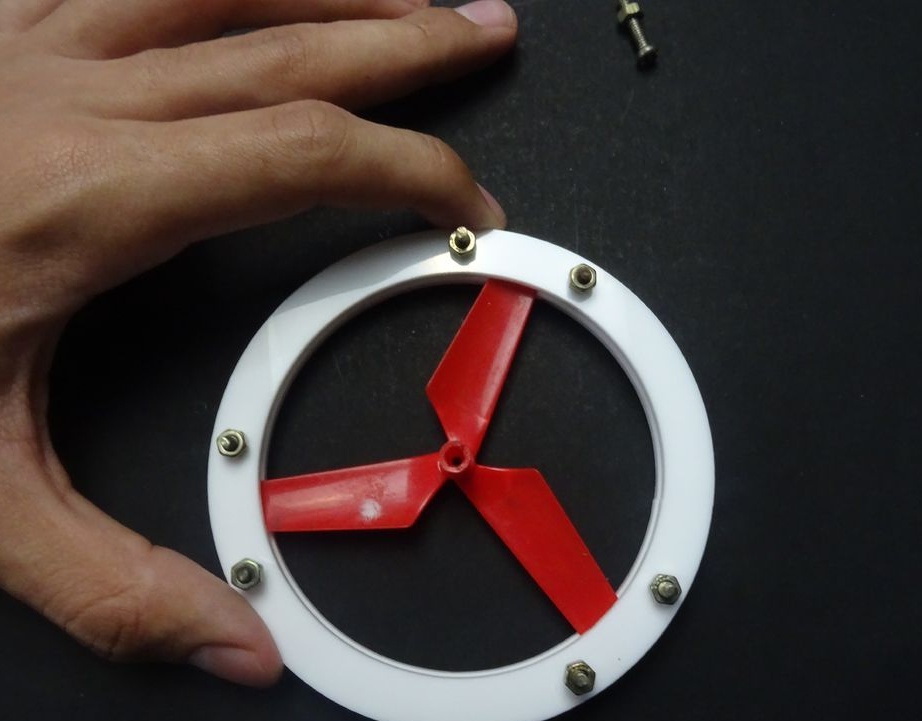

Nustato išorinį rato kraštą. Ratlankis turi būti lygus vidiniam diskui.
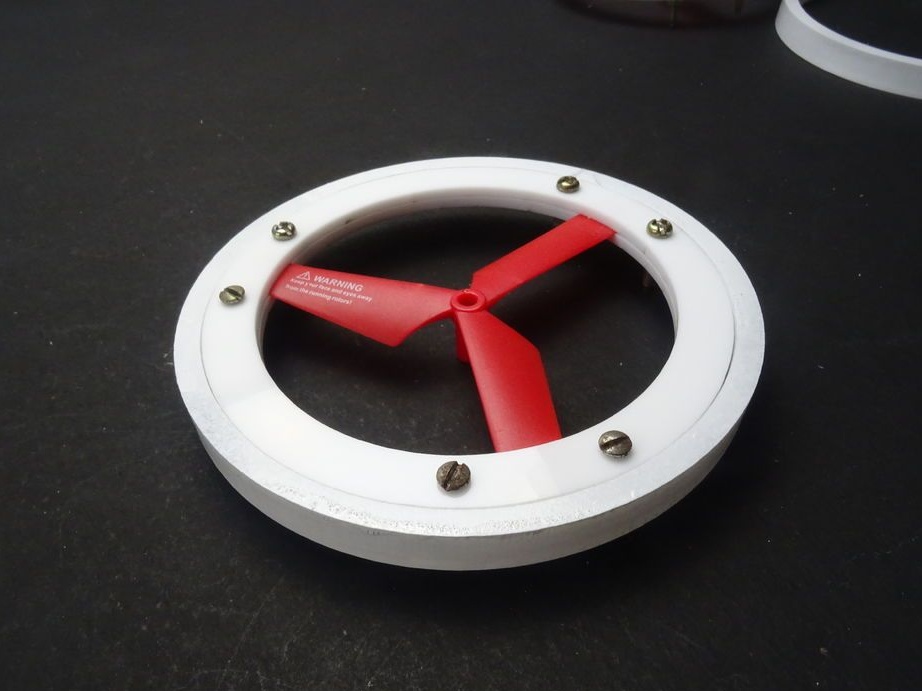

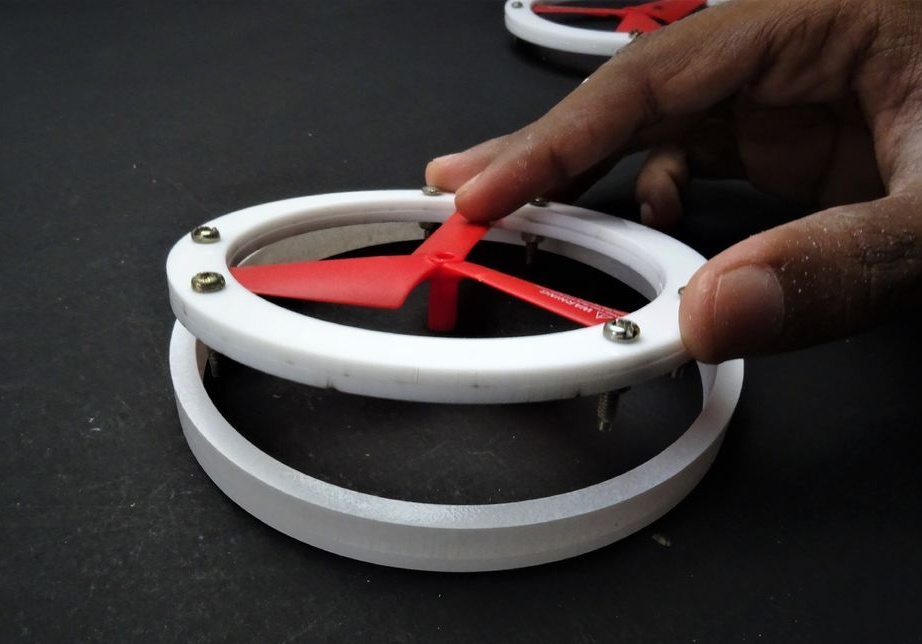
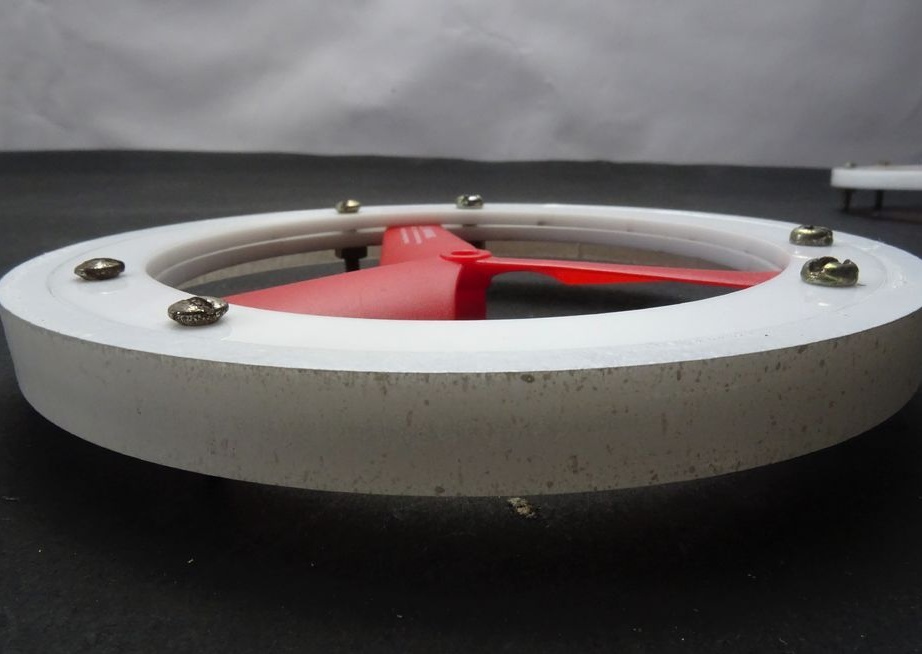

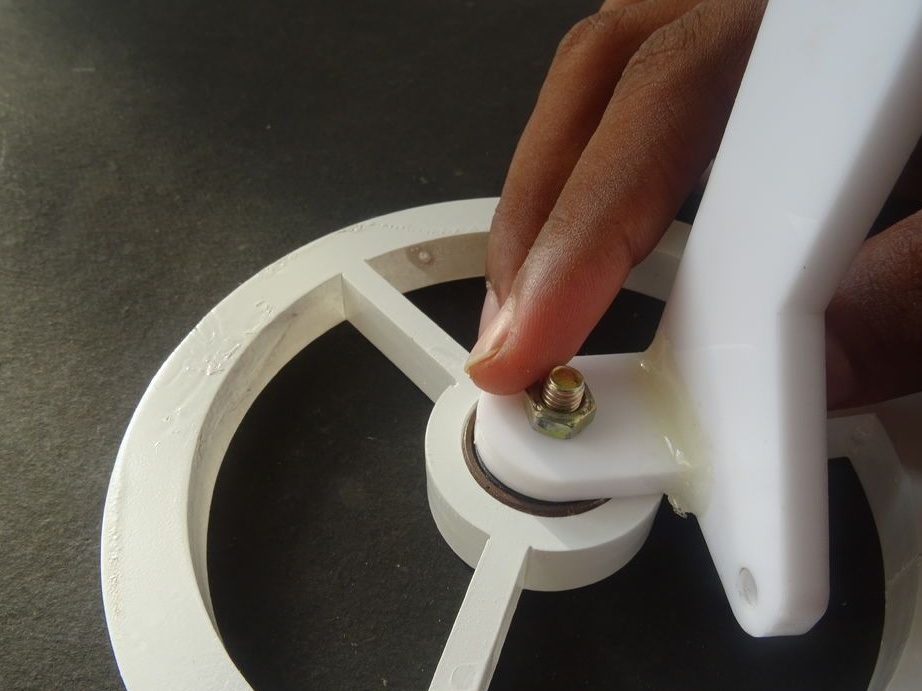
Ant jungties tepkite karštus klijus.


Dabar renka priekinius ratus.
Tinkamo dydžio veržlė užsikemša į guolio vidinę kilpą. Įspaudžia guolius į priekinius ratus.



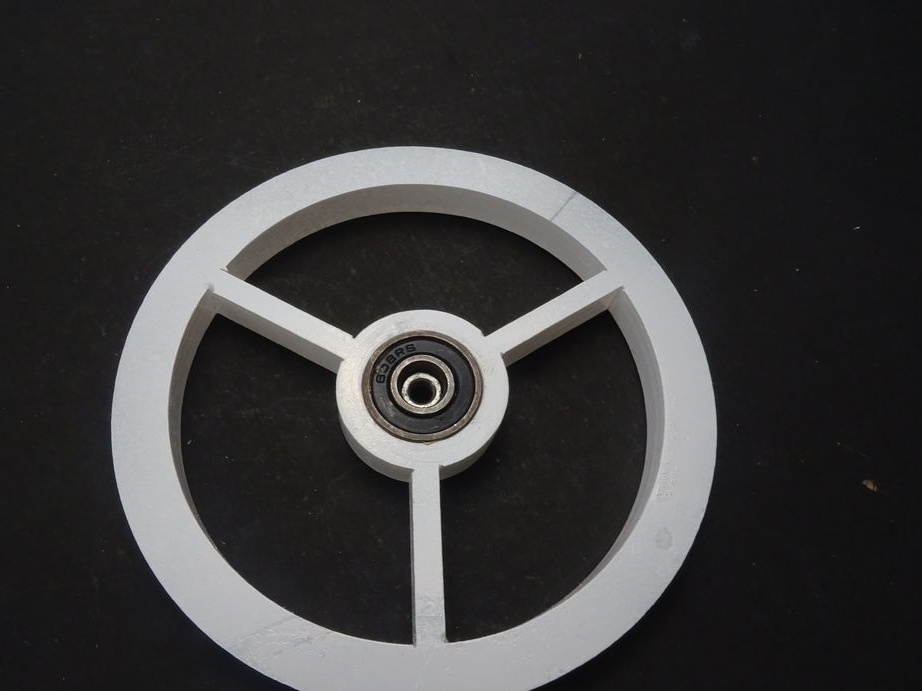
Ratai yra paruošti.

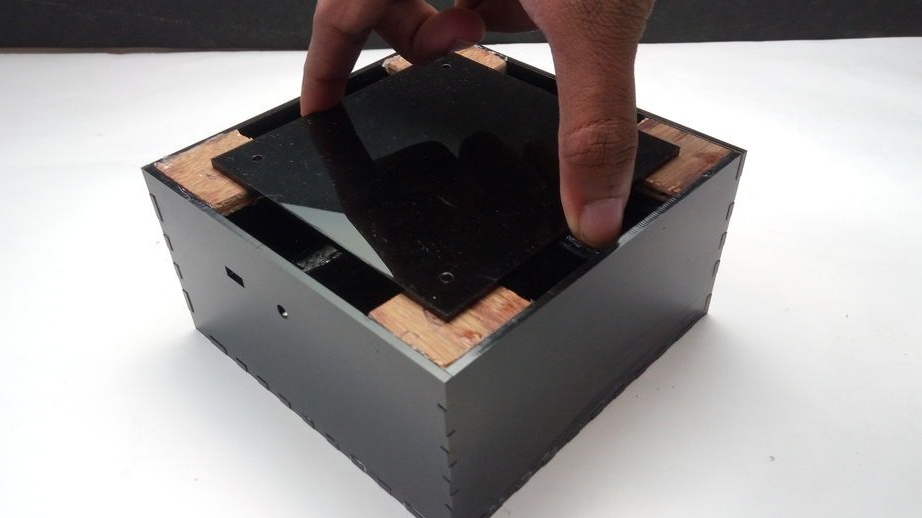
Dvyliktas žingsnis: elektronikos korpusas
Klijuoja elektronikos korpusą.

Šioje dėžutėje bus viskas elektroninis komponentai, tai reiškia, kad jį reikia kuo kruopščiau hidroizoliuoti.


Iš lentos dėžutės kampuose supjaustomi ir suklijuojami keturi kvadratai. Ant jų bus pritvirtintas dėžutės dangtis.



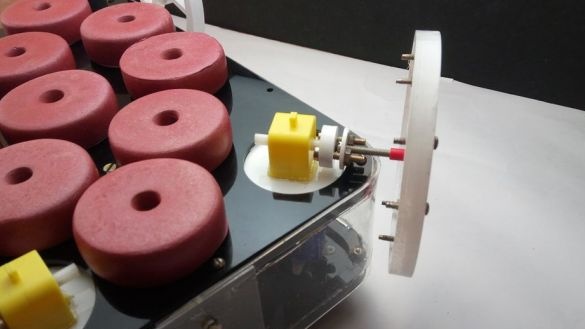
Tryliktas žingsnis: rato tvirtinimas
Dabar jums reikia sujungti ratus ir pavaras su sankaba.





Sraigtiniai priekiniai ratai prisukami.


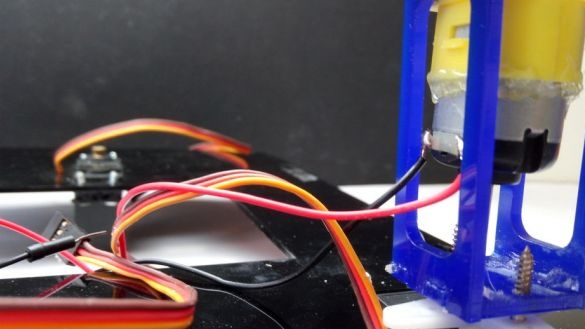
Keturioliktas žingsnis: Prijunkite elektroniką
Pagal schemą jis montuoja elektrines dalis.
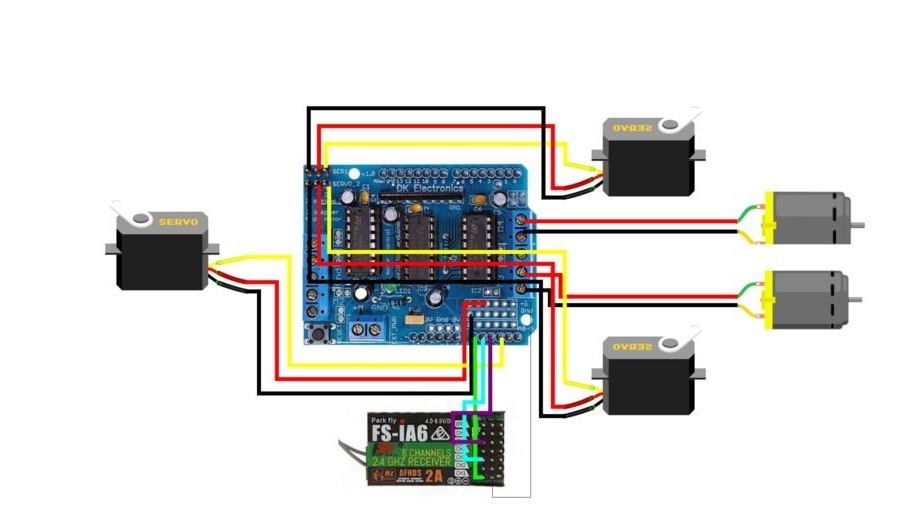

Kairiojo variklio laidai į M1, dešinieji į M2. Prijungia variklio tvarkyklę. Jungia servo. Įdiegia imtuvą: imtuvo imtuvas - „Arndino“; +5 V imtuvas iki +5 V Arduino; 3 kaištis iki A0; kaištis nuo 1 iki A1; 5 kaištis prie A2. Prijungia akumuliatorių.
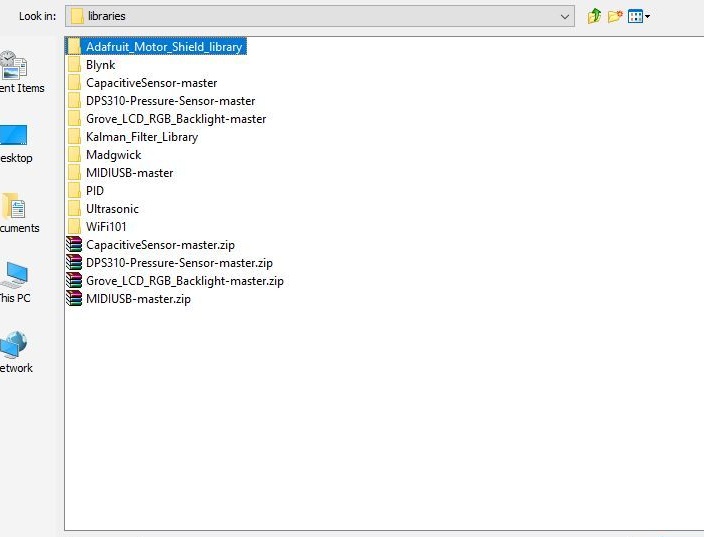
Penkiolika žingsnių: atsisiųskite kodą
Pirmiausia turite atsisiųsti biblioteka.
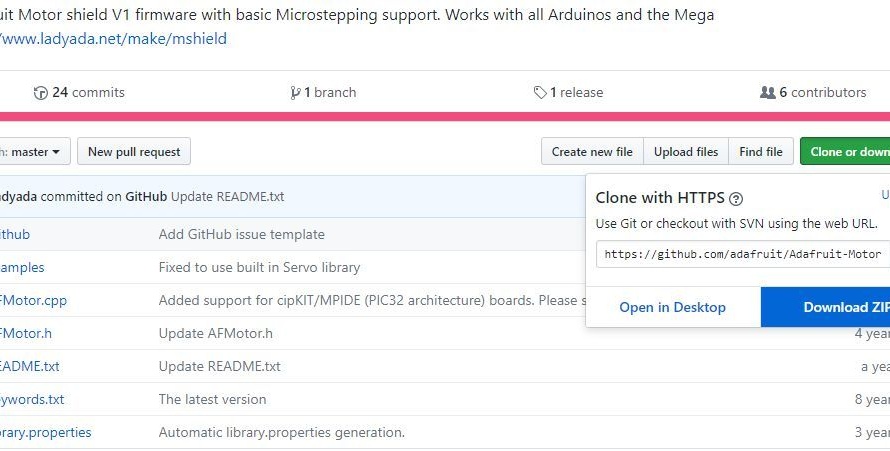
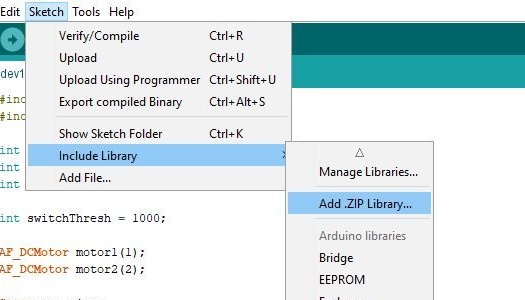
Tada atsisiųskite kodą. Kraunant akumuliatorių reikia atjungti.
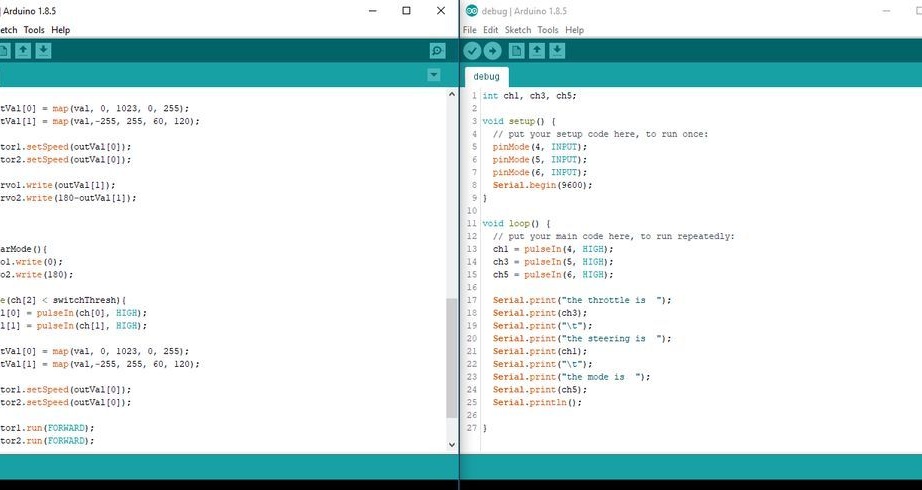
Atsisiųskite žemiau esantį kodą.
amfibijos_paveikslas_code.ino
Atsisiuntęs kodą, jis patikrina variklių ir pavarų veikimą.
Šešioliktas žingsnis: surinkimas
Dabar laikas surinkti visureigį.
[centras[/ centras]
Įdiegia „servos“. Įdiegia reduktorių variklius.

Sutvirtina ratus. Susuka abi kūno dalis.






Viskas paruošta ir dabar galite išbandyti.